
一种晶圆承载组件及晶圆交互方法.pdf

雨巷****凝海

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种晶圆承载组件及晶圆交互方法.pdf
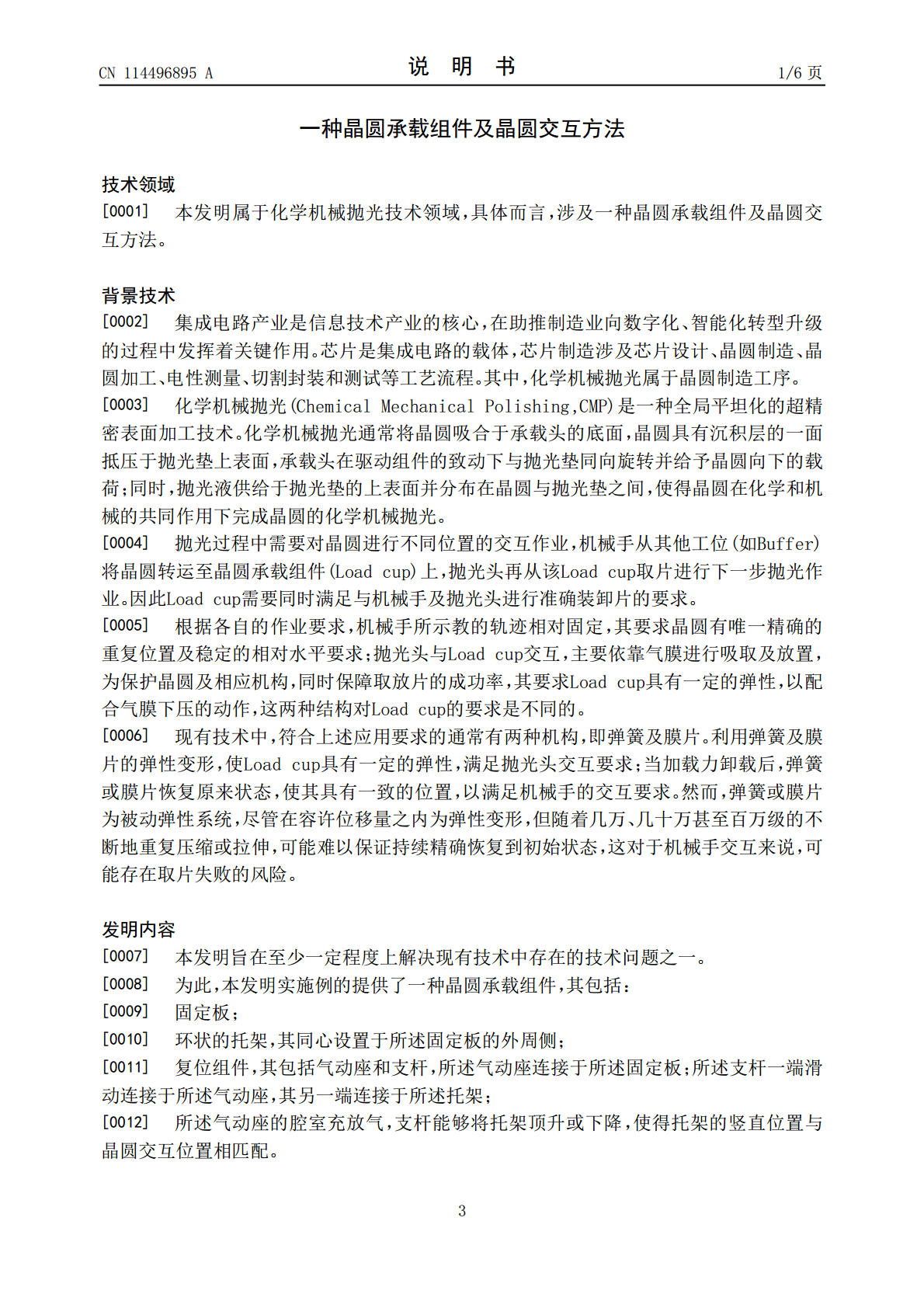
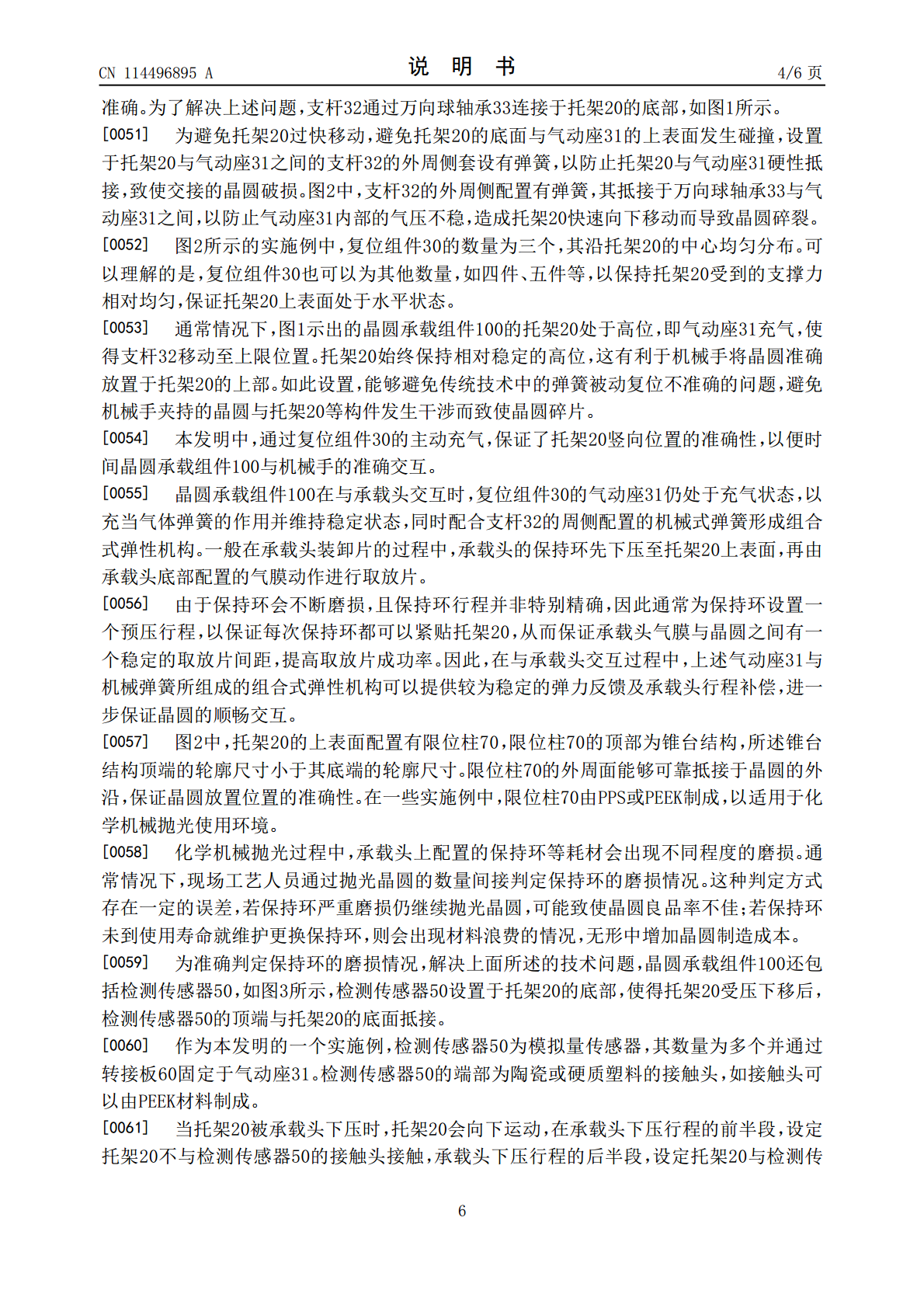
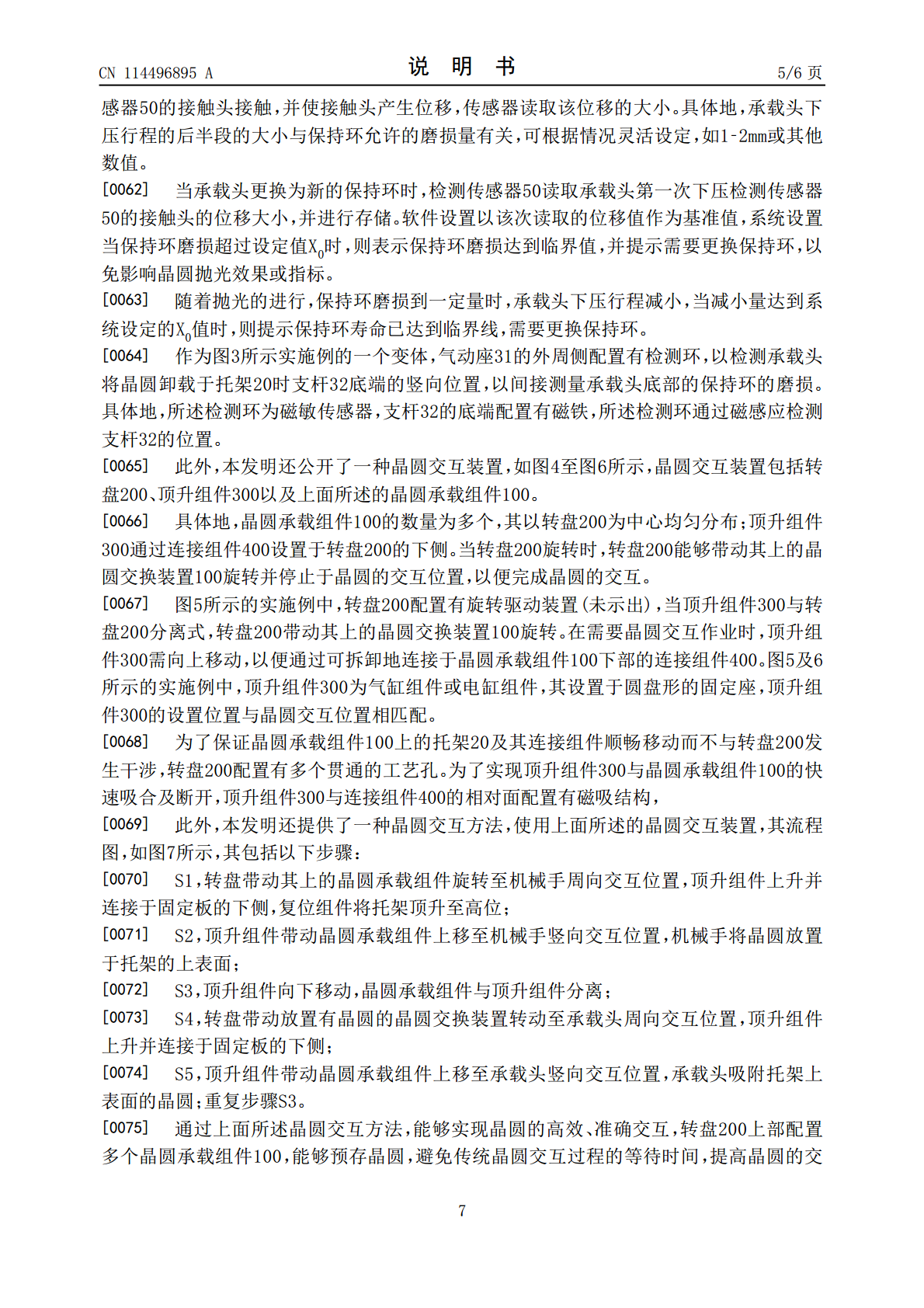
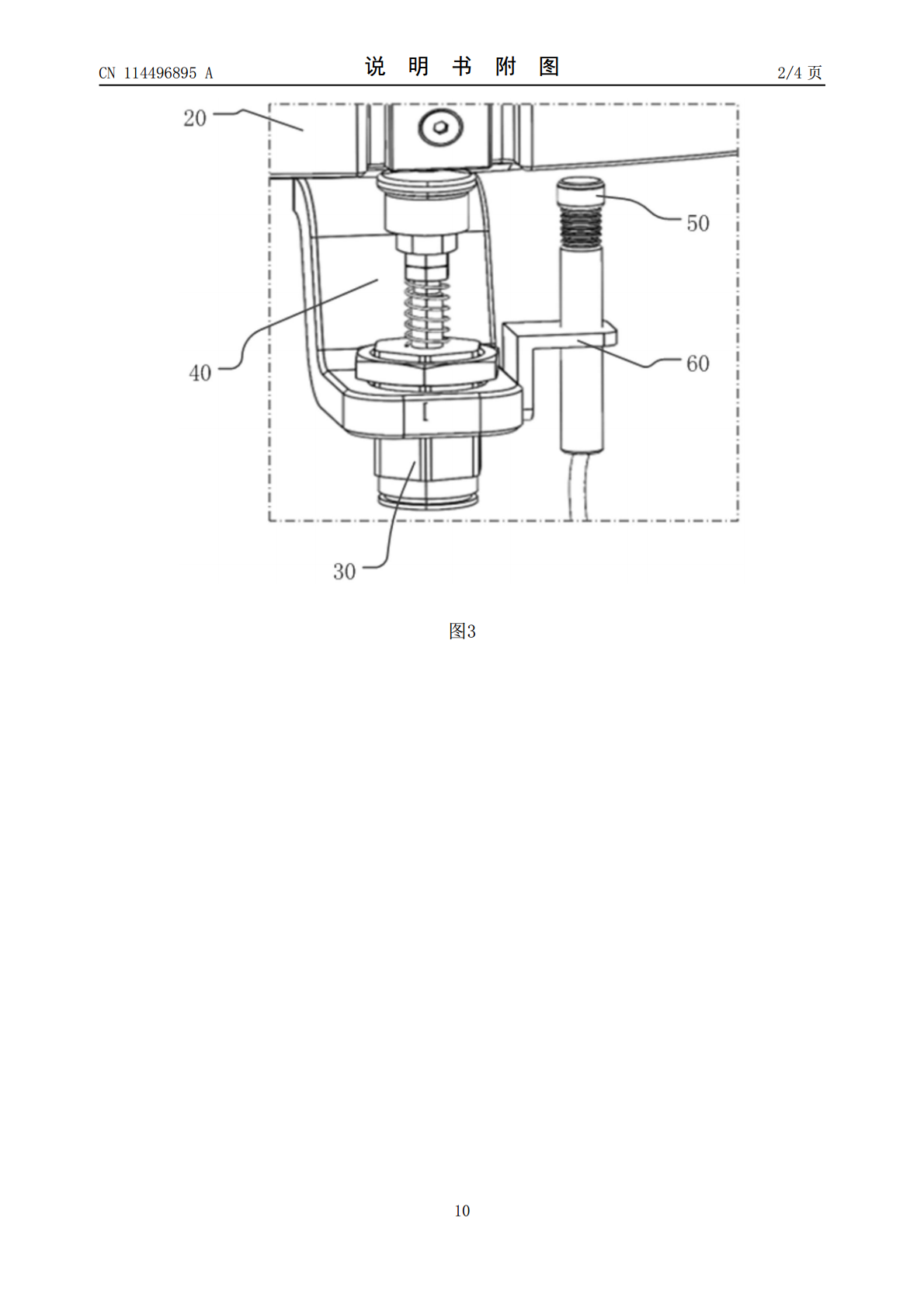
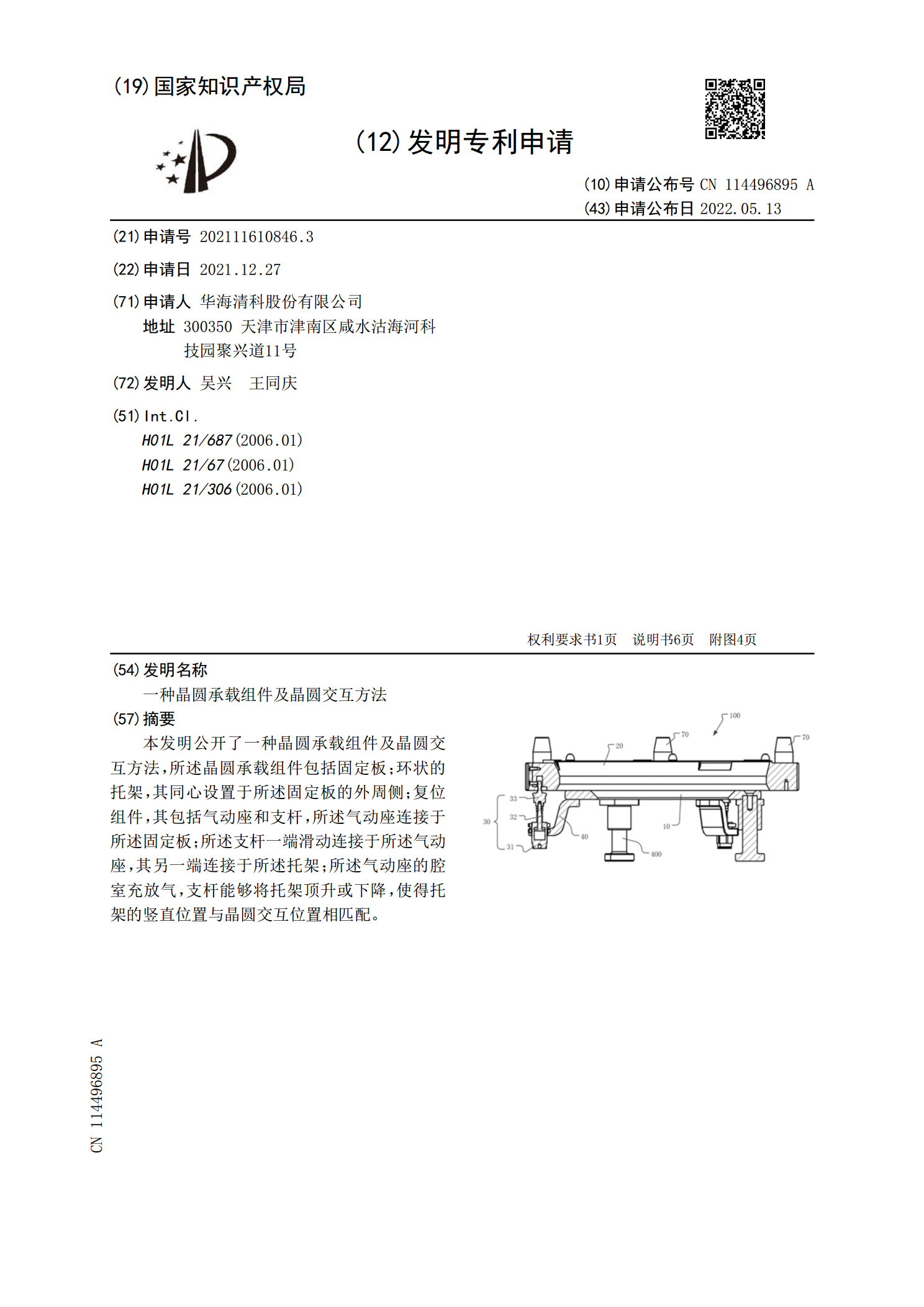
本发明公开了一种晶圆承载组件及晶圆交互方法,所述晶圆承载组件包括固定板;环状的托架,其同心设置于所述固定板的外周侧;复位组件,其包括气动座和支杆,所述气动座连接于所述固定板;所述支杆一端滑动连接于所述气动座,其另一端连接于所述托架;所述气动座的腔室充放气,支杆能够将托架顶升或下降,使得托架的竖直位置与晶圆交互位置相匹配。
晶圆组件及晶圆对准方法.pdf
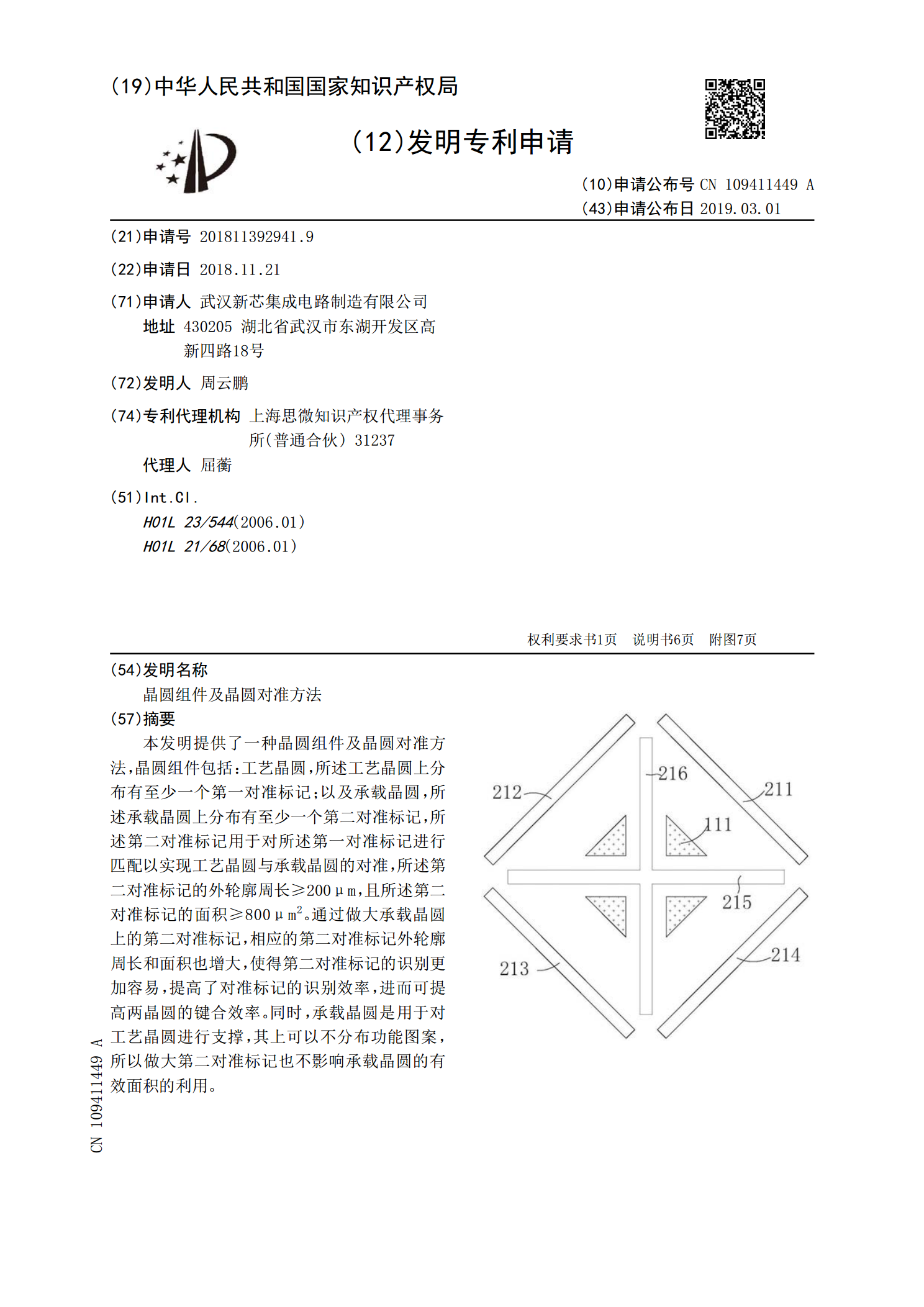
本发明提供了一种晶圆组件及晶圆对准方法,晶圆组件包括:工艺晶圆,所述工艺晶圆上分布有至少一个第一对准标记;以及承载晶圆,所述承载晶圆上分布有至少一个第二对准标记,所述第二对准标记用于对所述第一对准标记进行匹配以实现工艺晶圆与承载晶圆的对准,所述第二对准标记的外轮廓周长≥200μm,且所述第二对准标记的面积≥800μm

一种晶圆的封装方法及晶圆封装组件.pdf
本发明公开一种晶圆的封装方法及晶圆封装组件,所述晶圆的封装方法包括以下步骤:在晶圆的正面进行硅通孔工艺,以形成硅通孔,在硅通孔内填充第一金属填充物;在晶圆的正面进行黄光和镀膜工艺,在晶圆的正面形成第一重布线层和第一金属接触点;将晶圆的正面键合在载板上;对晶圆的背面进行减薄工艺;在晶圆的背面进行黄光和镀膜工艺;在载板的背面制作TGV连通孔;在载板表面涂布光阻,采用电极电镀在TGV连通孔内填充第二金属填充物;去除光阻,在晶圆的背面和载板的背面重新涂布光阻层,预留出铜柱凸块的位置;双面电镀;去除双面光阻。本发明
一种晶圆承载框及晶圆分片装置.pdf
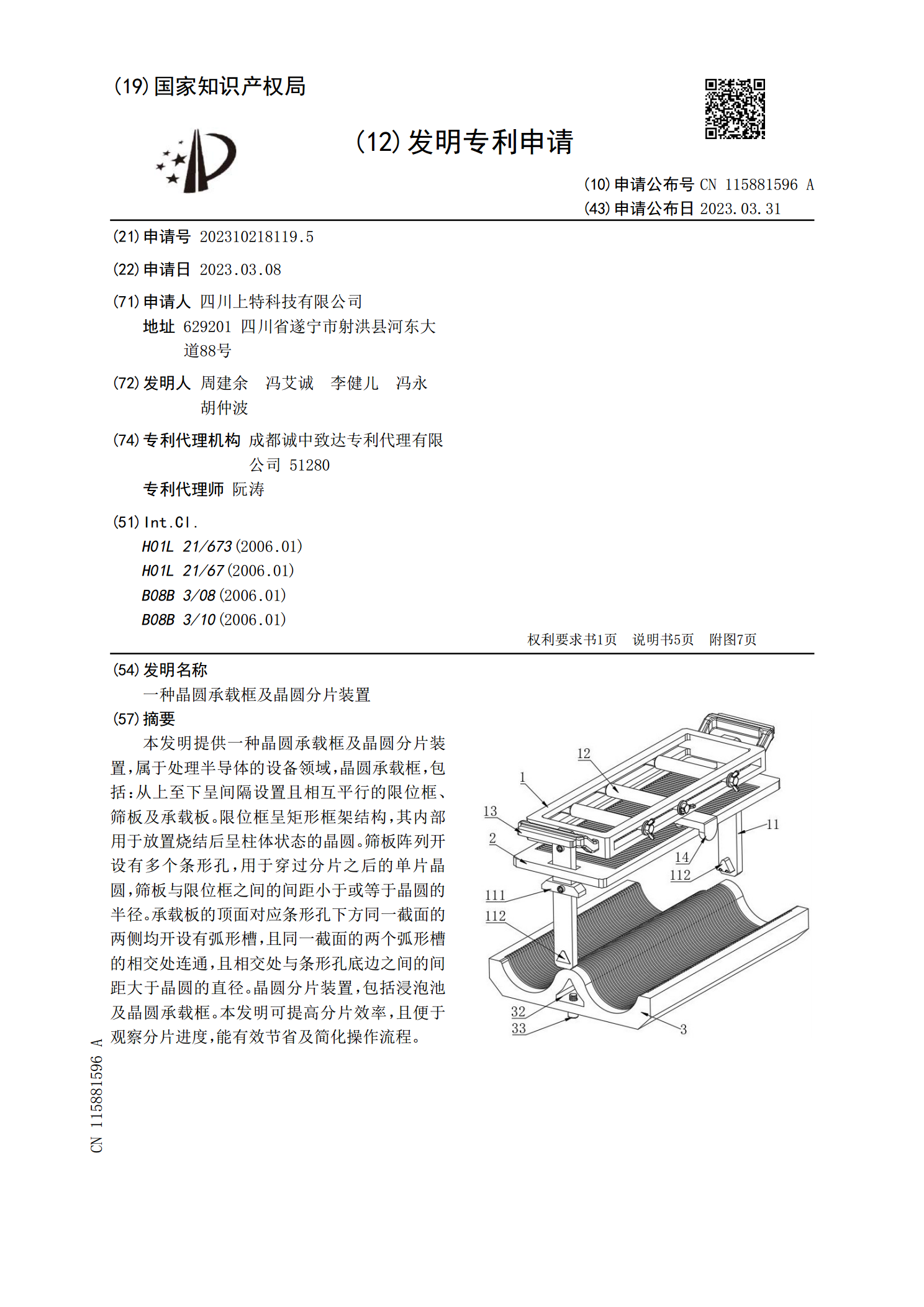
本发明提供一种晶圆承载框及晶圆分片装置,属于处理半导体的设备领域,晶圆承载框,包括:从上至下呈间隔设置且相互平行的限位框、筛板及承载板。限位框呈矩形框架结构,其内部用于放置烧结后呈柱体状态的晶圆。筛板阵列开设有多个条形孔,用于穿过分片之后的单片晶圆,筛板与限位框之间的间距小于或等于晶圆的半径。承载板的顶面对应条形孔下方同一截面的两侧均开设有弧形槽,且同一截面的两个弧形槽的相交处连通,且相交处与条形孔底边之间的间距大于晶圆的直径。晶圆分片装置,包括浸泡池及晶圆承载框。本发明可提高分片效率,且便于观察分片进度
晶圆承载盘维修方法.pdf
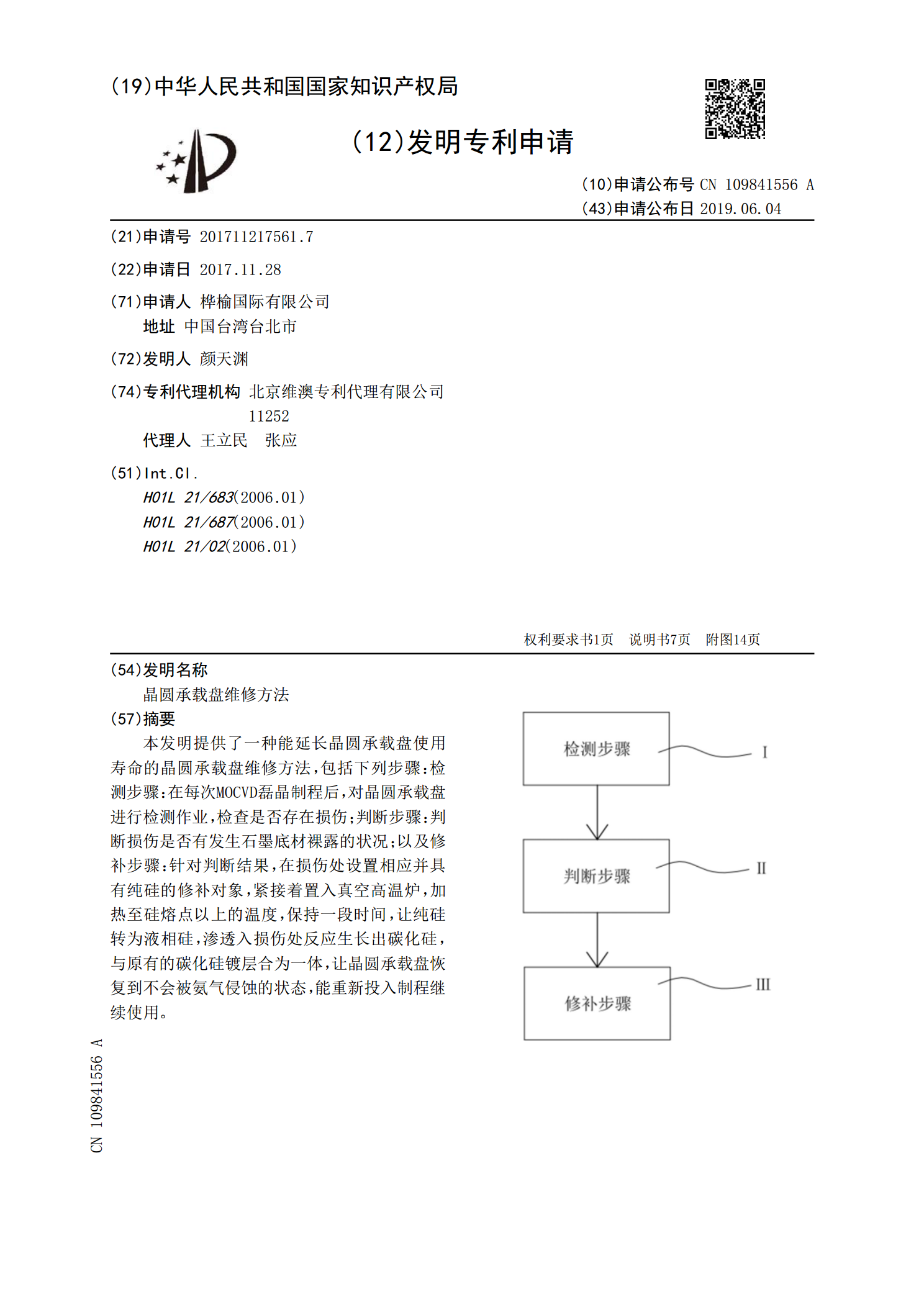
本发明提供了一种能延长晶圆承载盘使用寿命的晶圆承载盘维修方法,包括下列步骤:检测步骤:在每次MOCVD磊晶制程后,对晶圆承载盘进行检测作业,检查是否存在损伤;判断步骤:判断损伤是否有发生石墨底材裸露的状况;以及修补步骤:针对判断结果,在损伤处设置相应并具有纯硅的修补对象,紧接着置入真空高温炉,加热至硅熔点以上的温度,保持一段时间,让纯硅转为液相硅,渗透入损伤处反应生长出碳化硅,与原有的碳化硅镀层合为一体,让晶圆承载盘恢复到不会被氨气侵蚀的状态,能重新投入制程继续使用。