
一种自装卸机构.pdf

邻家****66


1/10
2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种自装卸机构.pdf
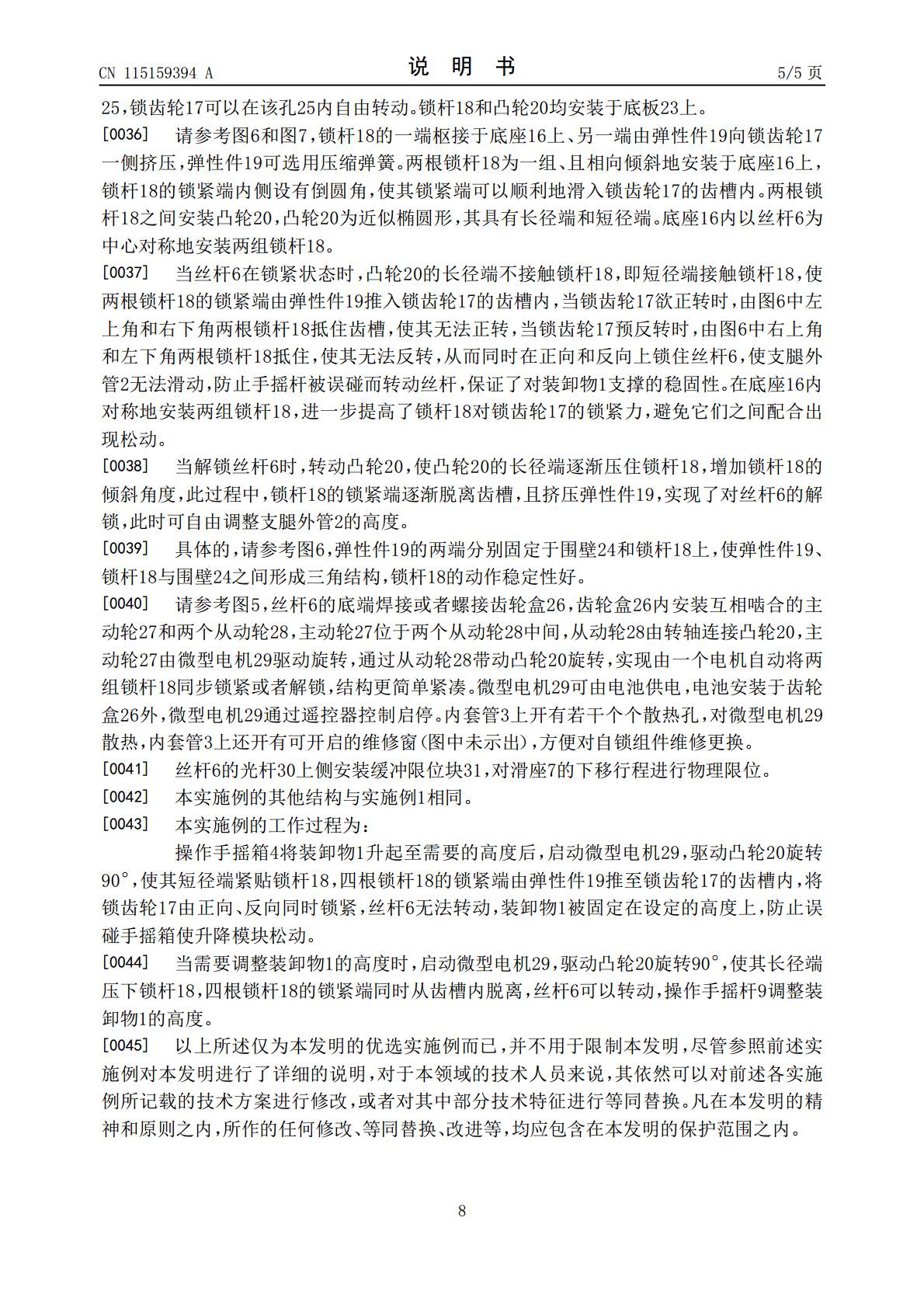
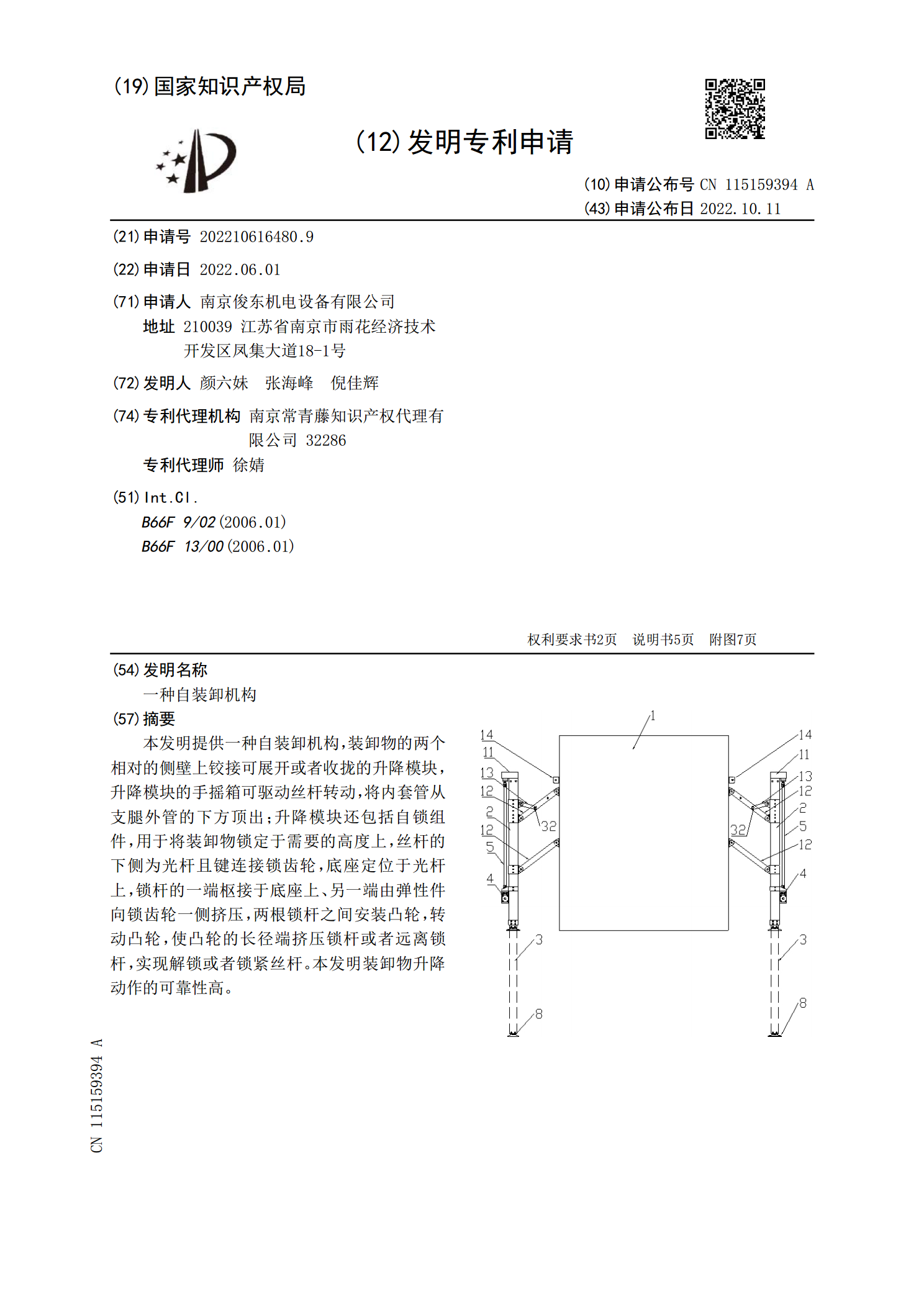
本发明提供一种自装卸机构,装卸物的两个相对的侧壁上铰接可展开或者收拢的升降模块,升降模块的手摇箱可驱动丝杆转动,将内套管从支腿外管的下方顶出;升降模块还包括自锁组件,用于将装卸物锁定于需要的高度上,丝杆的下侧为光杆且键连接锁齿轮,底座定位于光杆上,锁杆的一端枢接于底座上、另一端由弹性件向锁齿轮一侧挤压,两根锁杆之间安装凸轮,转动凸轮,使凸轮的长径端挤压锁杆或者远离锁杆,实现解锁或者锁紧丝杆。本发明装卸物升降动作的可靠性高。
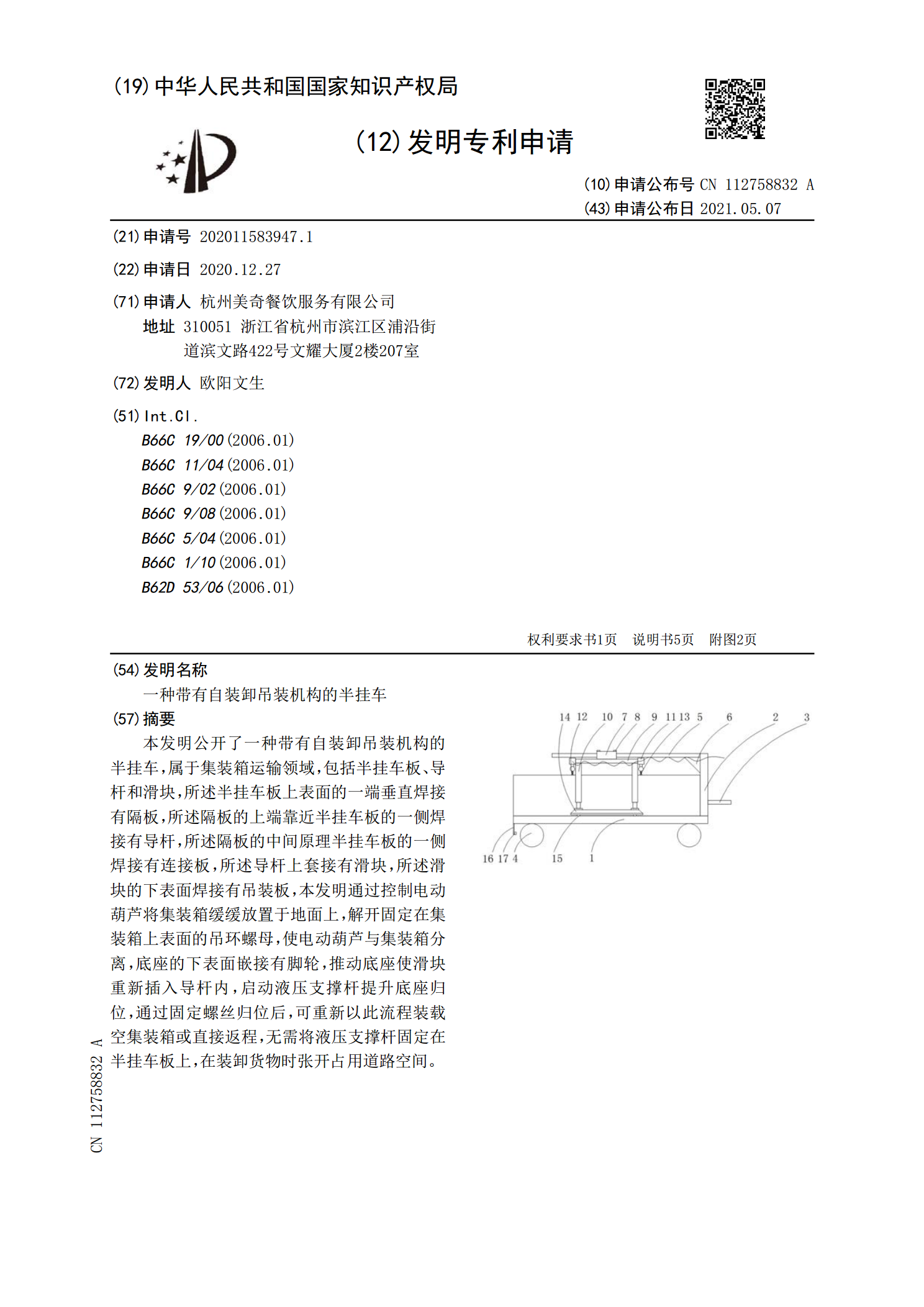
一种带有自装卸吊装机构的半挂车.pdf
本发明公开了一种带有自装卸吊装机构的半挂车,属于集装箱运输领域,包括半挂车板、导杆和滑块,所述半挂车板上表面的一端垂直焊接有隔板,所述隔板的上端靠近半挂车板的一侧焊接有导杆,所述隔板的中间原理半挂车板的一侧焊接有连接板,所述导杆上套接有滑块,所述滑块的下表面焊接有吊装板,本发明通过控制电动葫芦将集装箱缓缓放置于地面上,解开固定在集装箱上表面的吊环螺母,使电动葫芦与集装箱分离,底座的下表面嵌接有脚轮,推动底座使滑块重新插入导杆内,启动液压支撑杆提升底座归位,通过固定螺丝归位后,可重新以此流程装载空集装箱或直

一种装卸装置自升降机构的支撑结构.pdf
一种装卸装置自升降机构的支撑结构,具有车体,包括支撑总成、销轴、摇臂、锁轴一、锁轴二、固定支架、推力杆一以及电力驱动装置一,支撑总成包含有推力杆二、电力驱动装置二、内支撑架体、外支撑架体、转动支架以及固定轴,本发明上所记载的技术方案,首先可以令该升降支撑结构隐藏于车体的下部,使得车体外观美感以及行驶状态不受影响,其次该结构能够使车辆上设置的装置需要进行提升时完成高度的升降而不需要单独设置分体式的升降装置,该升降支腿结构可以应用于车辆前端也可以是后端,可选择性较大且内支撑架体的底部设置的支撑座可以对不同地形

装载机自装卸作业机构.pdf
本发明涉及一种装载机自装卸作业机构,其结构包括:承载和装卸货物用的货叉机构,与所述货叉机构通过轴连接、用于控制所述货叉机构伸缩、升降的上平行四杆机构,与所述上平行四杆机构通过轴连接、用于控制作业机构整体起伏的下平行四杆机构,以及与所述下平行四杆机构相铰接、作为作业机构承载体的车架;在所述货叉机构上装有滚轮,承载所述滚轮的滑轨固定在所述车架上。本发明动作灵活,操作方便,运行平稳,作业应用范围广,既可适应各种恶劣工作地形,又可在狭小的工作场地实施搬运工作,提高了装卸作业的平稳性和操作的方便性。
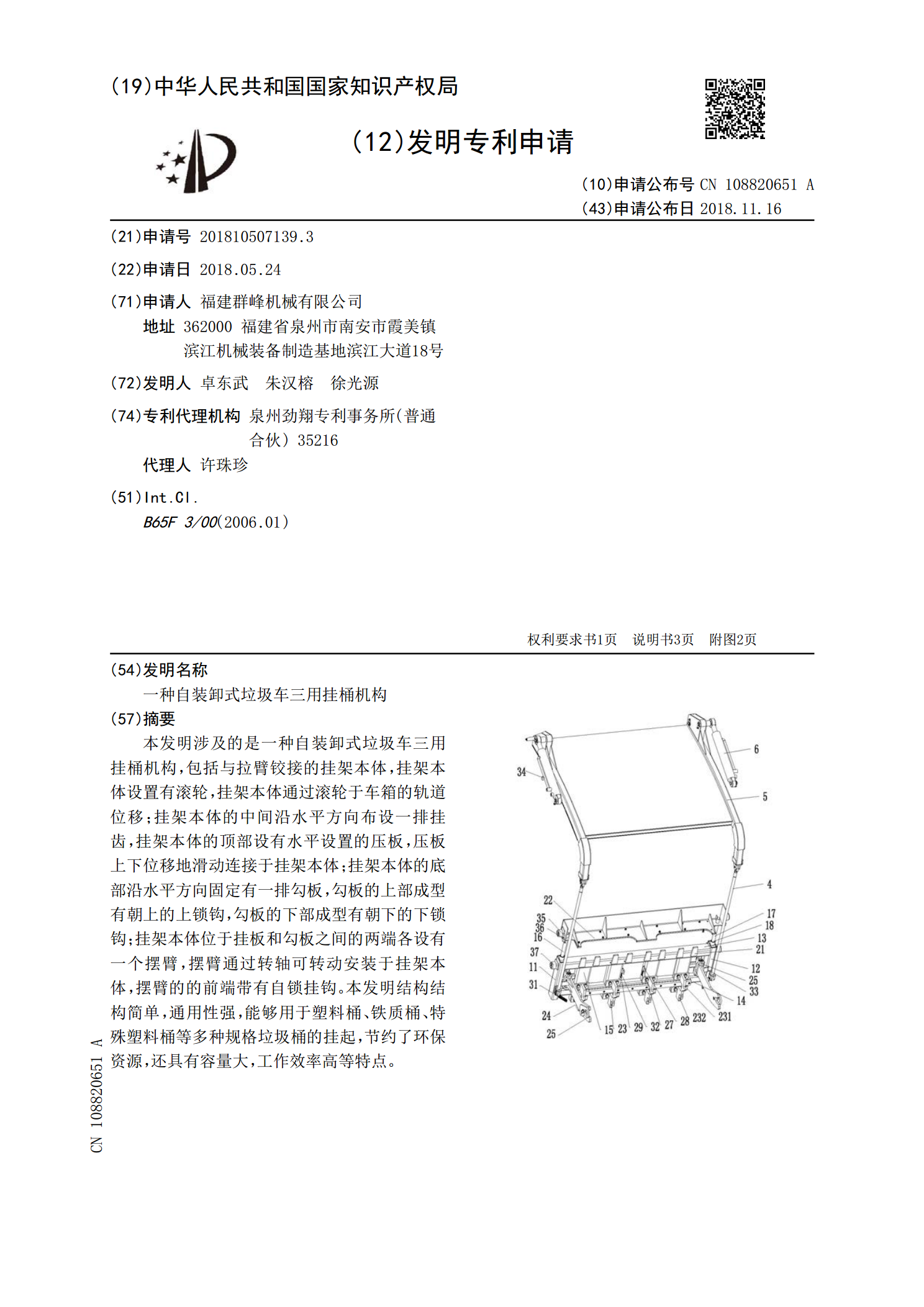
一种自装卸式垃圾车三用挂桶机构.pdf
本发明涉及的是一种自装卸式垃圾车三用挂桶机构,包括与拉臂铰接的挂架本体,挂架本体设置有滚轮,挂架本体通过滚轮于车箱的轨道位移;挂架本体的中间沿水平方向布设一排挂齿,挂架本体的顶部设有水平设置的压板,压板上下位移地滑动连接于挂架本体;挂架本体的底部沿水平方向固定有一排勾板,勾板的上部成型有朝上的上锁钩,勾板的下部成型有朝下的下锁钩;挂架本体位于挂板和勾板之间的两端各设有一个摆臂,摆臂通过转轴可转动安装于挂架本体,摆臂的的前端带有自锁挂钩。本发明结构结构简单,通用性强,能够用于塑料桶、铁质桶、特殊塑料桶等多种