
基于单幅RGB-D图像的室内场景曼哈顿坐标系估计研究的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于单幅RGB-D图像的室内场景曼哈顿坐标系估计研究的开题报告.docx
基于单幅RGB-D图像的室内场景曼哈顿坐标系估计研究的开题报告一、选题背景在计算机视觉领域中,室内场景的三维重建一直是一个非常重要的研究方向。对于机器人、虚拟现实、增强现实等领域来说,室内三维场景重建至关重要。而在室内三维场景重建的过程中,如何进行方法的选择是一个十分关键的问题,其中最重要的是选择何种方式进行场景的坐标系的建立。本文将研究基于单幅RGB-D图像的室内场景曼哈顿坐标系估计的方法,实现在场景重建时对室内场景的更加准确的建模。二、研究目的曼哈顿坐标系估计方法是一种流行的室内场景坐标系建立方法。通

基于单幅RGB-D图像的室内场景曼哈顿坐标系估计研究的任务书.docx
基于单幅RGB-D图像的室内场景曼哈顿坐标系估计研究的任务书任务概述本次任务旨在研究基于单幅RGB-D图像的室内场景曼哈顿坐标系估计方法,主要涉及室内场景分割、物体检测、深度估计、视差计算等多个领域,需要综合运用计算机视觉、深度学习等相关技术方法,完成对室内场景曼哈顿坐标系的估计任务。任务目标主要任务目标如下:1.设计室内场景曼哈顿坐标系的建立方法,以及相应的坐标系变换方法,实现对室内场景的精确估计。2.设计室内场景分割和物体检测算法,将场景中的每个物体分离出来,并对物体进行分类,确定物体的类别和位置。3

基于单幅图像的三维室内场景重建及其布局研究的开题报告.docx
基于单幅图像的三维室内场景重建及其布局研究的开题报告一、研究背景三维室内场景重建和布局是计算机视觉、计算机图形学及人机交互领域的重要研究方向,在智能家居、虚拟现实等领域得到广泛应用。然而,目前常用的三维场景重建技术主要基于多视角成像或深度传感器,这些方法存在昂贵的设备成本、复杂的硬件部署和操作难度高等问题,限制了它们在实际应用中的使用。因此,基于单幅图像的三维室内场景重建及其布局研究具有重要的理论和实践意义。二、研究内容1.单幅室内图像的特征提取与匹配本研究首先需要实现单幅室内图像的特征提取,将图像中的关
一种基于单幅图像的室内场景光照环境估计方法.pdf
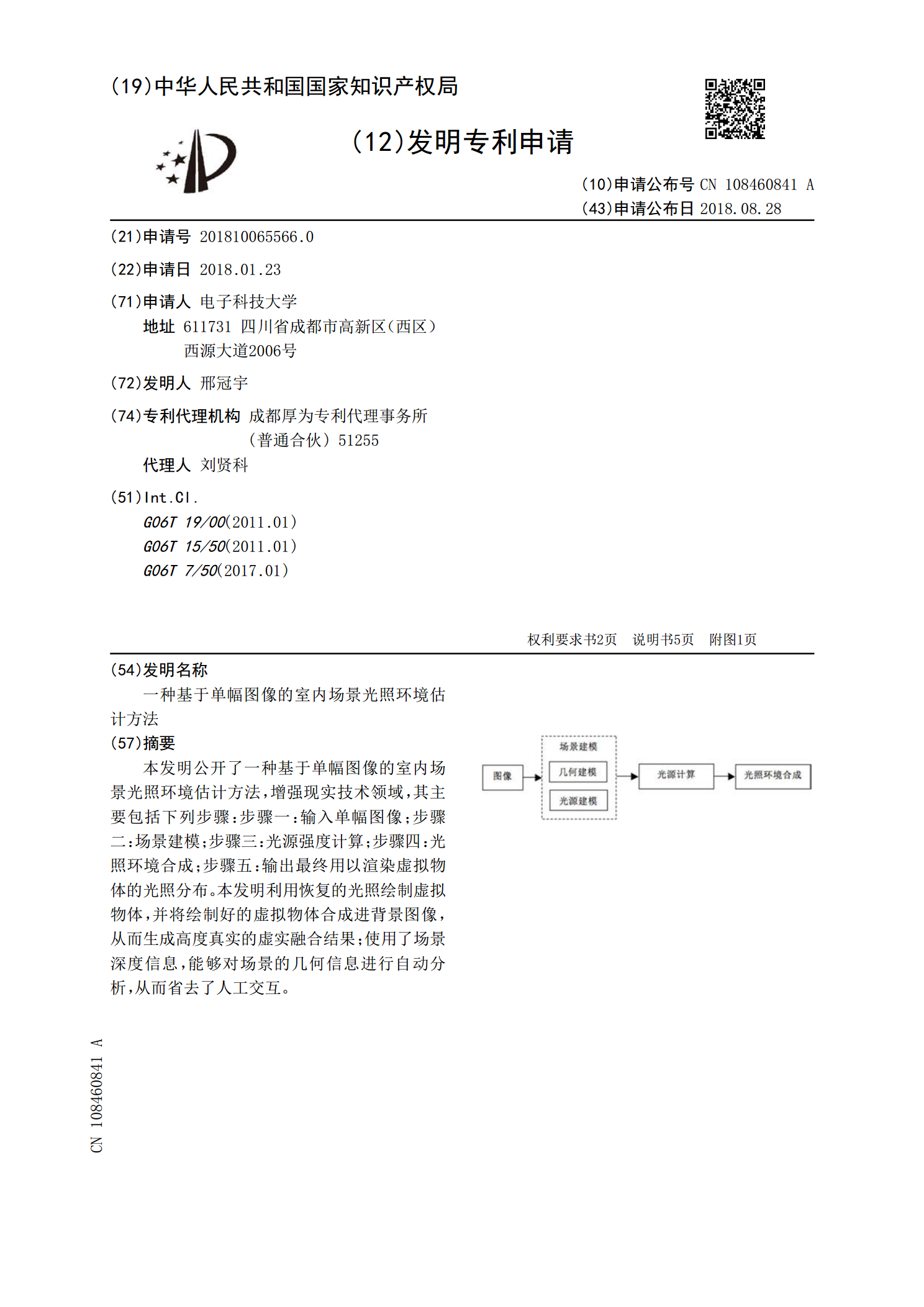
本发明公开了一种基于单幅图像的室内场景光照环境估计方法,增强现实技术领域,其主要包括下列步骤:步骤一:输入单幅图像;步骤二:场景建模;步骤三:光源强度计算;步骤四:光照环境合成;步骤五:输出最终用以渲染虚拟物体的光照分布。本发明利用恢复的光照绘制虚拟物体,并将绘制好的虚拟物体合成进背景图像,从而生成高度真实的虚实融合结果;使用了场景深度信息,能够对场景的几何信息进行自动分析,从而省去了人工交互。

基于RGBD图像的图像分割算法研究的开题报告.docx
基于RGBD图像的图像分割算法研究的开题报告一、研究背景及意义随着深度学习技术的不断发展,图像分割已经成为计算机视觉领域的重要研究方向之一。常见的图像分割算法包括基于颜色、纹理、边缘等特征的传统算法以及基于深度学习的语义分割算法。其中,基于RGBD图像的图像分割算法是近年来的新兴研究方向。RGBD图像是同时包含颜色和深度信息的图像,相比于仅具有颜色信息的RGB图像,在物体边界、透明物体、深度不一等方面能够提供更多的信息。基于RGBD图像的图像分割涉及颜色、纹理和深度等信息的综合利用,可以更加准确地将图像分