
一种管道检测清扫机器人及其控制系统.pdf

雨巷****可歆


1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种管道检测清扫机器人及其控制系统.pdf
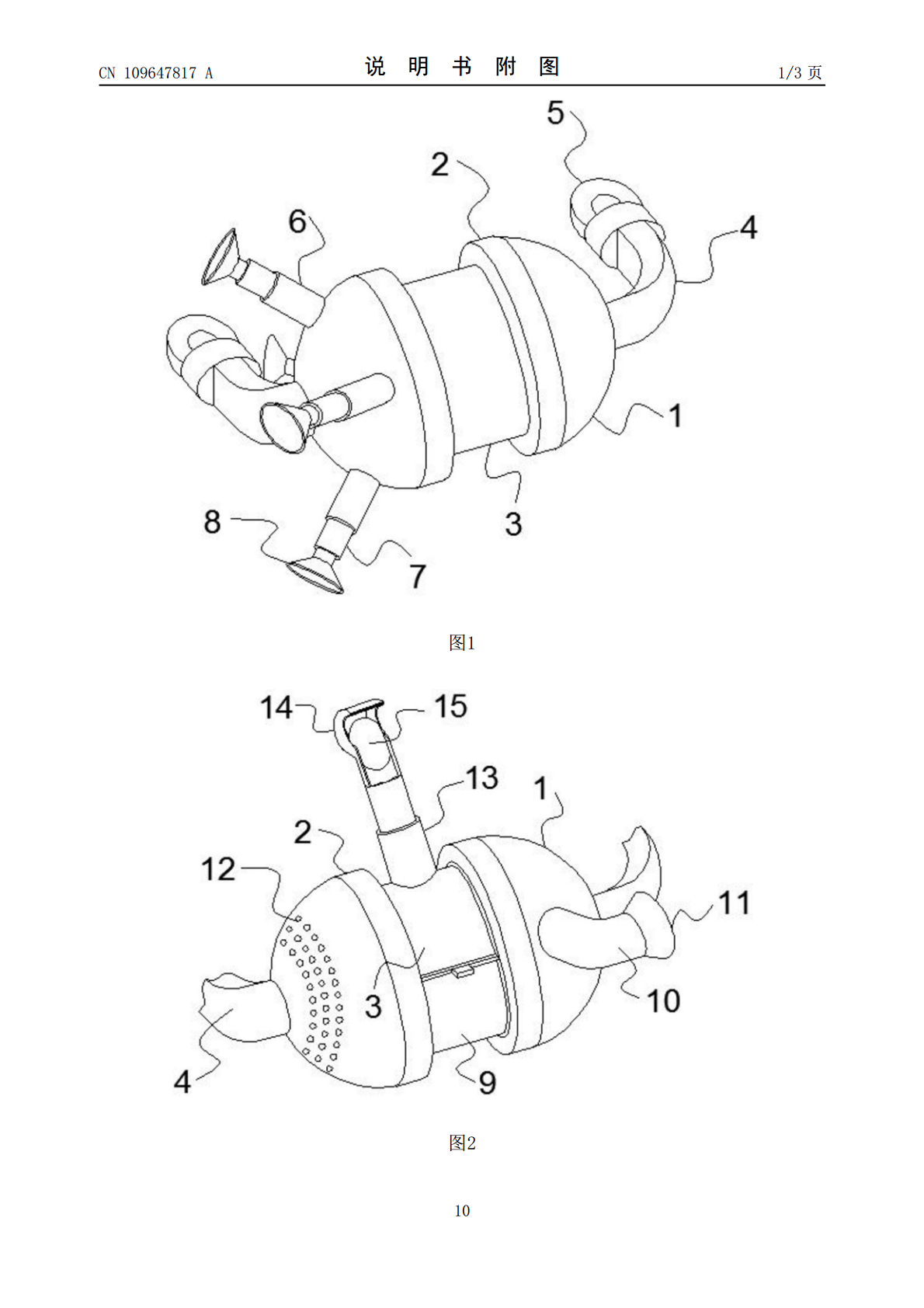
本发明涉及管道维护技术领域,具体涉及一种管道检测清扫机器人及其控制系统,包括左右对称设置的半球形壳体,左右两侧半球形壳体的相对表面均配套设有环形滑轨,且左右两侧环形滑轨之间连接有滚筒,左侧半球形壳体的左侧中央和右侧半球形壳体的右侧中央对称设有L型支撑腿,L型支撑腿的底部设有驱动轮,左侧半球形壳体环绕L型支撑腿的四周外壁均匀间隔倾斜设有支杆,支杆的倾斜方向与支杆在半球形壳体表面切线方向相垂直,且支杆的顶部设有超声波探伤传感器,超声波探伤传感器的顶部外围设有探头外壳;本发明能够有效克服现有技术所存在的传统的管

一种管道检测清扫机器人.pdf
一种管道检测清扫机器人,包括车体,车体为螺旋轮式,所述车体的前端连接接头的一端,接头的另一端连接探头组件或者清扫组件,车体的动力装置及探头组件通过电缆线连接控制系统。车体包括旋转部与支撑部,旋转部与支撑部通过万向节连接,旋转部通过支架连接主动轮,主动轮的轴心与车体的轴心的夹角小于90°,支撑部通过支架连接从动轮。和现有技术相比,本发明的有益效果为:通过电缆线控制车体的进行及作业,可以实现远程控制。另外,将清扫作业与检测作业使用一套设备,节省了成本与资源。

一种轮式管道内壁清扫检测机器人.pdf
本发明公开了一种轮式管道内壁清扫检测机器人,主要适用于管径在250‑380mm管道,包括:轴向依次连接设置的控制室、轮式行走牵引装置、清扫装置;轮式行走牵引装置包括:调节组件、前变径驱动组件;清扫装置包括:后变径驱动组件、清扫组件;控制室可拆卸的固定于轮式行走牵引装置上;轮式行走牵引装置与清扫装置柔性连接;调节组件四周设有数个前变径驱动组件,轮式行走牵引装置通过前变径驱动组件与管内壁贴合在管内行走;清扫组件四周设有数个后变径驱动组件,清扫装置通过后变径驱动组件与管内壁贴合在管内行走。本发明可以提供较大的牵
一种管道检测机器人及其检测方法.pdf
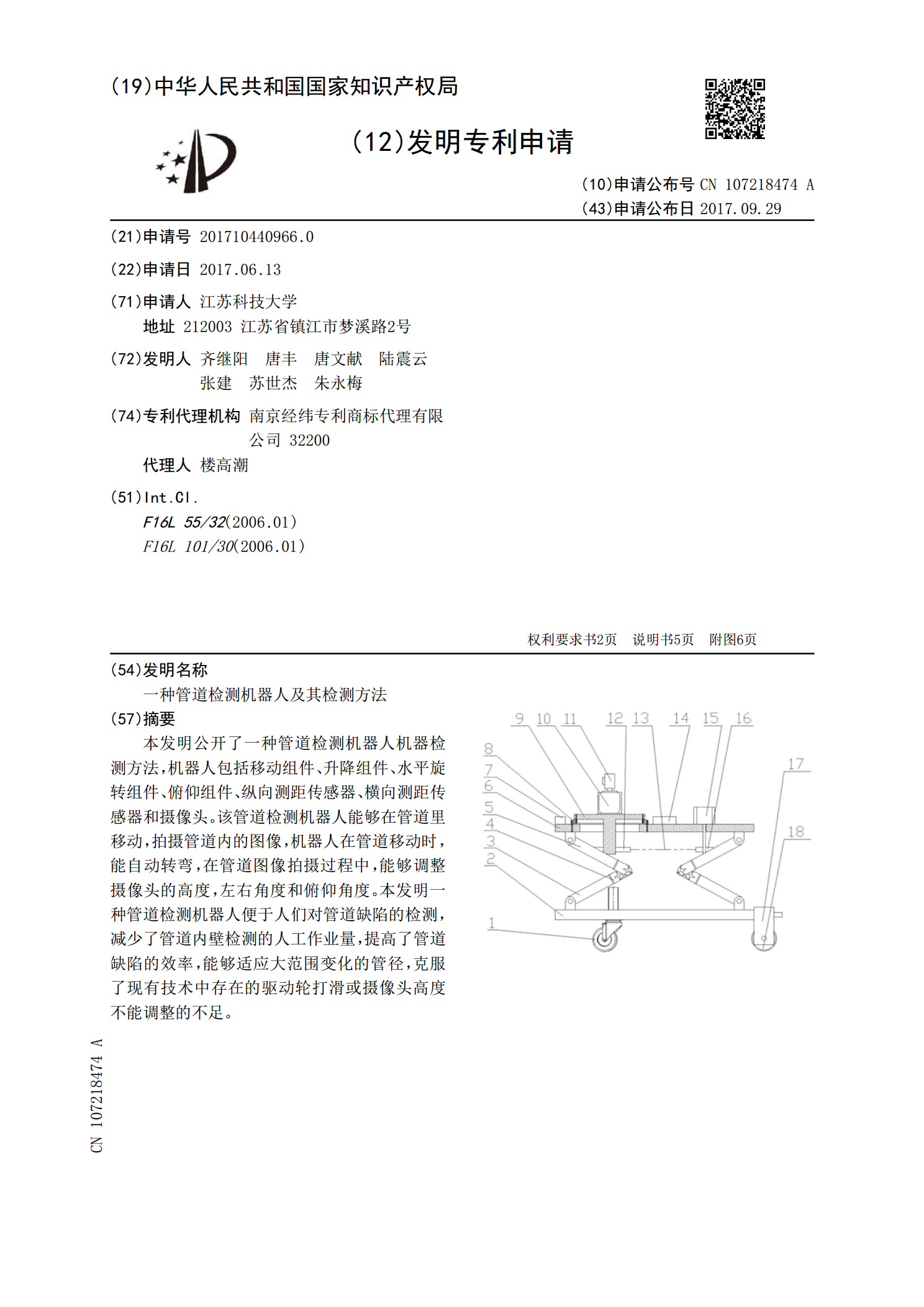
本发明公开了一种管道检测机器人机器检测方法,机器人包括移动组件、升降组件、水平旋转组件、俯仰组件、纵向测距传感器、横向测距传感器和摄像头。该管道检测机器人能够在管道里移动,拍摄管道内的图像,机器人在管道移动时,能自动转弯,在管道图像拍摄过程中,能够调整摄像头的高度,左右角度和俯仰角度。本发明一种管道检测机器人便于人们对管道缺陷的检测,减少了管道内壁检测的人工作业量,提高了管道缺陷的效率,能够适应大范围变化的管径,克服了现有技术中存在的驱动轮打滑或摄像头高度不能调整的不足。
一种管道检测机器人及其检测方法.pdf
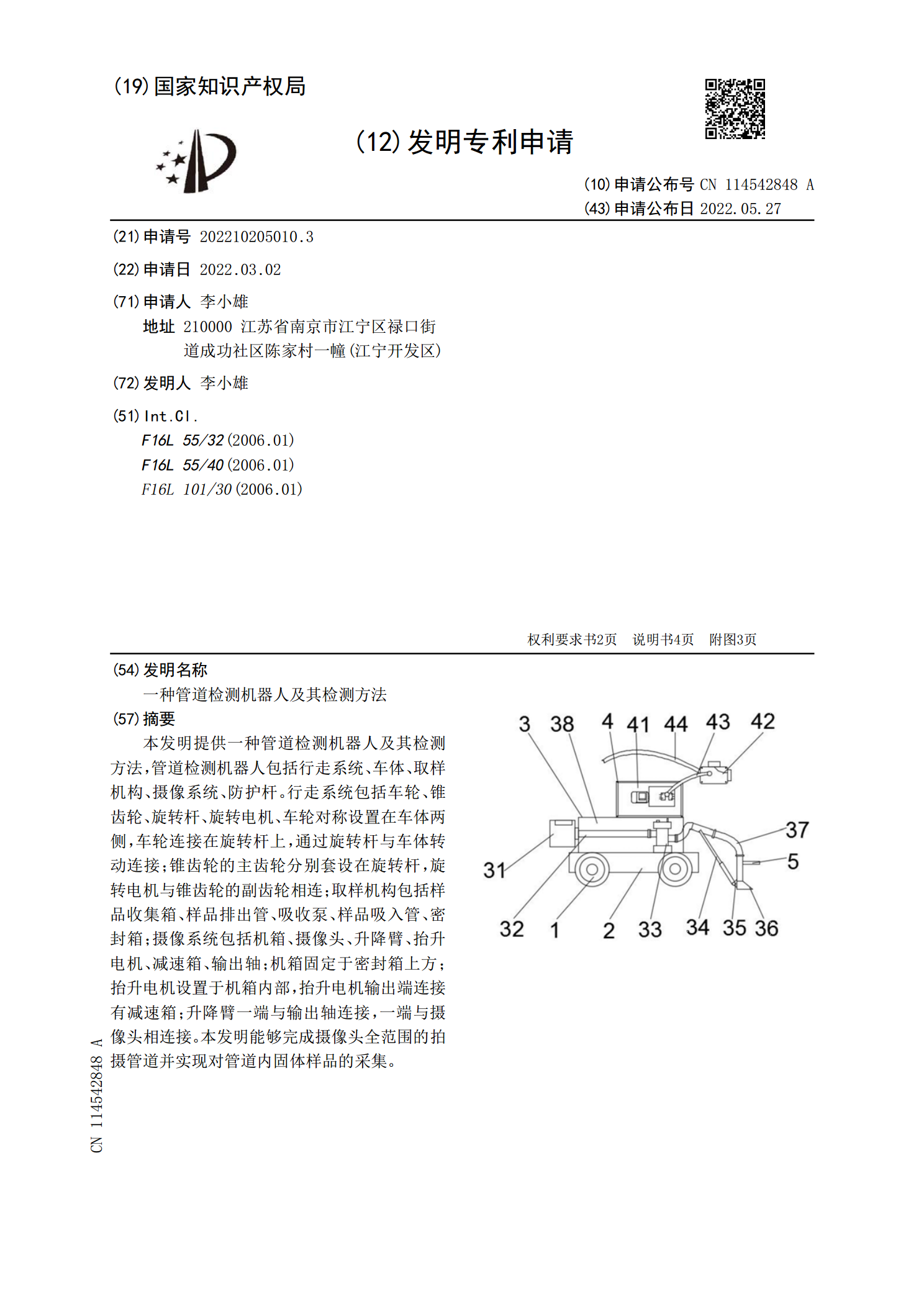
本发明提供一种管道检测机器人及其检测方法,管道检测机器人包括行走系统、车体、取样机构、摄像系统、防护杆。行走系统包括车轮、锥齿轮、旋转杆、旋转电机、车轮对称设置在车体两侧,车轮连接在旋转杆上,通过旋转杆与车体转动连接;锥齿轮的主齿轮分别套设在旋转杆,旋转电机与锥齿轮的副齿轮相连;取样机构包括样品收集箱、样品排出管、吸收泵、样品吸入管、密封箱;摄像系统包括机箱、摄像头、升降臂、抬升电机、减速箱、输出轴;机箱固定于密封箱上方;抬升电机设置于机箱内部,抬升电机输出端连接有减速箱;升降臂一端与输出轴连接,一端与摄