
一种线激光安装误差角确定方法.pdf

是你****松呀

1/10

2/10

3/10
4/10

5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种线激光安装误差角确定方法.pdf
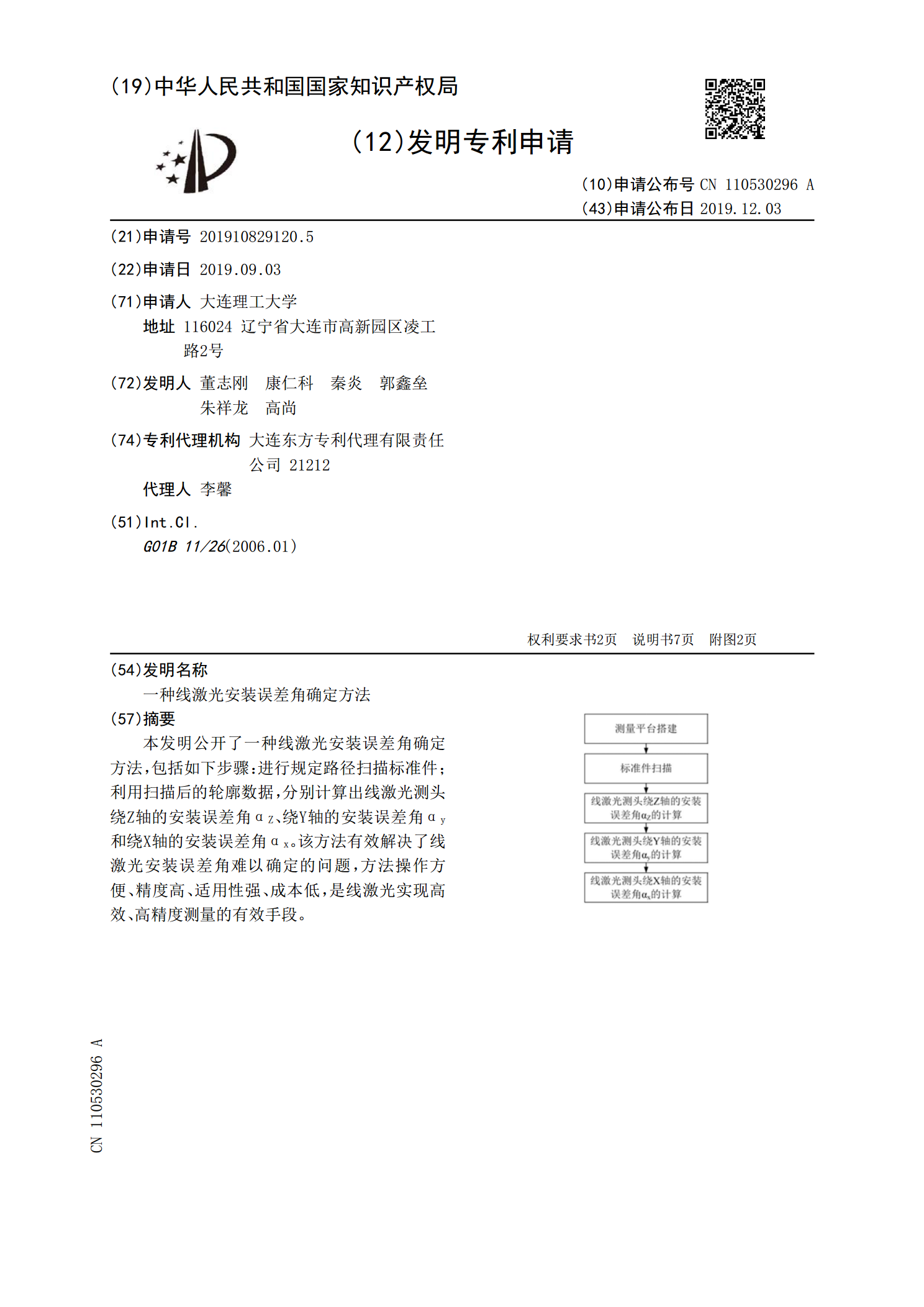
本发明公开了一种线激光安装误差角确定方法,包括如下步骤:进行规定路径扫描标准件;利用扫描后的轮廓数据,分别计算出线激光测头绕Z轴的安装误差角α
一种卡线器安装位置的确定方法.pdf
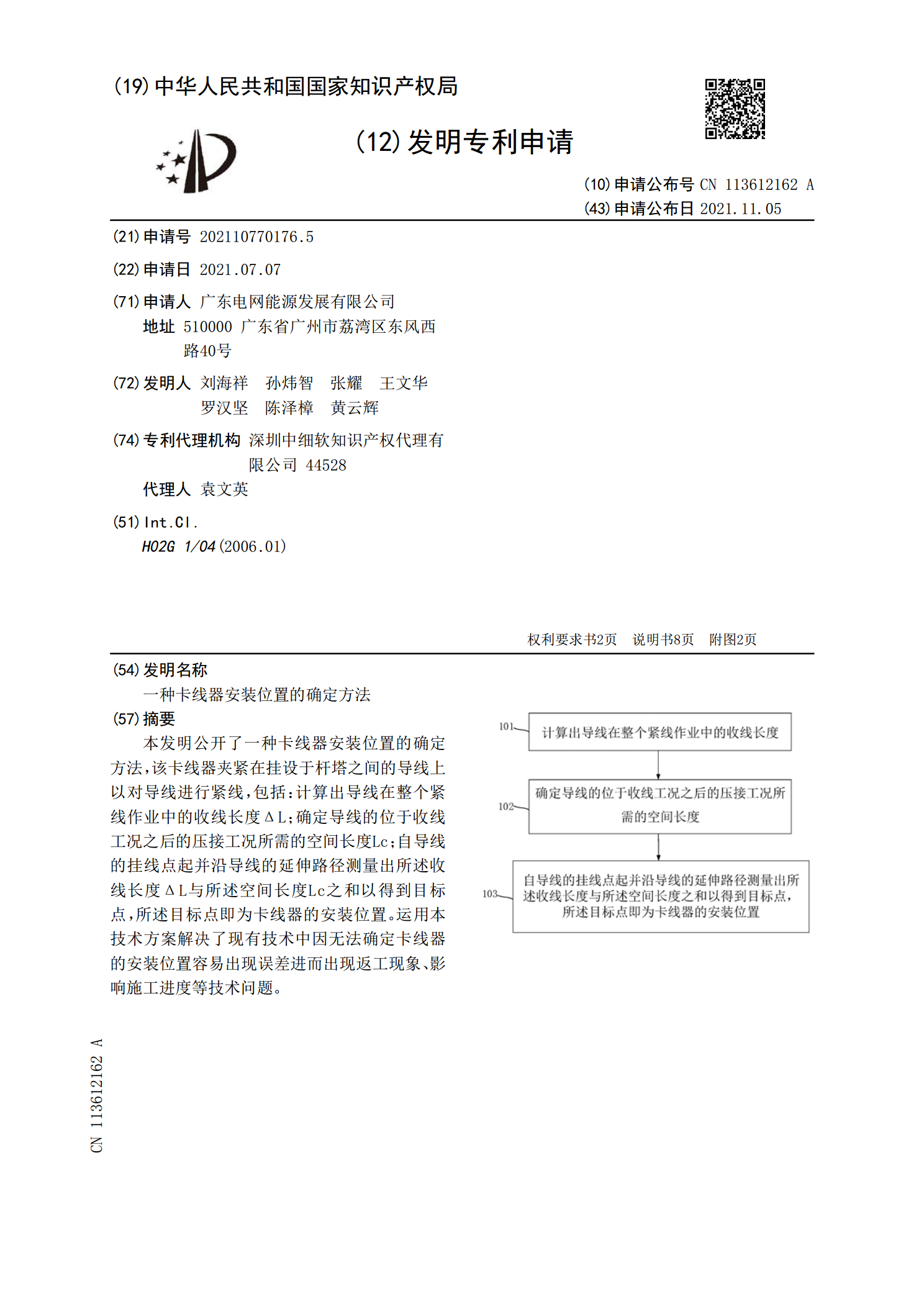
本发明公开了一种卡线器安装位置的确定方法,该卡线器夹紧在挂设于杆塔之间的导线上以对导线进行紧线,包括:计算出导线在整个紧线作业中的收线长度ΔL;确定导线的位于收线工况之后的压接工况所需的空间长度Lc;自导线的挂线点起并沿导线的延伸路径测量出所述收线长度ΔL与所述空间长度Lc之和以得到目标点,所述目标点即为卡线器的安装位置。运用本技术方案解决了现有技术中因无法确定卡线器的安装位置容易出现误差进而出现返工现象、影响施工进度等技术问题。

激光发散角测量的误差分析.docx
激光发散角测量的误差分析激光发散角是激光束呈锥形向外发散的角度,是衡量激光束如何向外扩散的一个重要参数。激光发散角的准确测量对于很多领域的实验和应用都是至关重要的,例如激光技术、激光器性能评估、光通信等。在激光发散角测量中,由于仪器精度、环境因素以及测量方法等多种因素的影响,测量结果会存在一定的误差。本文将对激光发散角测量误差进行分析。首先,仪器精度是影响激光发散角测量误差的一个重要因素。在测量过程中,使用的仪器应具有足够的精度和分辨率。例如,常用的测量激光发散角的仪器有角度测量仪、衍射光栅、平行光管等。

一种激光焊接位置误差补偿方法及激光焊接设备.pdf
本发明公开了一种激光焊接位置误差补偿方法及激光焊接设备,属于激光焊接设备技术领域。一种激光焊接位置误差补偿方法及激光焊接设备,包括安装桌和侧板,所述安装桌的内部安装有弹簧,且弹簧的底部设置有支撑脚,所述安装桌的顶部安装有第一螺纹杆,且第一螺纹杆的边侧设置有第一传动螺母,并且第一传动螺母的顶部安装有安装板,所述侧板设置于安装板的底部,且侧板的底部安装有第一滚轮,并且第一滚轮的外侧设置有底板,所述底板的底部安装有第二传动螺母,且第二传动螺母的内部贯穿有第二螺纹杆;该激光焊接位置误差补偿方法及激光焊接设备,具有

从地图数据、激光和相机确定偏航误差.pdf
本公开涉及基于地图数据和从光检测和测距(LIDAR)设备和/或相机设备接收的传感器数据的各种组合来促进确定车辆姿态的方法和系统。示例方法包括从(LIDAR)设备接收点云数据,并且变换点云数据以提供自上向下的图像。该方法还包括将自上向下的图像与参考图像进行比较,并且基于比较来确定偏航误差。替代方法包括从相机接收相机图像数据,并且变换相机图像数据以提供自上向下的图像。该方法还包括将自上向下的图像与参考图像进行比较,并且基于比较来确定偏航误差。