
基于单幅RGB-D图像的室内场景曼哈顿坐标系估计研究的任务书.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于单幅RGB-D图像的室内场景曼哈顿坐标系估计研究.docx
基于单幅RGB-D图像的室内场景曼哈顿坐标系估计研究标题:基于单幅RGB-D图像的室内场景曼哈顿坐标系估计研究摘要:近年来,随着RGB-D传感器的发展和应用,基于单幅RGB-D图像的室内场景曼哈顿坐标系估计成为计算机视觉领域的重要研究方向。室内场景曼哈顿坐标系估计是指通过分析单幅室内场景图像中物体的几何结构和相对位置关系,来推断出场景中物体的局部坐标和全局结构。本文综述了当前的研究状态和存在的挑战,然后介绍了一种基于深度学习的方法来估计室内场景曼哈顿坐标系,并对该方法进行了实验验证。实验结果表明,该方法在

基于单幅RGB-D图像的室内场景曼哈顿坐标系估计研究的任务书.docx
基于单幅RGB-D图像的室内场景曼哈顿坐标系估计研究的任务书任务概述本次任务旨在研究基于单幅RGB-D图像的室内场景曼哈顿坐标系估计方法,主要涉及室内场景分割、物体检测、深度估计、视差计算等多个领域,需要综合运用计算机视觉、深度学习等相关技术方法,完成对室内场景曼哈顿坐标系的估计任务。任务目标主要任务目标如下:1.设计室内场景曼哈顿坐标系的建立方法,以及相应的坐标系变换方法,实现对室内场景的精确估计。2.设计室内场景分割和物体检测算法,将场景中的每个物体分离出来,并对物体进行分类,确定物体的类别和位置。3

基于单幅RGB-D图像的室内场景曼哈顿坐标系估计研究的开题报告.docx
基于单幅RGB-D图像的室内场景曼哈顿坐标系估计研究的开题报告一、选题背景在计算机视觉领域中,室内场景的三维重建一直是一个非常重要的研究方向。对于机器人、虚拟现实、增强现实等领域来说,室内三维场景重建至关重要。而在室内三维场景重建的过程中,如何进行方法的选择是一个十分关键的问题,其中最重要的是选择何种方式进行场景的坐标系的建立。本文将研究基于单幅RGB-D图像的室内场景曼哈顿坐标系估计的方法,实现在场景重建时对室内场景的更加准确的建模。二、研究目的曼哈顿坐标系估计方法是一种流行的室内场景坐标系建立方法。通
一种基于单幅图像的室内场景光照环境估计方法.pdf
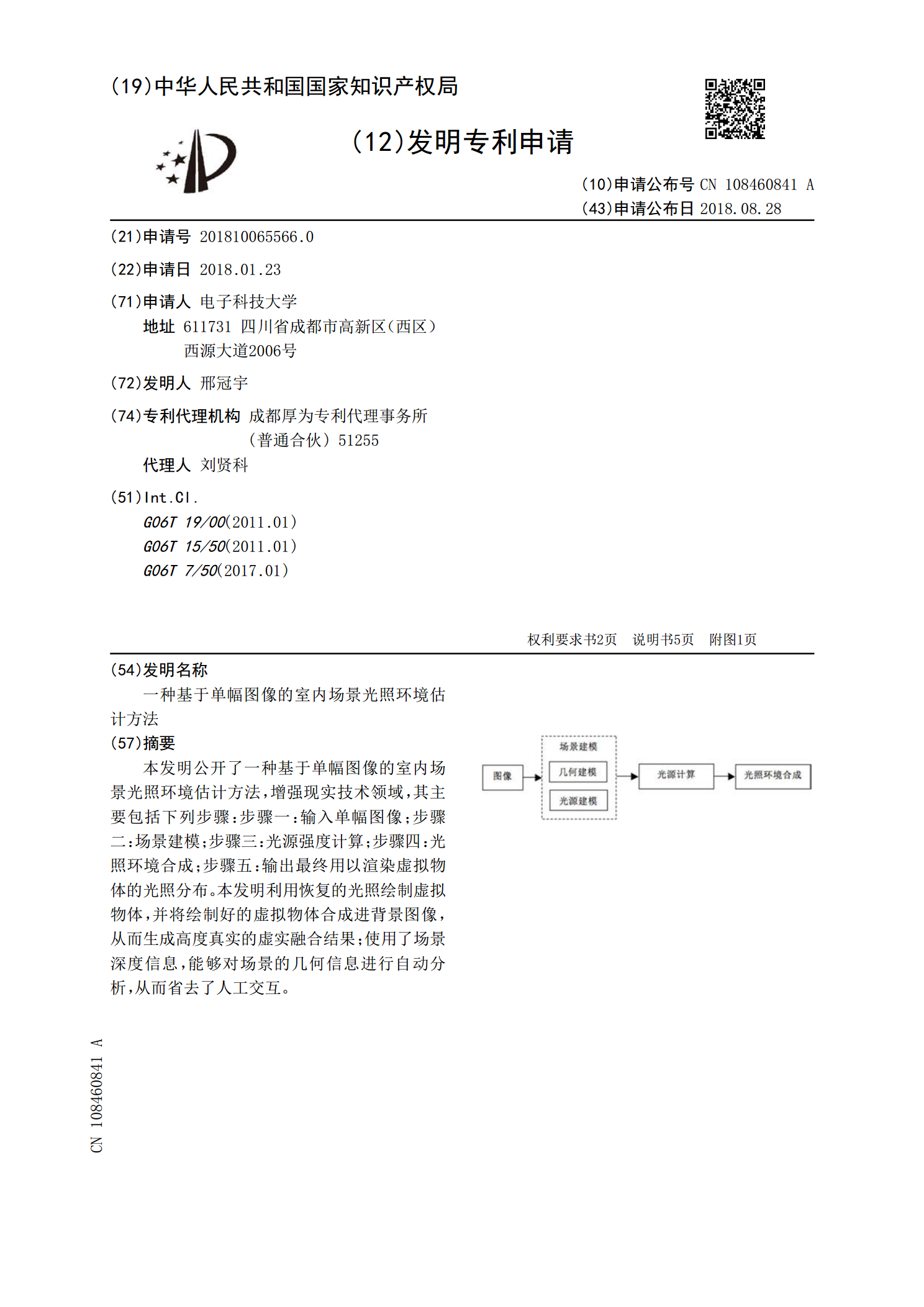
本发明公开了一种基于单幅图像的室内场景光照环境估计方法,增强现实技术领域,其主要包括下列步骤:步骤一:输入单幅图像;步骤二:场景建模;步骤三:光源强度计算;步骤四:光照环境合成;步骤五:输出最终用以渲染虚拟物体的光照分布。本发明利用恢复的光照绘制虚拟物体,并将绘制好的虚拟物体合成进背景图像,从而生成高度真实的虚实融合结果;使用了场景深度信息,能够对场景的几何信息进行自动分析,从而省去了人工交互。
基于卷积神经网络的单幅图像室内物体姿态估计.pptx
汇报人:/目录0102卷积神经网络的结构卷积神经网络的学习过程卷积神经网络在图像处理中的应用03基于深度学习的单幅图像室内物体姿态估计基于特征匹配的单幅图像室内物体姿态估计基于模型的单幅图像室内物体姿态估计04数据预处理特征提取姿态估计与优化结果展示与评估05实验数据集介绍实验设置与参数选择实验结果展示结果分析06基于卷积神经网络的单幅图像室内物体姿态估计的优势与局限性未来研究方向与展望汇报人: