
一种玻璃搬运机器人.pdf

猫巷****晓容

1/10
2/10

3/10
4/10

5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种玻璃搬运机器人.pdf
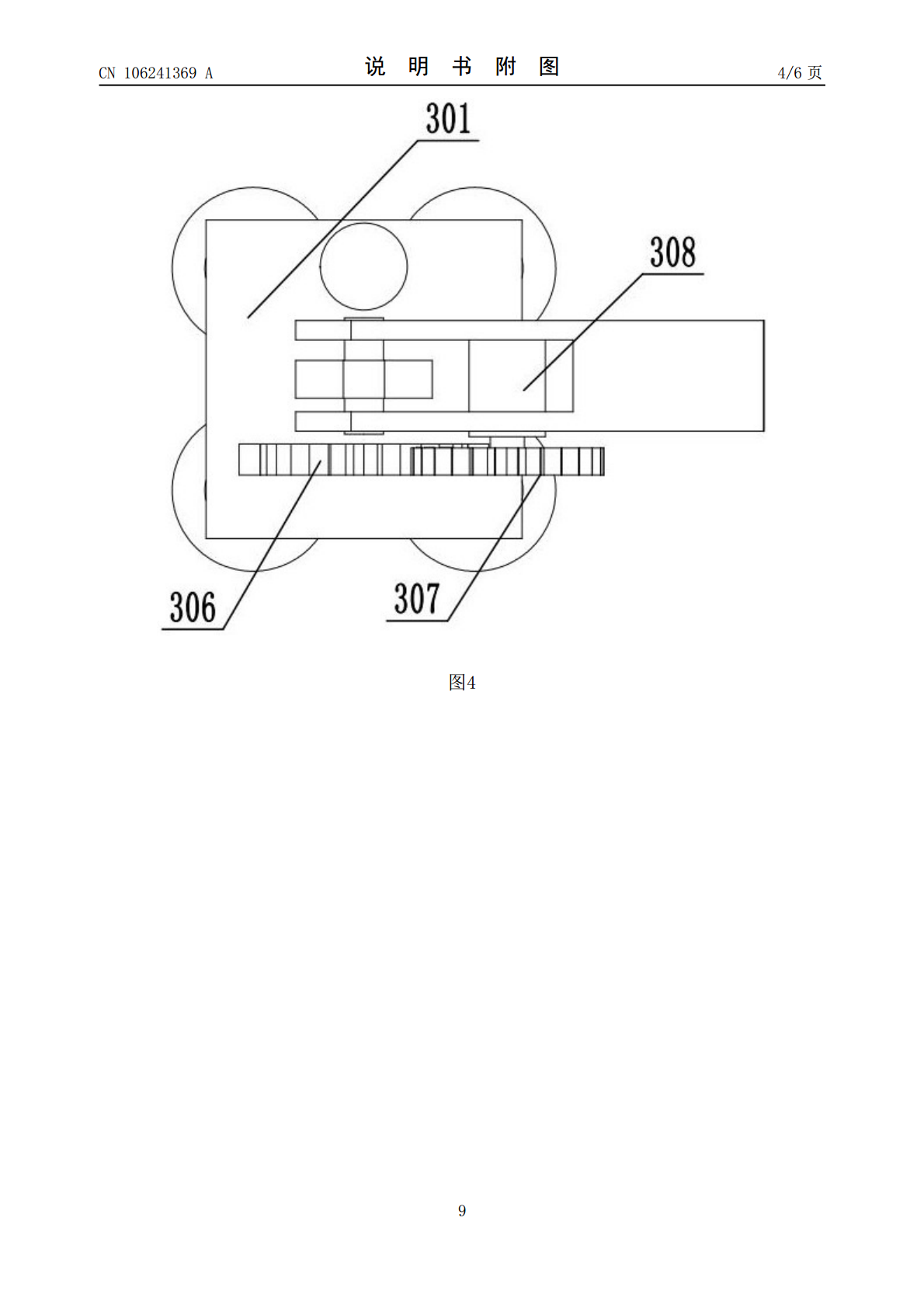
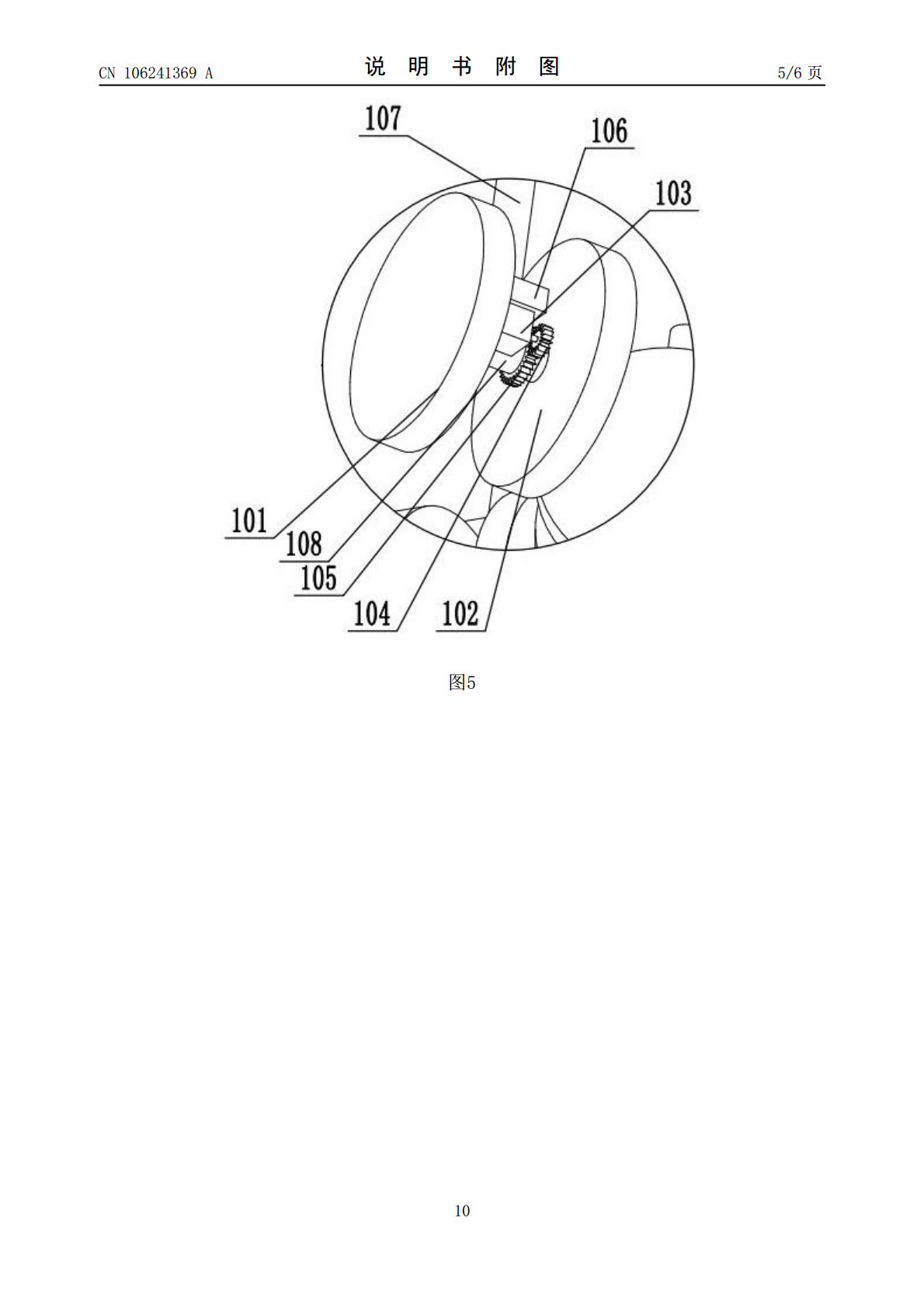
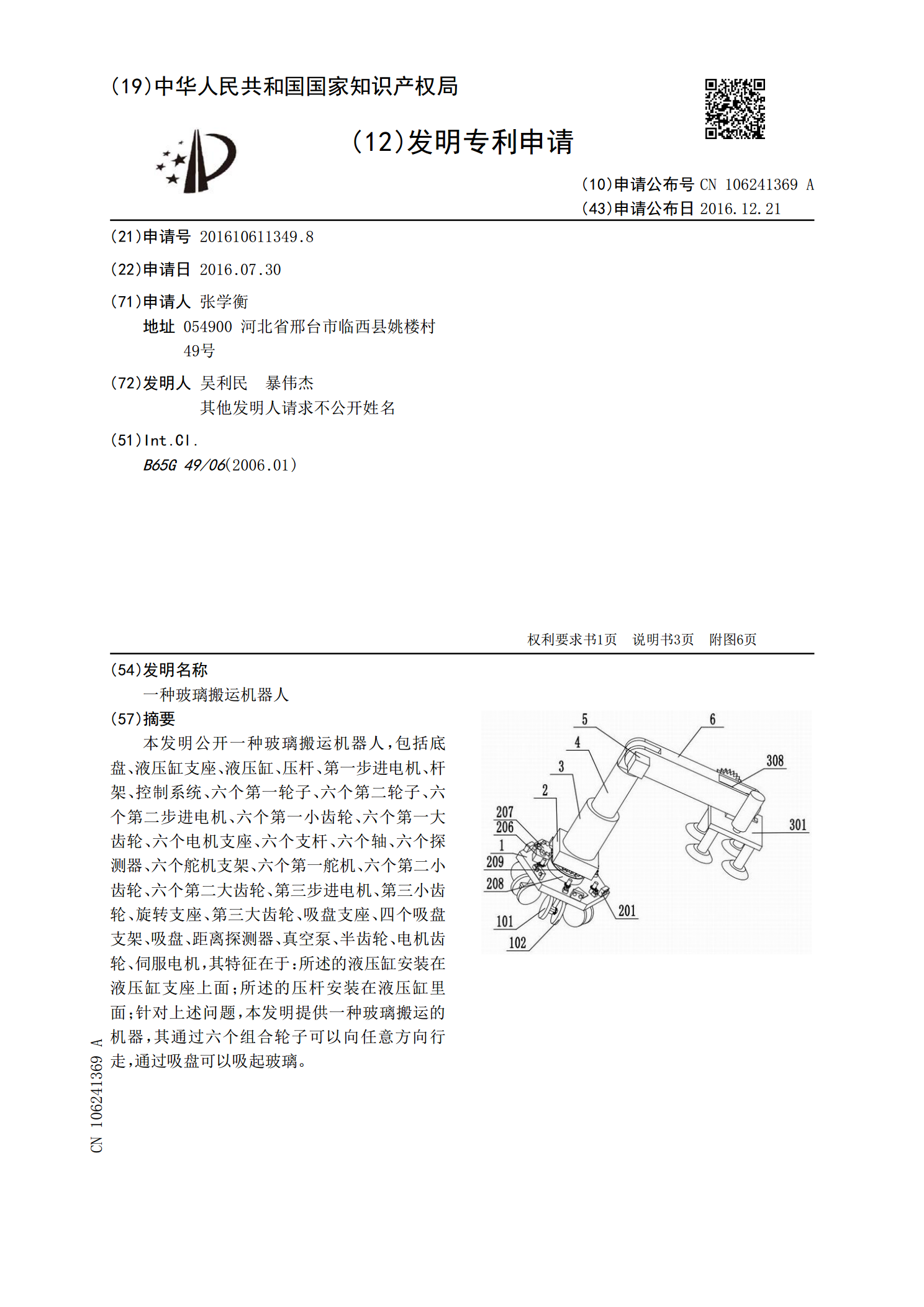
本发明公开一种玻璃搬运机器人,包括底盘、液压缸支座、液压缸、压杆、第一步进电机、杆架、控制系统、六个第一轮子、六个第二轮子、六个第二步进电机、六个第一小齿轮、六个第一大齿轮、六个电机支座、六个支杆、六个轴、六个探测器、六个舵机支架、六个第一舵机、六个第二小齿轮、六个第二大齿轮、第三步进电机、第三小齿轮、旋转支座、第三大齿轮、吸盘支座、四个吸盘支架、吸盘、距离探测器、真空泵、半齿轮、电机齿轮、伺服电机,其特征在于:所述的液压缸安装在液压缸支座上面;所述的压杆安装在液压缸里面;针对上述问题,本发明提供一种玻璃
一种玻璃搬运机器人.pdf
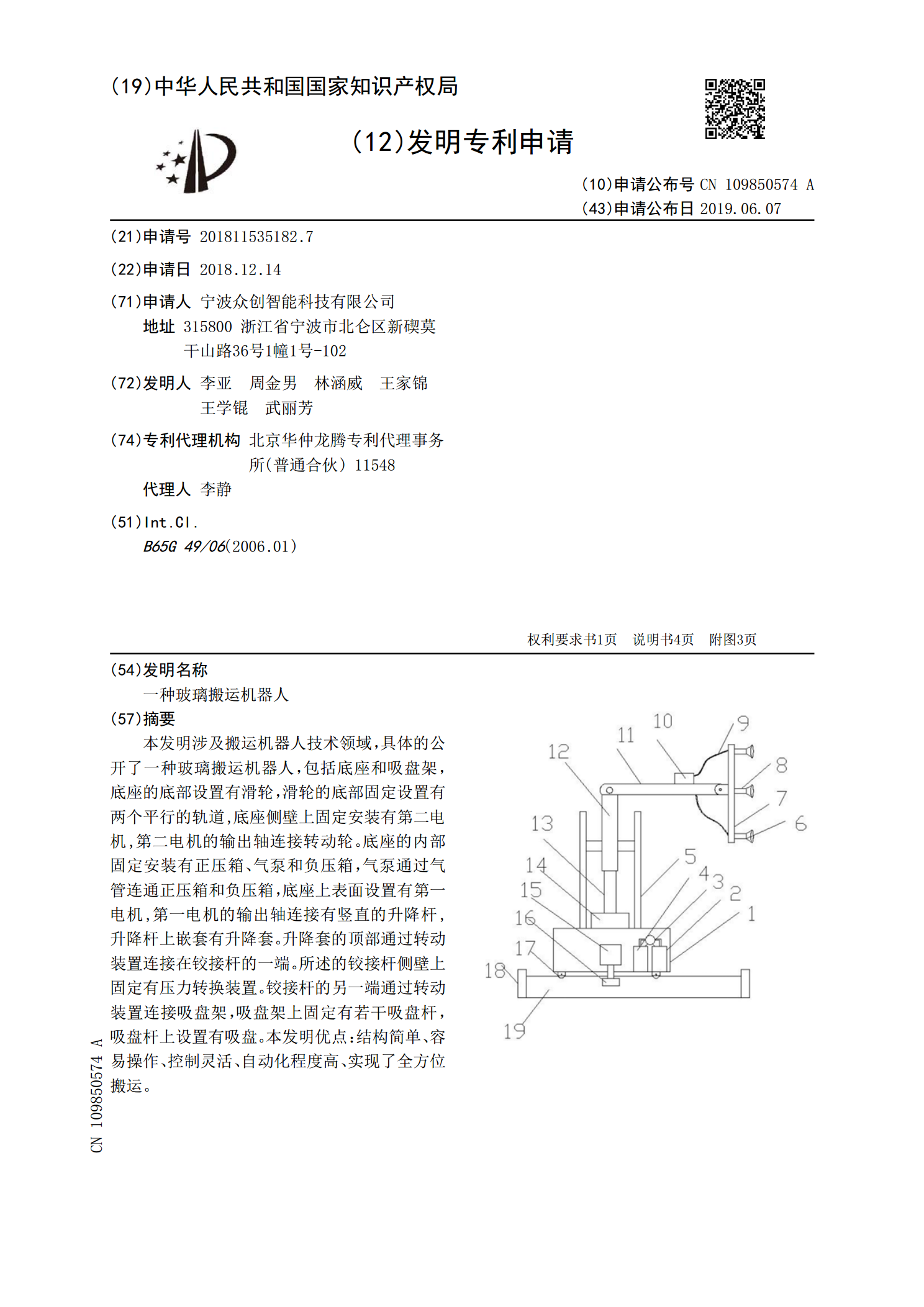
本发明涉及搬运机器人技术领域,具体的公开了一种玻璃搬运机器人,包括底座和吸盘架,底座的底部设置有滑轮,滑轮的底部固定设置有两个平行的轨道,底座侧壁上固定安装有第二电机,第二电机的输出轴连接转动轮。底座的内部固定安装有正压箱、气泵和负压箱,气泵通过气管连通正压箱和负压箱,底座上表面设置有第一电机,第一电机的输出轴连接有竖直的升降杆,升降杆上嵌套有升降套。升降套的顶部通过转动装置连接在铰接杆的一端。所述的铰接杆侧壁上固定有压力转换装置。铰接杆的另一端通过转动装置连接吸盘架,吸盘架上固定有若干吸盘杆,吸盘杆上设
一种玻璃搬运机器人.pdf
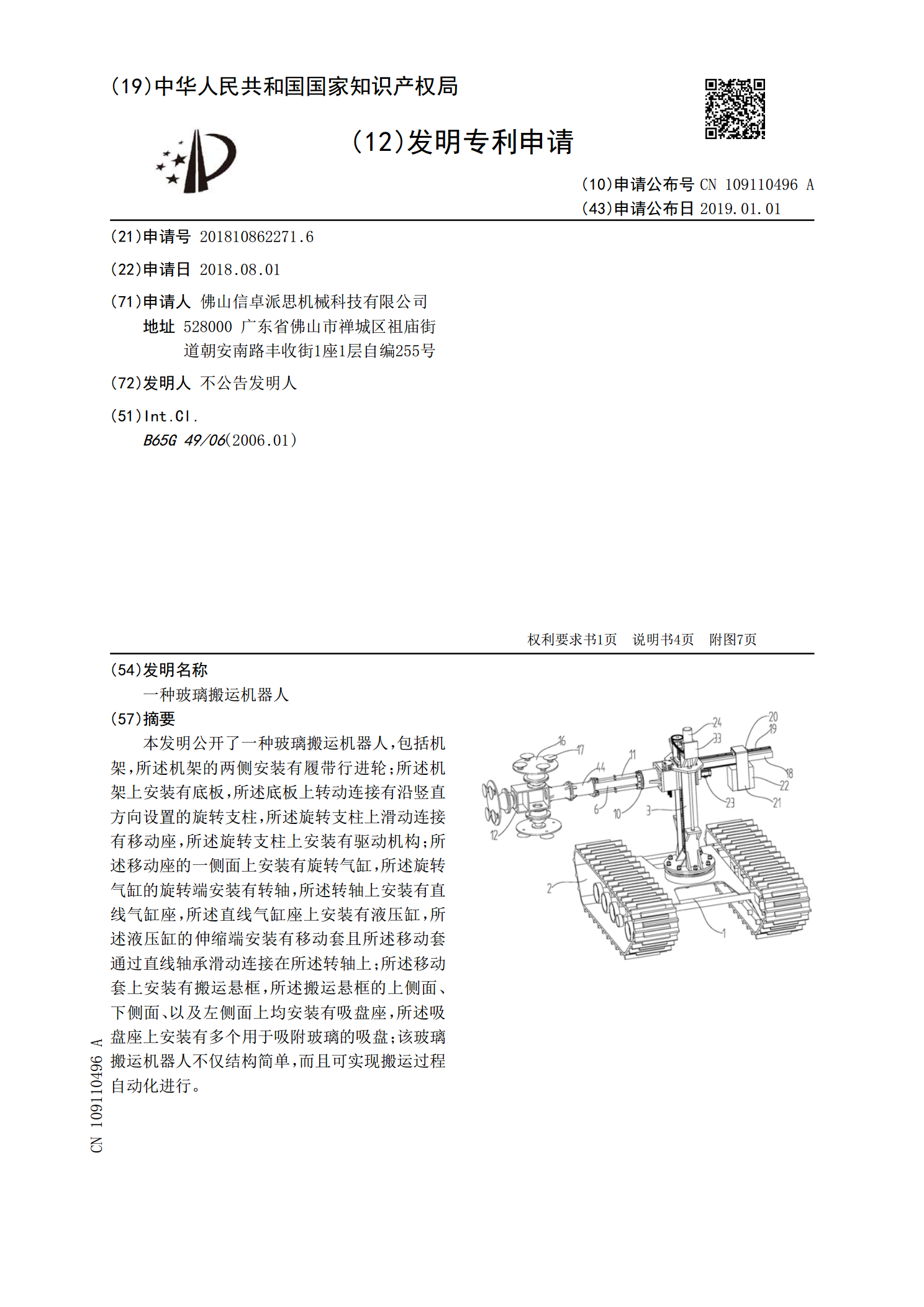
本发明公开了一种玻璃搬运机器人,包括机架,所述机架的两侧安装有履带行进轮;所述机架上安装有底板,所述底板上转动连接有沿竖直方向设置的旋转支柱,所述旋转支柱上滑动连接有移动座,所述旋转支柱上安装有驱动机构;所述移动座的一侧面上安装有旋转气缸,所述旋转气缸的旋转端安装有转轴,所述转轴上安装有直线气缸座,所述直线气缸座上安装有液压缸,所述液压缸的伸缩端安装有移动套且所述移动套通过直线轴承滑动连接在所述转轴上;所述移动套上安装有搬运悬框,所述搬运悬框的上侧面、下侧面、以及左侧面上均安装有吸盘座,所述吸盘座上安装有

玻璃搬运机器人.pptx
CLEANROOM的对应垂直多关节型机器人ArtisSH-C系列机器人外观SH133C133KG可搬6轴多关节机器人SH133CSpec.机器人外观等级最大的可搬重量、允许扭矩可搬运玻璃基板等工件至空间狭小的箱体内可搭载高刚性的抓手→最大限度的控制工件的弯曲变形・震动较大的动作范围可对应次世代的大型玻璃基板的垂直放置布局较大的手臂动作范围可实现工件各种各样的姿势可实现玻璃基板的垂直型搬运等级最大的手臂弯曲轴(B轴)可实现±135°的动作范围高性能高性能控制装置(以电脑为基础的AX控制装置)比起监视控制,震
玻璃搬运机器人及其搬运方法.pdf
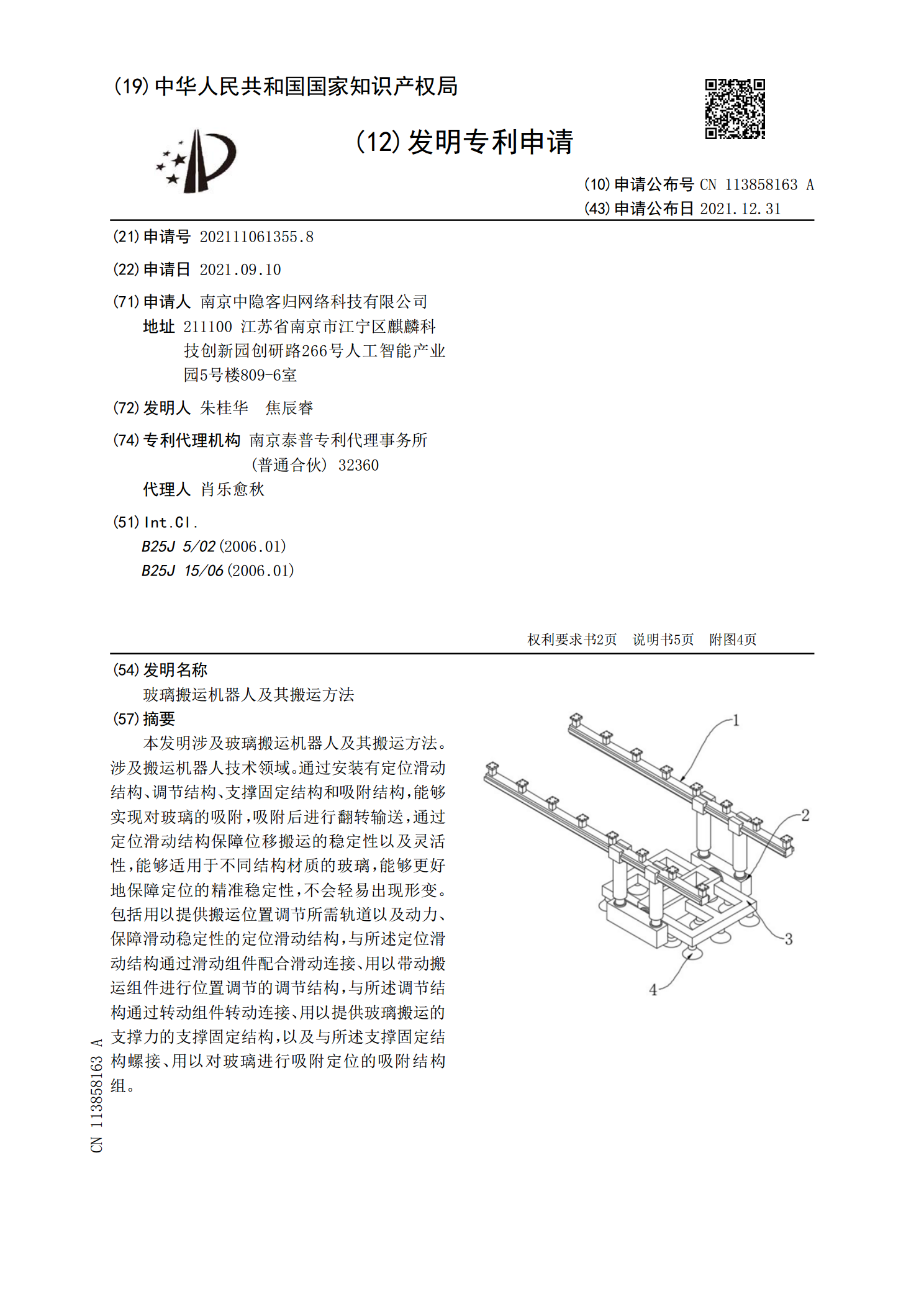
本发明涉及玻璃搬运机器人及其搬运方法。涉及搬运机器人技术领域。通过安装有定位滑动结构、调节结构、支撑固定结构和吸附结构,能够实现对玻璃的吸附,吸附后进行翻转输送,通过定位滑动结构保障位移搬运的稳定性以及灵活性,能够适用于不同结构材质的玻璃,能够更好地保障定位的精准稳定性,不会轻易出现形变。包括用以提供搬运位置调节所需轨道以及动力、保障滑动稳定性的定位滑动结构,与所述定位滑动结构通过滑动组件配合滑动连接、用以带动搬运组件进行位置调节的调节结构,与所述调节结构通过转动组件转动连接、用以提供玻璃搬运的支撑力的支