
一种基于优化对准的SINS/DVL安装误差角标校方法.pdf

增梅****主啊

1/10

2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于优化对准的SINS/DVL安装误差角标校方法.pdf
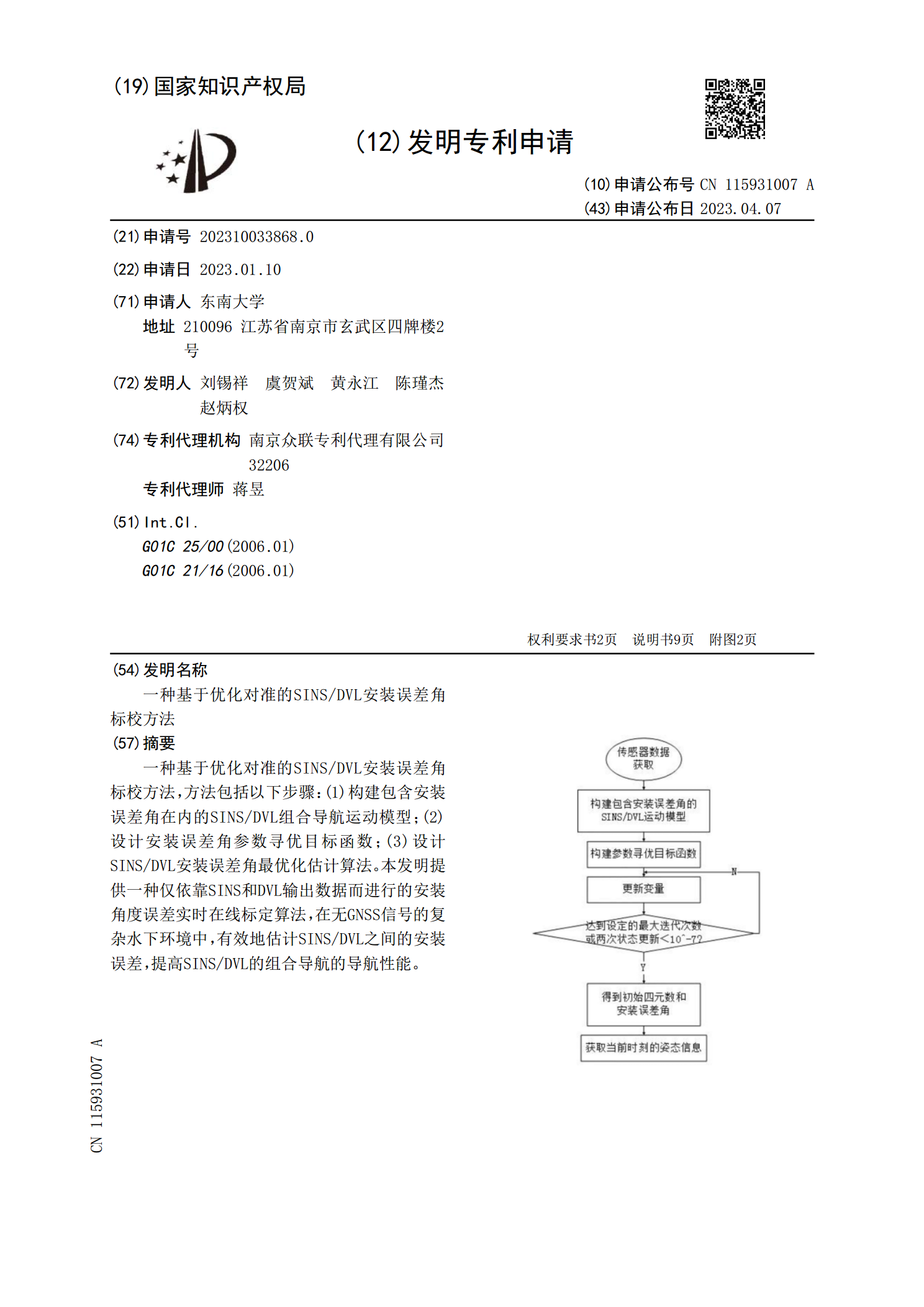
一种基于优化对准的SINS/DVL安装误差角标校方法,方法包括以下步骤:(1)构建包含安装误差角在内的SINS/DVL组合导航运动模型;(2)设计安装误差角参数寻优目标函数;(3)设计SINS/DVL安装误差角最优化估计算法。本发明提供一种仅依靠SINS和DVL输出数据而进行的安装角度误差实时在线标定算法,在无GNSS信号的复杂水下环境中,有效地估计SINS/DVL之间的安装误差,提高SINS/DVL的组合导航的导航性能。
基于粒子群优化鲁棒滤波的SINSDVL导航方法.pdf
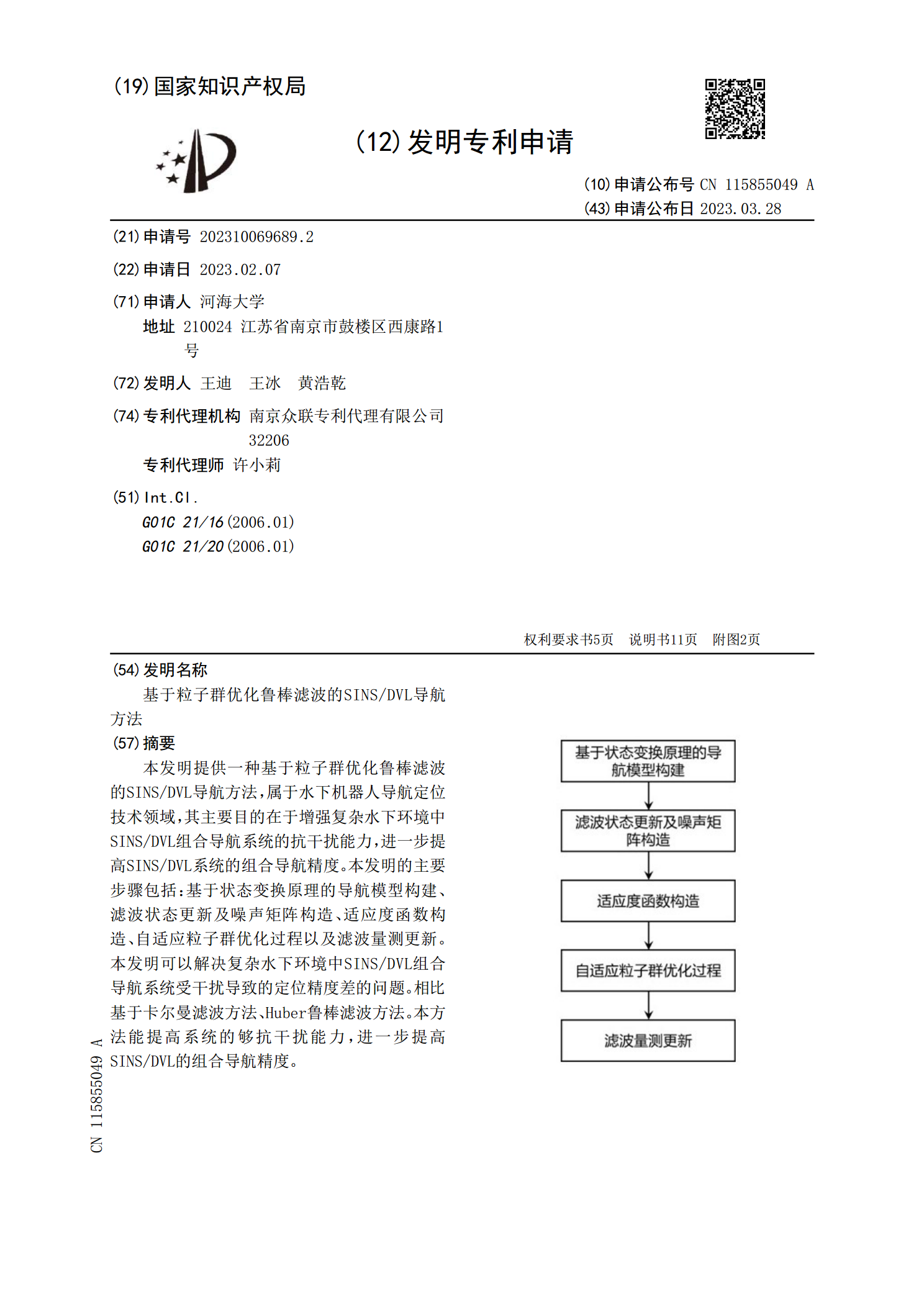
本发明提供一种基于粒子群优化鲁棒滤波的SINS/DVL导航方法,属于水下机器人导航定位技术领域,其主要目的在于增强复杂水下环境中SINS/DVL组合导航系统的抗干扰能力,进一步提高SINS/DVL系统的组合导航精度。本发明的主要步骤包括:基于状态变换原理的导航模型构建、滤波状态更新及噪声矩阵构造、适应度函数构造、自适应粒子群优化过程以及滤波量测更新。本发明可以解决复杂水下环境中SINS/DVL组合导航系统受干扰导致的定位精度差的问题。相比基于卡尔曼滤波方法、Huber鲁棒滤波方法。本方法能提高系统的够抗干
一种线激光安装误差角确定方法.pdf
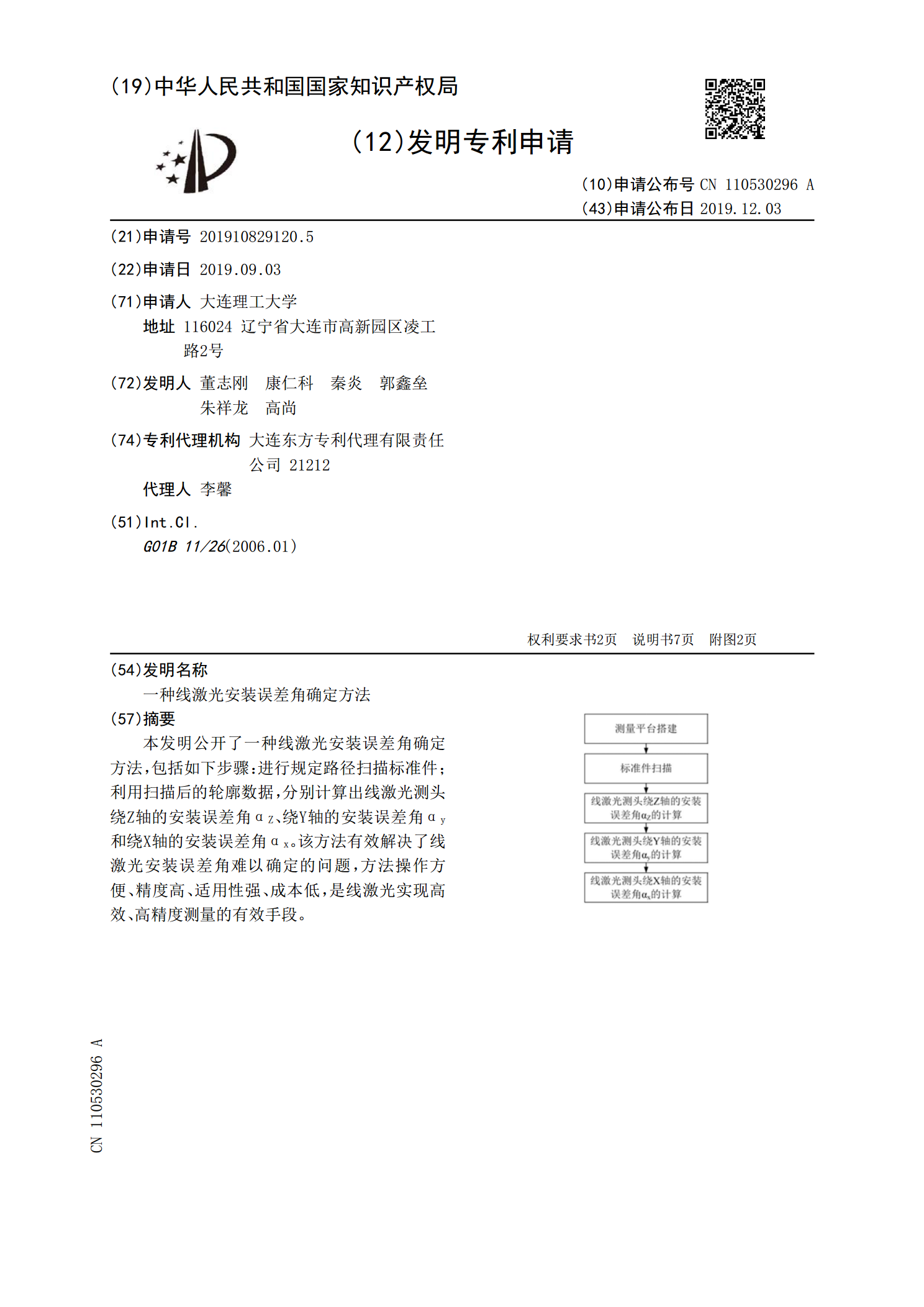
本发明公开了一种线激光安装误差角确定方法,包括如下步骤:进行规定路径扫描标准件;利用扫描后的轮廓数据,分别计算出线激光测头绕Z轴的安装误差角α
一种光栅干涉仪对准误差实时校正方法.pdf
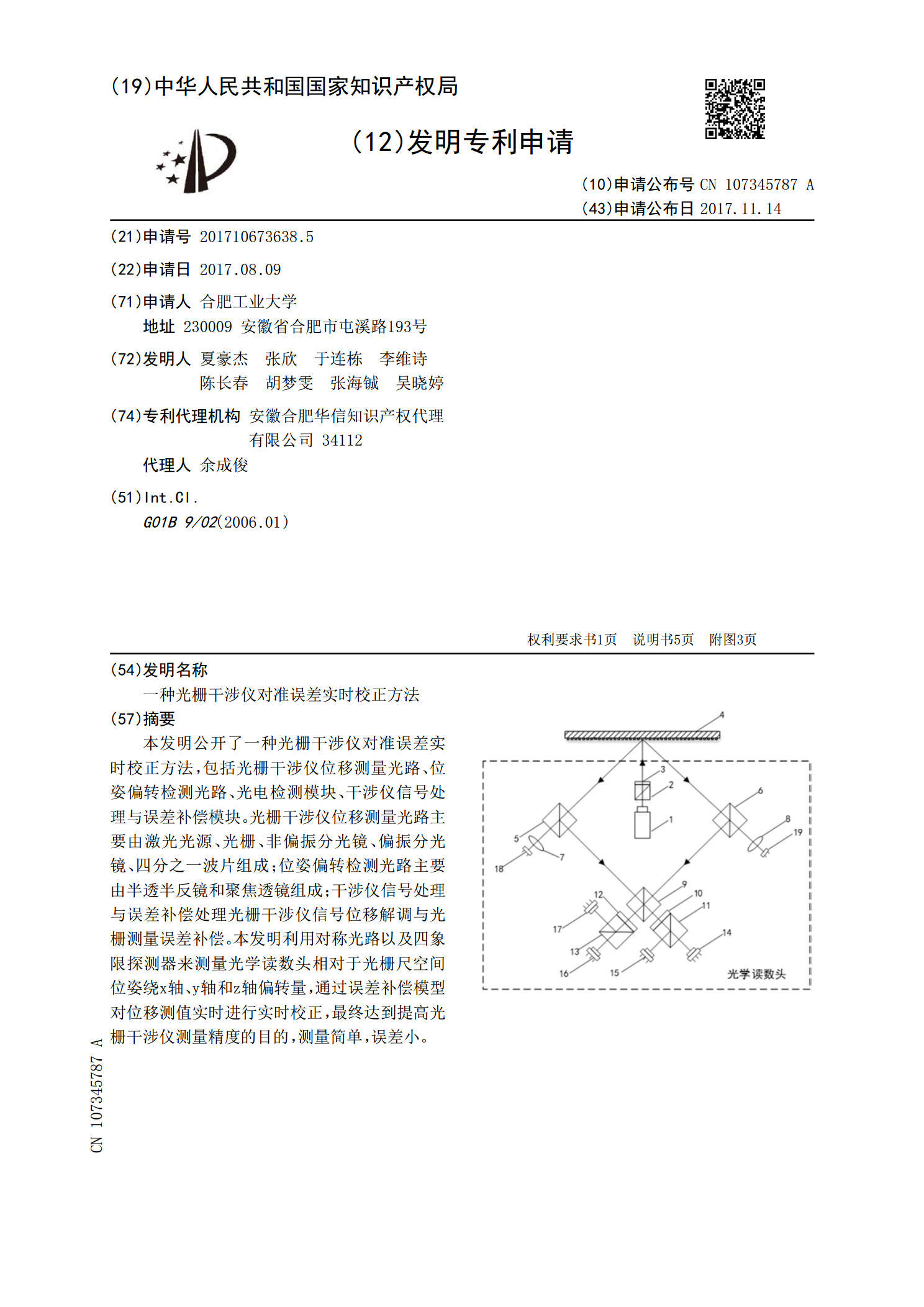
本发明公开了一种光栅干涉仪对准误差实时校正方法,包括光栅干涉仪位移测量光路、位姿偏转检测光路、光电检测模块、干涉仪信号处理与误差补偿模块。光栅干涉仪位移测量光路主要由激光光源、光栅、非偏振分光镜、偏振分光镜、四分之一波片组成;位姿偏转检测光路主要由半透半反镜和聚焦透镜组成;干涉仪信号处理与误差补偿处理光栅干涉仪信号位移解调与光栅测量误差补偿。本发明利用对称光路以及四象限探测器来测量光学读数头相对于光栅尺空间位姿绕x轴、y轴和z轴偏转量,通过误差补偿模型对位移测值实时进行实时校正,最终达到提高光栅干涉仪测量
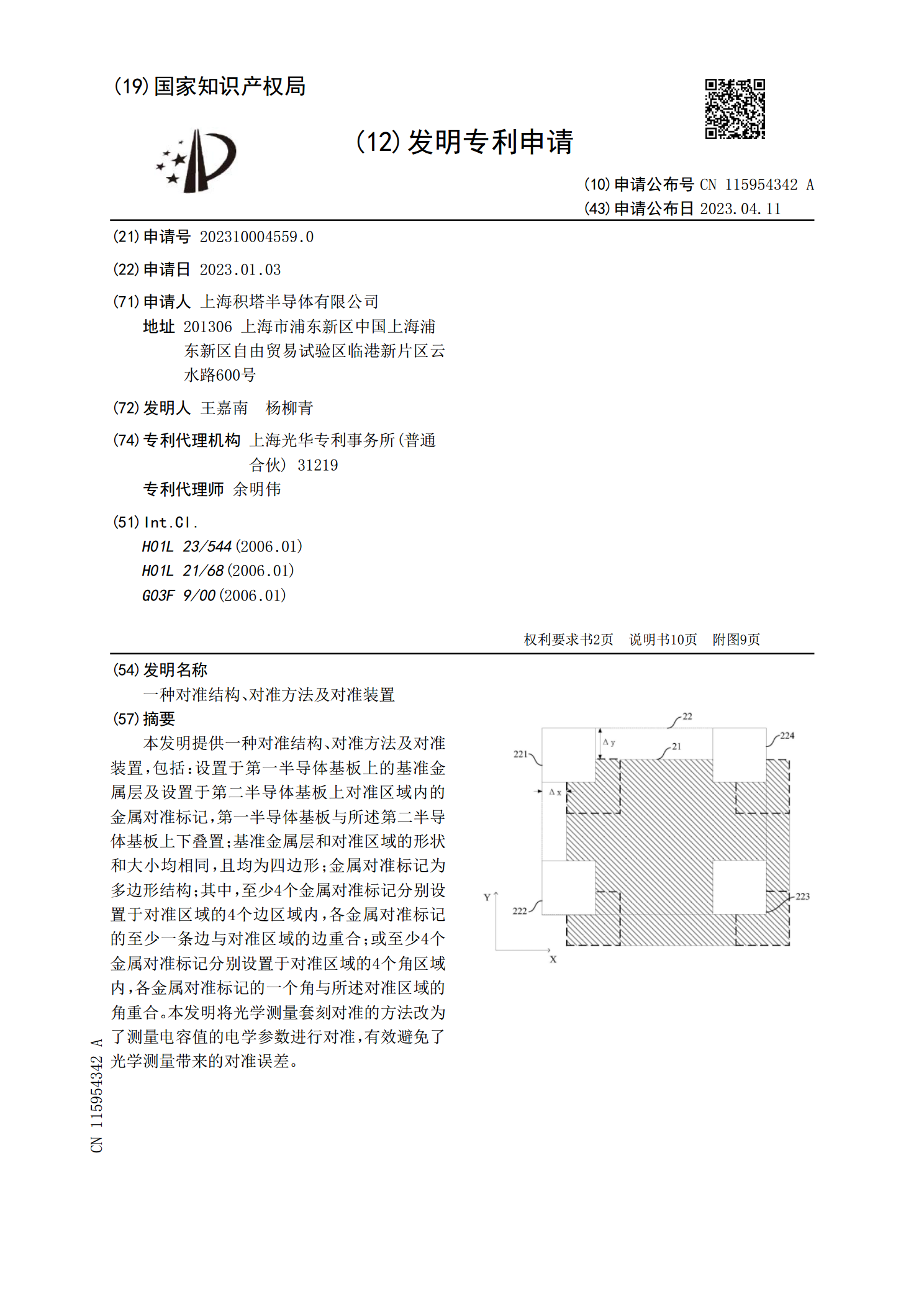
一种对准结构、对准方法及对准装置.pdf
本发明提供一种对准结构、对准方法及对准装置,包括:设置于第一半导体基板上的基准金属层及设置于第二半导体基板上对准区域内的金属对准标记,第一半导体基板与所述第二半导体基板上下叠置;基准金属层和对准区域的形状和大小均相同,且均为四边形;金属对准标记为多边形结构;其中,至少4个金属对准标记分别设置于对准区域的4个边区域内,各金属对准标记的至少一条边与对准区域的边重合;或至少4个金属对准标记分别设置于对准区域的4个角区域内,各金属对准标记的一个角与所述对准区域的角重合。本发明将光学测量套刻对准的方法改为了测量电容