
一种单舵轮AGV自动插入轨迹方法及设备、存储介质.pdf

篷璐****爱吗


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种单舵轮AGV自动插入轨迹方法及设备、存储介质.pdf
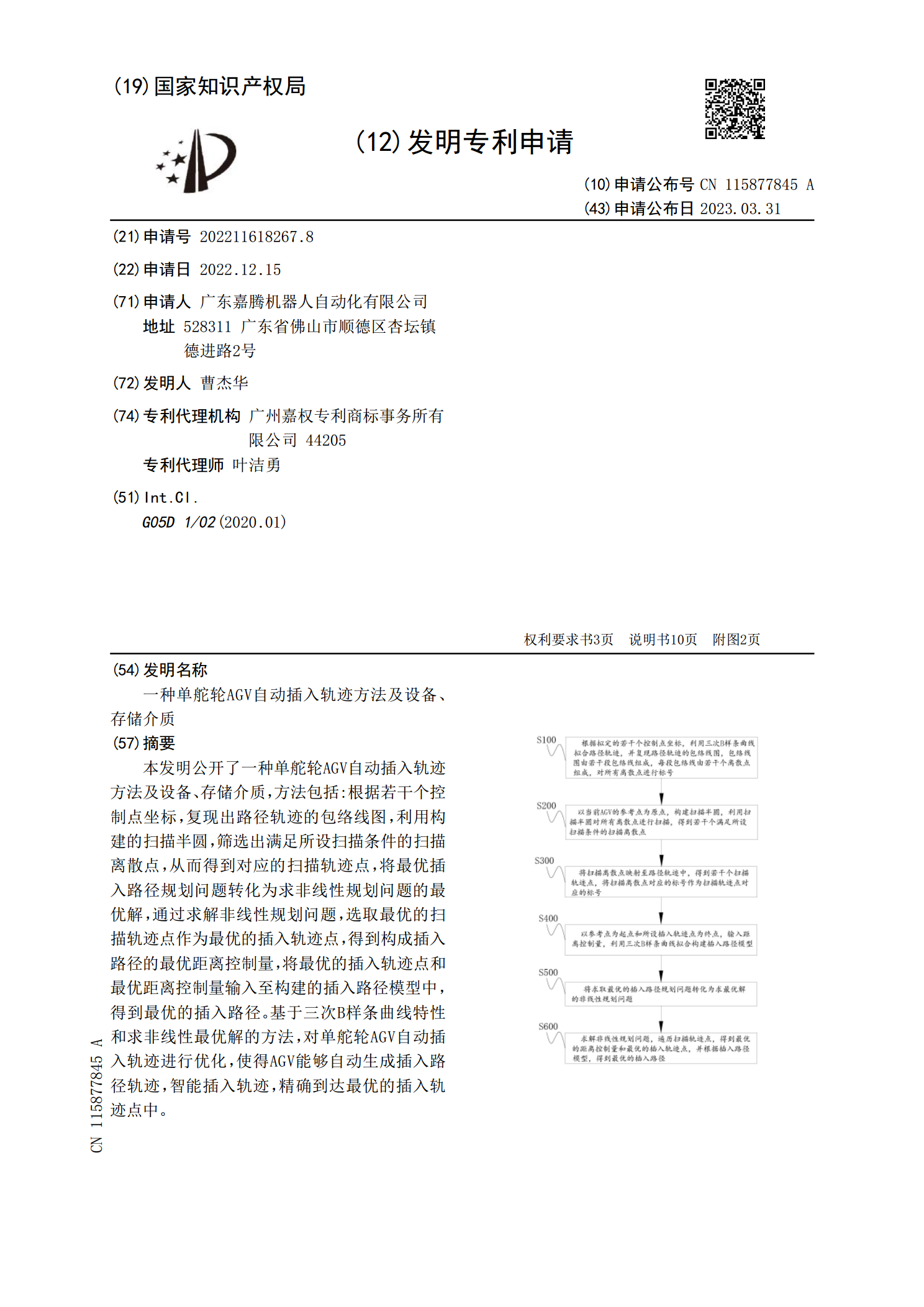
本发明公开了一种单舵轮AGV自动插入轨迹方法及设备、存储介质,方法包括:根据若干个控制点坐标,复现出路径轨迹的包络线图,利用构建的扫描半圆,筛选出满足所设扫描条件的扫描离散点,从而得到对应的扫描轨迹点,将最优插入路径规划问题转化为求非线性规划问题的最优解,通过求解非线性规划问题,选取最优的扫描轨迹点作为最优的插入轨迹点,得到构成插入路径的最优距离控制量,将最优的插入轨迹点和最优距离控制量输入至构建的插入路径模型中,得到最优的插入路径。基于三次B样条曲线特性和求非线性最优解的方法,对单舵轮AGV自动插入轨迹
一种双舵轮AGV路径跟踪控制方法及设备、存储介质.pdf
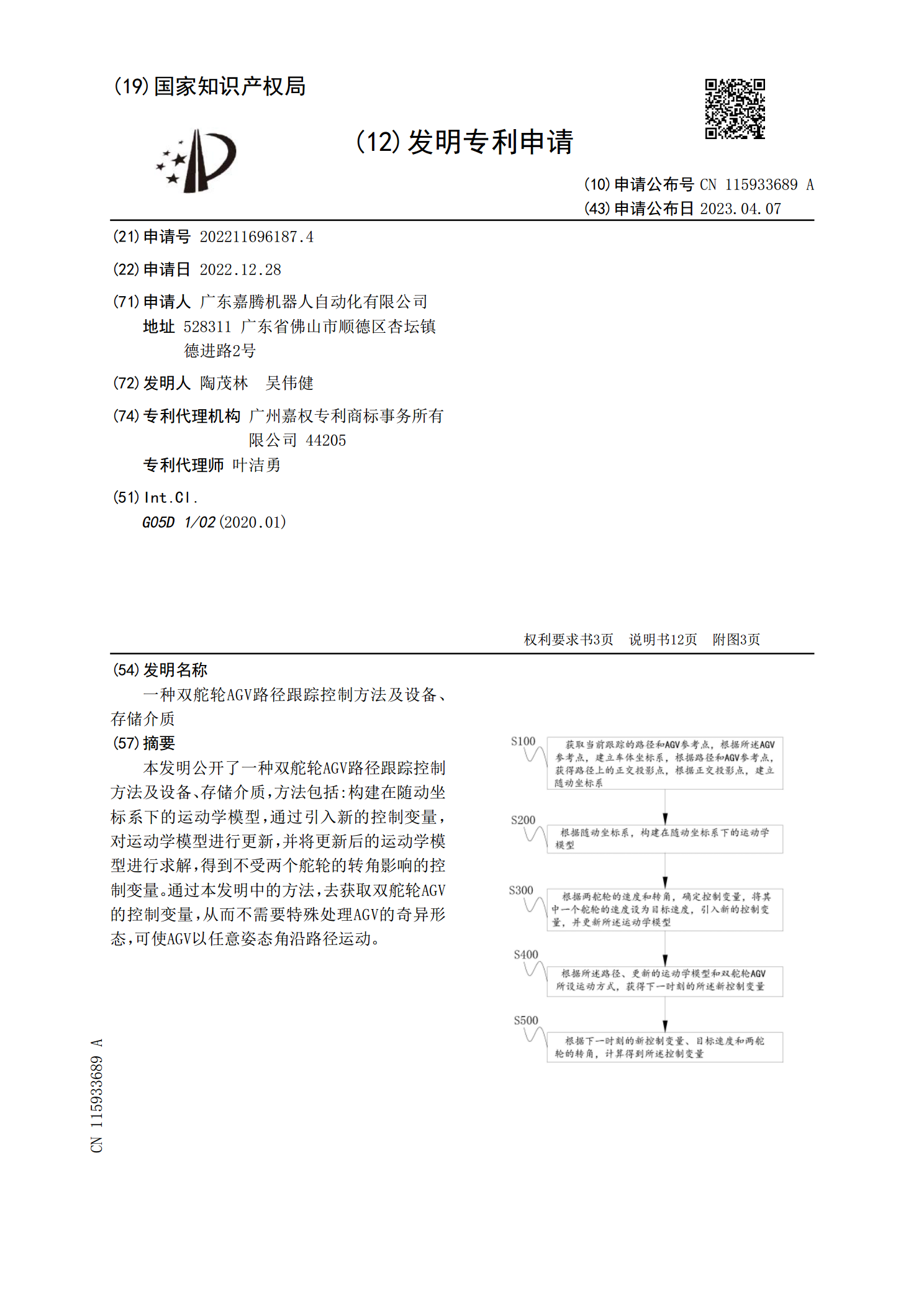
本发明公开了一种双舵轮AGV路径跟踪控制方法及设备、存储介质,方法包括:构建在随动坐标系下的运动学模型,通过引入新的控制变量,对运动学模型进行更新,并将更新后的运动学模型进行求解,得到不受两个舵轮的转角影响的控制变量。通过本发明中的方法,去获取双舵轮AGV的控制变量,从而不需要特殊处理AGV的奇异形态,可使AGV以任意姿态角沿路径运动。

单舵轮AGV点镇定控制方法及装置.pdf
本发明提供了一种单舵轮AGV点镇定控制方法及装置,涉及AGV控制技术领域。所述方法包括:获取AGV的当前位姿及目标位姿;根据当前位姿及目标位姿计算位姿偏差;基于第一控制律使AGV移动至经过目标点且指向目标方向的直线上;基于第二控制律使AGV跟随所述指向目标方向直线向目标点移动直至到达目标点。本发明通过减少控制参数简化控制方法,能够实现任一型单舵轮AGV从全局坐标系中的任一初始位姿镇定到任一目标位姿,可有效解决诸如无人叉车的定点泊车等问题,本发明提供的控制方法简单、调试方便,且运动平稳、通用性强,有较高的实
一种四舵轮AGV舵轮失效容错控制方法.pdf
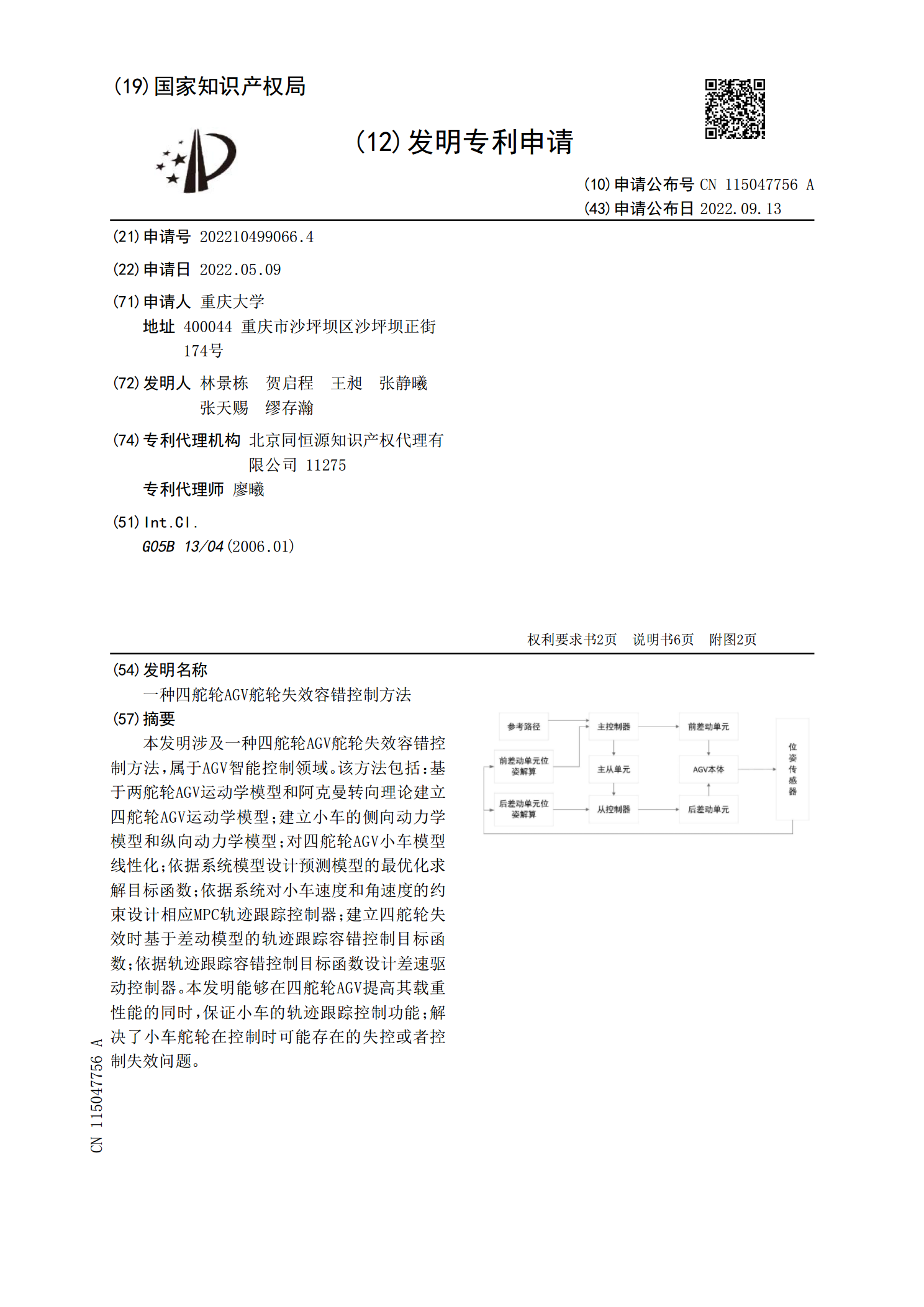
本发明涉及一种四舵轮AGV舵轮失效容错控制方法,属于AGV智能控制领域。该方法包括:基于两舵轮AGV运动学模型和阿克曼转向理论建立四舵轮AGV运动学模型;建立小车的侧向动力学模型和纵向动力学模型;对四舵轮AGV小车模型线性化;依据系统模型设计预测模型的最优化求解目标函数;依据系统对小车速度和角速度的约束设计相应MPC轨迹跟踪控制器;建立四舵轮失效时基于差动模型的轨迹跟踪容错控制目标函数;依据轨迹跟踪容错控制目标函数设计差速驱动控制器。本发明能够在四舵轮AGV提高其载重性能的同时,保证小车的轨迹跟踪控制功能

一种车辆轨迹还原方法、设备及存储介质.pdf
本申请实施例提供一种车辆轨迹还原方法、设备及存储介质。在本申请实施例中,可利用已有的位置感知设备对车辆进行位置感知,根据感知到的车辆的位置信息,可动态维护目标路口各条驶入车道上的行驶车队;可按照目标路口的通行控制信号对行驶车队进行模拟通行控制,从而确定行驶车队中的车辆在位置感知设备的感知盲区内的行驶参数,进而还原车辆在所述感知盲区内的车辆轨迹。这样,本申请实施例中,可利用位置感知设备确定车辆在感知区域内的车辆轨迹;还可通过对车辆所在车队进行模拟通信控制,预测车辆在感知盲区内的车辆轨迹,从而组合产生车辆的完