
一种单元液压支架搬运机器人.pdf

猫巷****傲柏

1/10

2/10

3/10
4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种单元液压支架搬运机器人.pdf
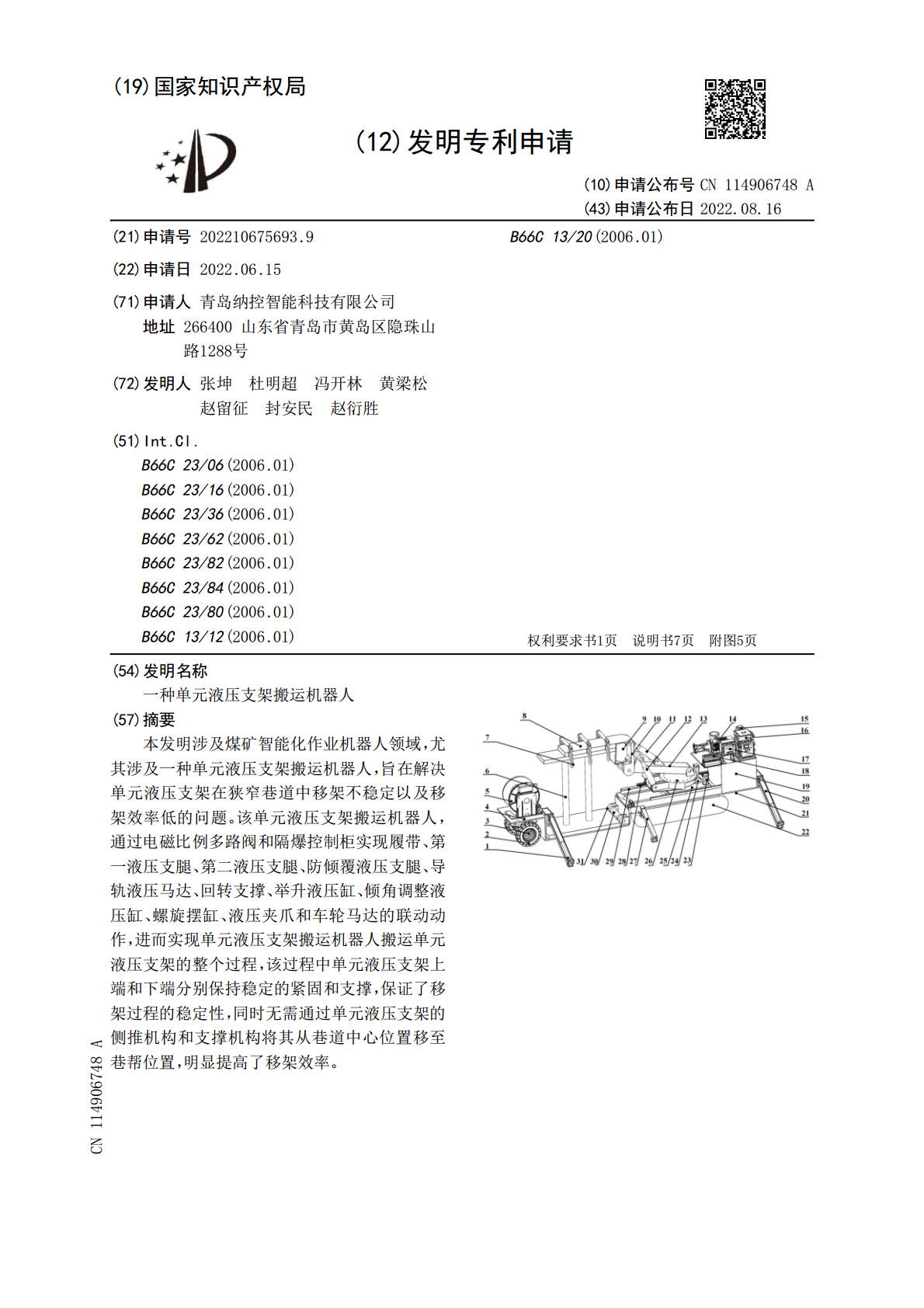
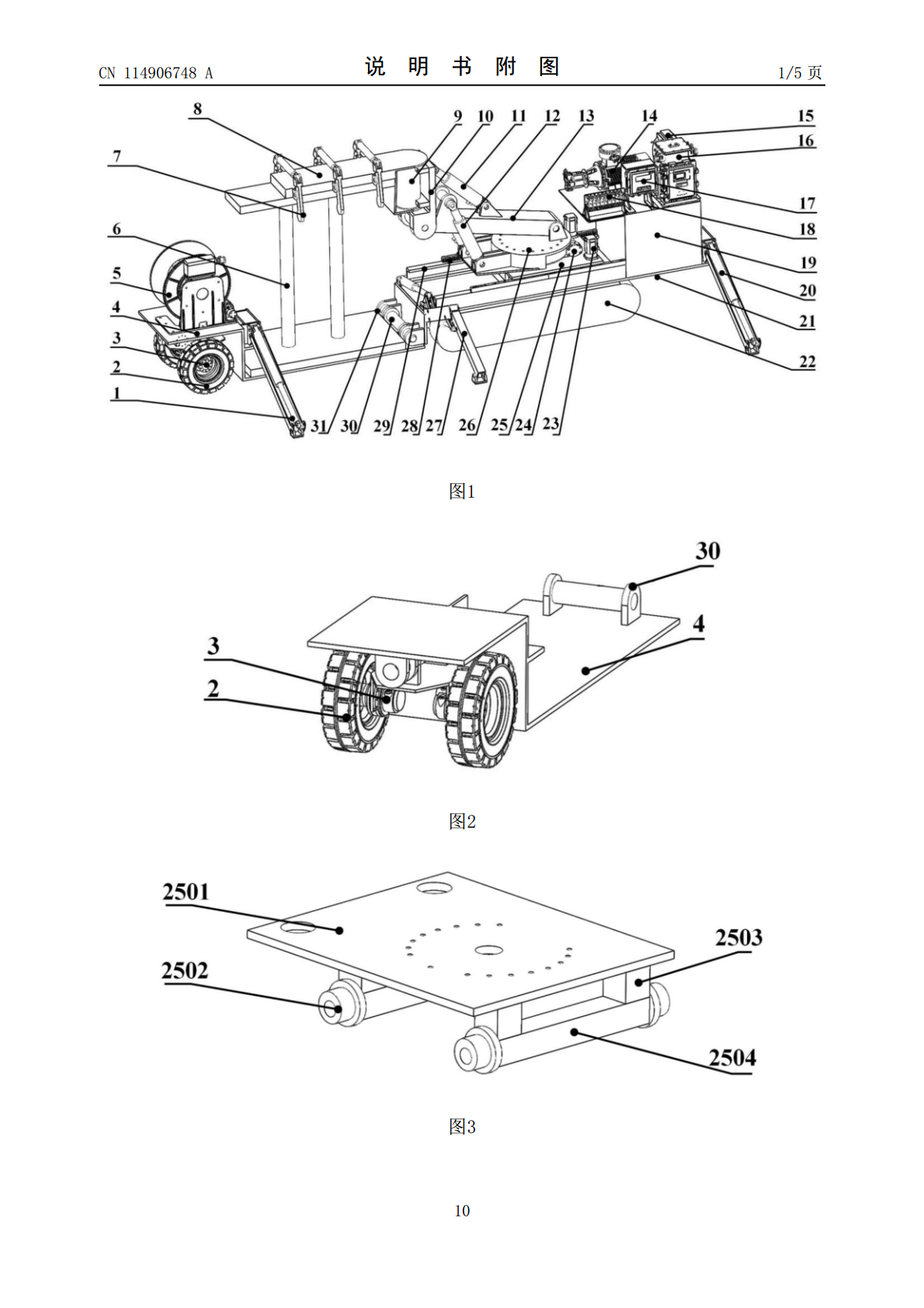
本发明涉及煤矿智能化作业机器人领域,尤其涉及一种单元液压支架搬运机器人,旨在解决单元液压支架在狭窄巷道中移架不稳定以及移架效率低的问题。该单元液压支架搬运机器人,通过电磁比例多路阀和隔爆控制柜实现履带、第一液压支腿、第二液压支腿、防倾覆液压支腿、导轨液压马达、回转支撑、举升液压缸、倾角调整液压缸、螺旋摆缸、液压夹爪和车轮马达的联动动作,进而实现单元液压支架搬运机器人搬运单元液压支架的整个过程,该过程中单元液压支架上端和下端分别保持稳定的紧固和支撑,保证了移架过程的稳定性,同时无需通过单元液压支架的侧推机构

一种液压支架搬运车.pdf
本发明涉及一种矿用设备,具体地说是一种液压支架搬运车,包括驱动装置和承载装置,驱动装置包括铰接式车架、驾驶室、发动机、液力变速箱、传动轴、驱动桥、制动器和车轮,铰接式车架由前车架和后车架组成,发动机通过变速箱与传动轴连接,传动轴设置在前、后车架的下方,在传动轴的前、后两端均通过前驱动桥与车轮连接。所述的承载装置包括“U”型车架、提升装置、支撑油缸和液压控制系统,“U”型车架前部设置梯形支架,梯形支架与后车架的后部铰接连接,在“U”型车架上方设置有升降装置,升降装置通过摆动式液压油缸连接在“U”型车架上部,
一种液压单元支架的搬运装置及其控制方法.pdf
本发明公开了一种液压单元支架的搬运装置及其控制方法,搬运装置包括移架导轨组件和搬运小车;所述移架导轨组件包括搭建在托架上的一条主工字梁,两条前探工字梁,以及两个托架支腿和两个伸缩托架支腿;所述搬运小车包括底座,剪叉式升降机构和平台,以及传动箱;工作时,前探工字梁从托架上伸出,搬运小车能够将后方液压单元支架运送到掘进面的最前端,满足超前支护的需求;托架能够调节导轨组件的倾角,以适应巷道底板的起伏;本发明通过独立轨道和搬运小车转移液压单元支架的方式,可减少掘进支护移架过程中支架对顶板的反复支撑,有效保护巷道顶

一种煤矿井下单元式支架搬运机器人.pdf
本发明提供了一种煤矿井下单元式支架搬运机器人,属于井下运输设备的技术领域,包括搬运机构、主机架、液压系统、发动机总成和履带底盘总成;搬运机构、液压系统和发动机总成均布置在主机架上,履带底盘总成布置在主机架的两侧;搬运机构包括托架、竖向升降架、竖向驱动部、横移平台、横向驱动部、支架铲板、旋转轴、翻转驱动部、伸缩支腿和支腿翻转部。本发明解决了现有技术中单元式支架搬运采用绞车牵引,操作复杂、效率低且存在安全隐患的技术问题。
一种煤矿井下单元式支架搬运机器人.pdf
本发明提供了一种煤矿井下单元式支架搬运机器人,属于井下运输设备的技术领域,包括搬运机构、主机架、液压系统、发动机总成和履带底盘总成;搬运机构、液压系统和发动机总成均布置在主机架上,履带底盘总成布置在主机架的两侧;搬运机构包括托架、竖向升降架、竖向驱动部、横移平台、横向驱动部、支架铲板、旋转轴、翻转驱动部、伸缩支腿和支腿翻转部。本发明解决了现有技术中单元式支架搬运采用绞车牵引,操作复杂、效率低且存在安全隐患的技术问题。