
基于粒子群优化鲁棒滤波的SINSDVL导航方法.pdf

mm****酱吖


1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于粒子群优化鲁棒滤波的SINSDVL导航方法.pdf
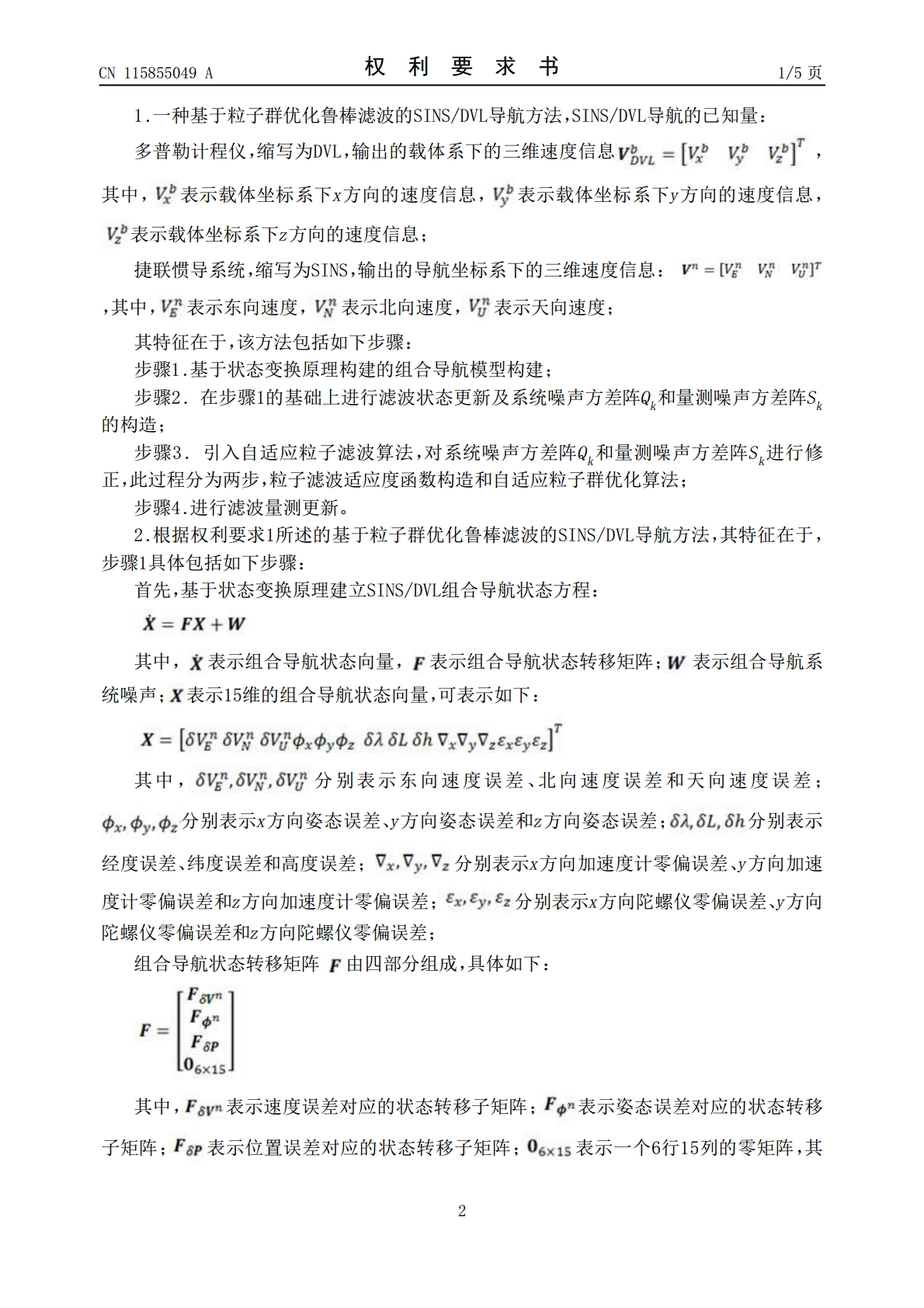
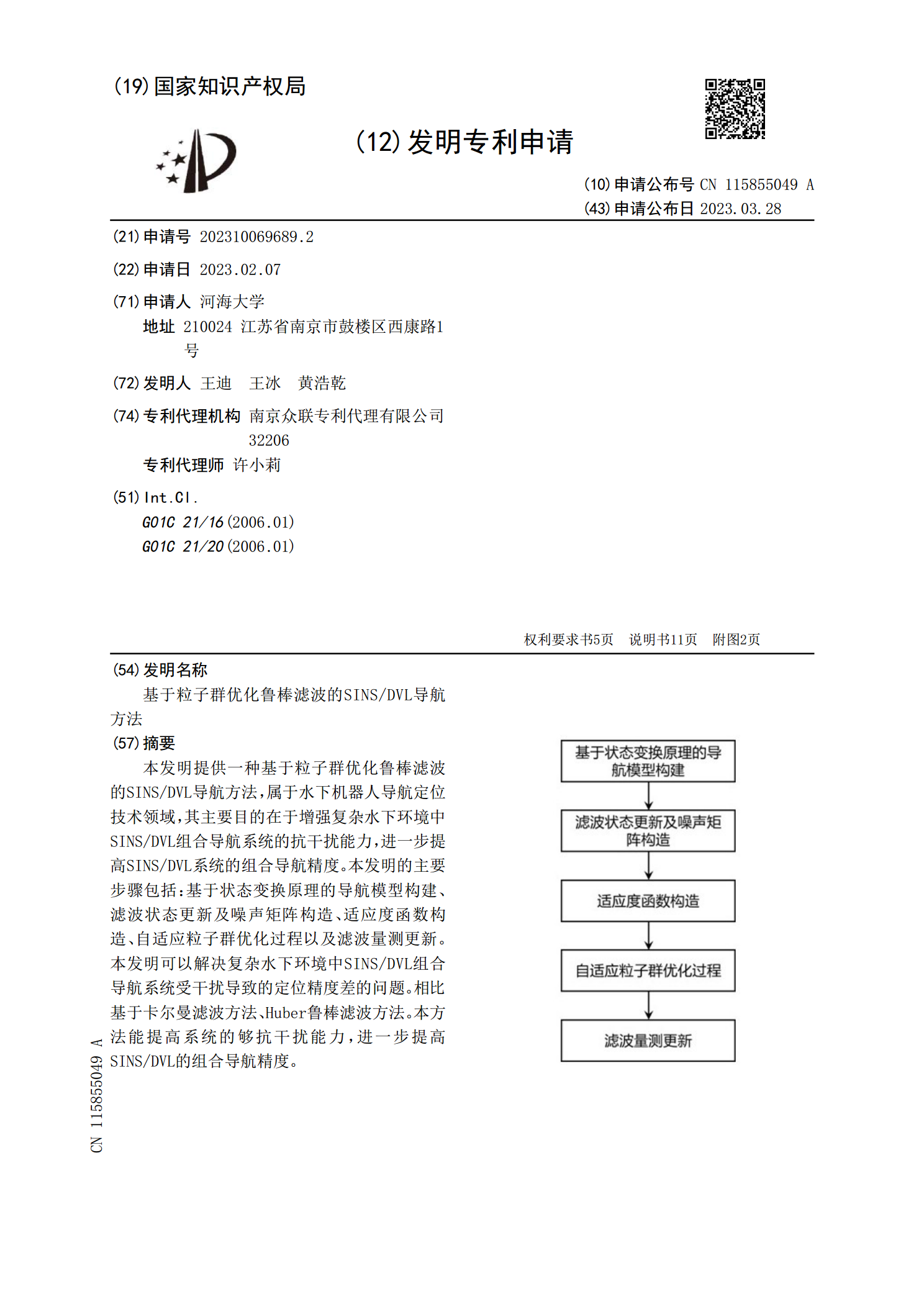
本发明提供一种基于粒子群优化鲁棒滤波的SINS/DVL导航方法,属于水下机器人导航定位技术领域,其主要目的在于增强复杂水下环境中SINS/DVL组合导航系统的抗干扰能力,进一步提高SINS/DVL系统的组合导航精度。本发明的主要步骤包括:基于状态变换原理的导航模型构建、滤波状态更新及噪声矩阵构造、适应度函数构造、自适应粒子群优化过程以及滤波量测更新。本发明可以解决复杂水下环境中SINS/DVL组合导航系统受干扰导致的定位精度差的问题。相比基于卡尔曼滤波方法、Huber鲁棒滤波方法。本方法能提高系统的够抗干

基于新息的SINSDVL组合导航自适应滤波算法.docx
基于新息的SINSDVL组合导航自适应滤波算法基于新息的SINSDVL组合导航自适应滤波算法摘要:全球卫星导航系统(GNSS)的普及和应用,为导航系统提供了高精度、高可靠性的定位服务。但是,GNSS在复杂环境下的定位精度容易受到多径效应、信号衰退和干扰等因素的影响,从而导致导航系统的性能下降。为了解决这些问题,本文提出了一种基于新息的SINSDVL组合导航自适应滤波算法,该算法利用多源信息融合的方法对GNSS定位进行优化。关键词:全球卫星导航系统;多径效应;信号衰退;干扰;SINSDVL;自适应滤波算法1

基于改进自适应滤波的SINSDVL组合导航算法研究.docx
基于改进自适应滤波的SINSDVL组合导航算法研究基于改进自适应滤波的SINSDVL组合导航算法研究摘要:随着航空航天技术的发展,组合导航系统在航空航天、自动化驾驶等领域扮演着重要的角色。SINSDVL组合导航算法是一种常见的组合导航算法,在滤波器设计方面有一定的缺陷。本文针对该问题,提出了一种改进的自适应滤波的SINSDVL组合导航算法,并对该算法进行了理论分析和实验验证。实验结果表明,该算法能够有效地提高组合导航系统的精度和稳定性,具有较好的应用前景。1.引言组合导航是指利用多种导航传感器信息,在进行
一种基于统计相似度量的组合导航鲁棒滤波方法.pdf
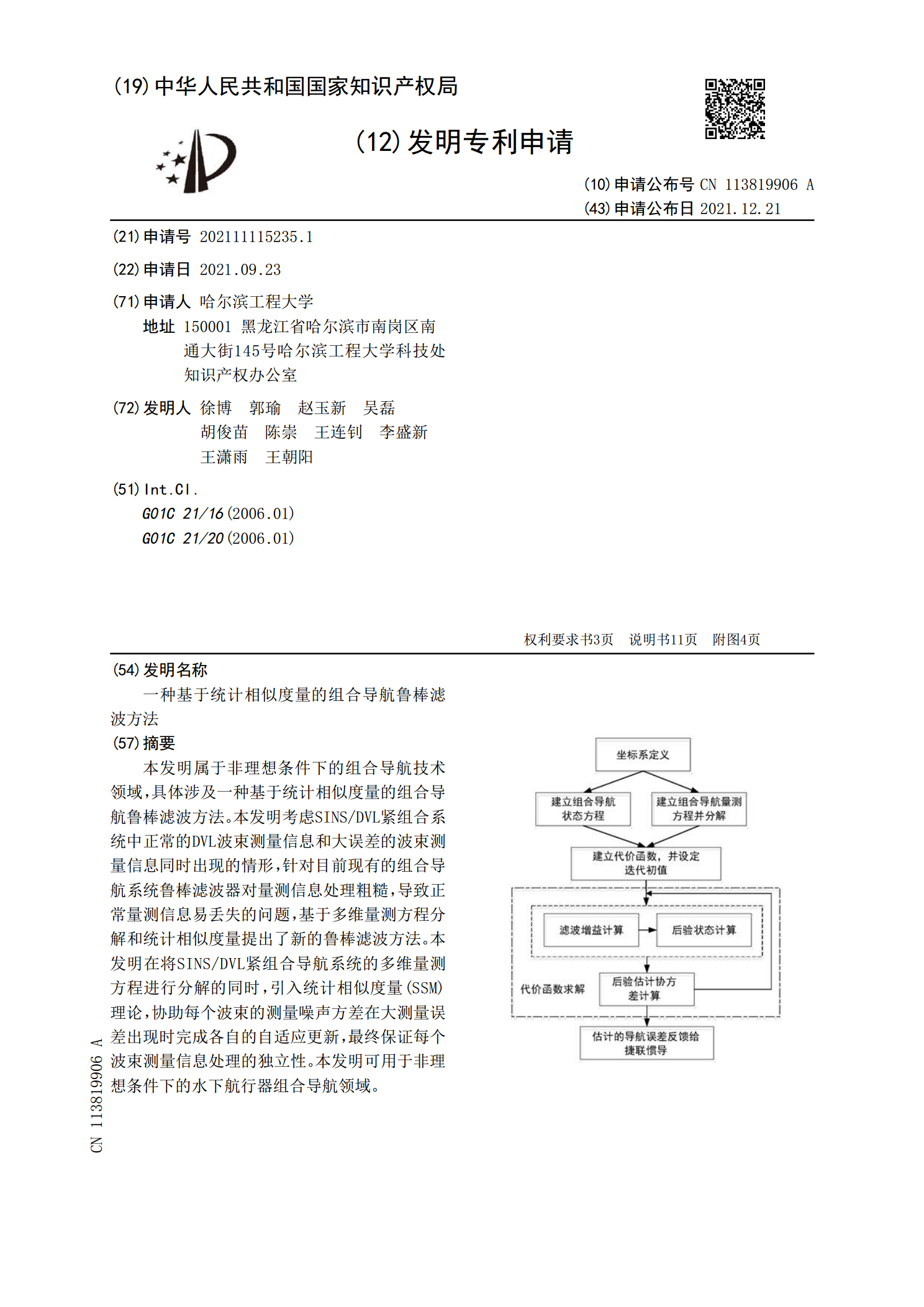
本发明属于非理想条件下的组合导航技术领域,具体涉及一种基于统计相似度量的组合导航鲁棒滤波方法。本发明考虑SINS/DVL紧组合系统中正常的DVL波束测量信息和大误差的波束测量信息同时出现的情形,针对目前现有的组合导航系统鲁棒滤波器对量测信息处理粗糙,导致正常量测信息易丢失的问题,基于多维量测方程分解和统计相似度量提出了新的鲁棒滤波方法。本发明在将SINS/DVL紧组合导航系统的多维量测方程进行分解的同时,引入统计相似度量(SSM)理论,协助每个波束的测量噪声方差在大测量误差出现时完成各自的自适应更新,最终

基于鲁棒滤波的无人机着陆相对导航方法.docx
基于鲁棒滤波的无人机着陆相对导航方法基于鲁棒滤波的无人机着陆相对导航方法摘要:无人机作为一种重要的航空器,其着陆过程需要精确的相对导航方法来确保安全和准确性。本论文提出一种基于鲁棒滤波的无人机着陆相对导航方法,该方法可以提高无人机在恶劣条件下的导航性能并提供可靠的着陆精度。通过对无人机着陆过程中的传感器数据进行鲁棒滤波处理,可以有效减小传感器噪声和系统不确定性对导航结果的影响。实验结果表明,该方法具有较高的稳定性和精确性,适用于复杂环境下的无人机着陆导航。关键词:无人机;相对导航;鲁棒滤波;着陆精度1.引