
一种管道检测机器人及其检测方法.pdf

森林****来了


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种管道检测机器人及其检测方法.pdf
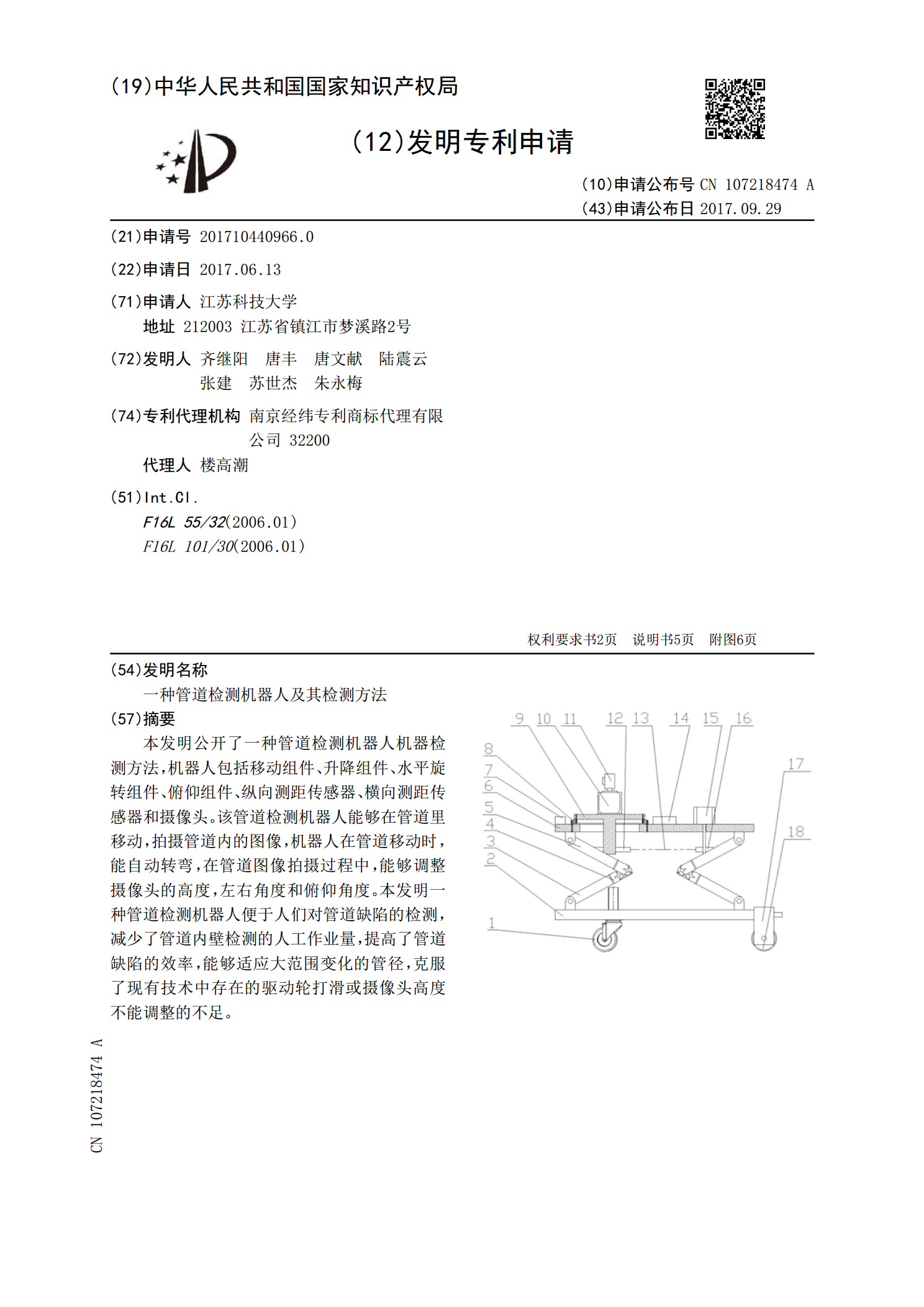
本发明公开了一种管道检测机器人机器检测方法,机器人包括移动组件、升降组件、水平旋转组件、俯仰组件、纵向测距传感器、横向测距传感器和摄像头。该管道检测机器人能够在管道里移动,拍摄管道内的图像,机器人在管道移动时,能自动转弯,在管道图像拍摄过程中,能够调整摄像头的高度,左右角度和俯仰角度。本发明一种管道检测机器人便于人们对管道缺陷的检测,减少了管道内壁检测的人工作业量,提高了管道缺陷的效率,能够适应大范围变化的管径,克服了现有技术中存在的驱动轮打滑或摄像头高度不能调整的不足。
一种管道检测机器人及其检测方法.pdf
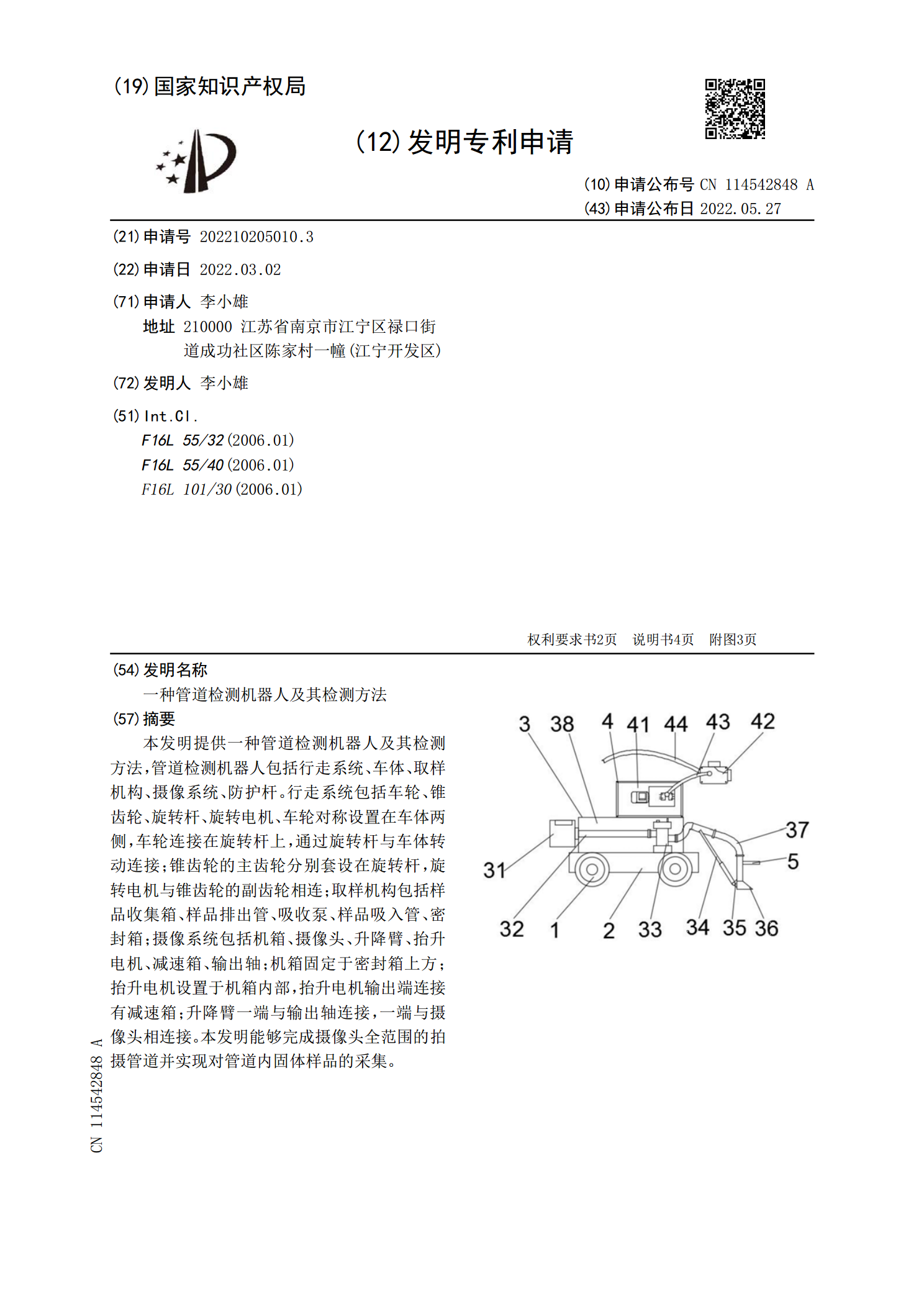
本发明提供一种管道检测机器人及其检测方法,管道检测机器人包括行走系统、车体、取样机构、摄像系统、防护杆。行走系统包括车轮、锥齿轮、旋转杆、旋转电机、车轮对称设置在车体两侧,车轮连接在旋转杆上,通过旋转杆与车体转动连接;锥齿轮的主齿轮分别套设在旋转杆,旋转电机与锥齿轮的副齿轮相连;取样机构包括样品收集箱、样品排出管、吸收泵、样品吸入管、密封箱;摄像系统包括机箱、摄像头、升降臂、抬升电机、减速箱、输出轴;机箱固定于密封箱上方;抬升电机设置于机箱内部,抬升电机输出端连接有减速箱;升降臂一端与输出轴连接,一端与摄

一种管道裂纹检测机器人及其控制方法.pdf
本发明公开了一种管道裂纹检测机器人及其控制方法,机器人包括透明的球形外壳;外壳内设置有两侧带轮子的移动平台;移动平台上设置有开关,开关与电源电性连接;电源分别与电机、控制器、微处理器电性连接;控制器与电机电性连接;控制器与微处理器双向连接,微处理器与摄像头双向连接,且微处理器与物联网云平台OneNET通信连接,物联网云平台OneNET与移动终端通信连接;控制器与加速度传感器双向连接;电机的输出轴与轮子的中心轴固接。机器人结构简单、体积较小、易于操作。

一种管道环境检测机器人及检测方法.pdf
本发明属于环境检测机器人技术领域,尤其是一种管道环境检测机器人及检测方法,包括,移动装置,设置有螺旋自驱动轮、连接轴、锥形球、连杆、支撑底板、弹力牵引绳、门环;高度调节装置,高度调节装置设置有安装仓、铰接支撑杆、第一滑槽、电动伸缩杆、凹槽板、第二滑槽;检测装置,所述检测装置设置有驱动电机、法兰盘、斜侧板、中空雷达圆台、转轴、球形槽、球形连接杆、支撑三角架、激光雷达、径向电机、平行支撑架、蜗杆、回型支撑架、蜗轮、U型支撑台、轴向电机、高清摄影机、近光灯、远光灯、气体检测传感器、温湿度传感器。该管道环境检测机

一种管道智能检测机器人及检测方法.pdf
本方案属于机器人控制技术领域,公开了一种管道智能检测机器人及检测方法,利用机器人的驱动轮的驱动技术、推进器的推动技术、自动操作技术、自动定位与跟踪探伤技术、数据处理、信号识别与自动评估技术进行检测;机器人的整体操作由上位机进行控制;通过机器人内的飞控安装的GPS系统,随时定位,并显示在上位机屏幕。本发明的机器人整体操作都由上位机进行控制;机器人内的飞控安装有GPS系统,可以随时定位,并显示与上位机屏幕上。