
基于尺蠖的仿生软体机器人.pdf

佳晨****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于尺蠖的仿生软体机器人.pdf
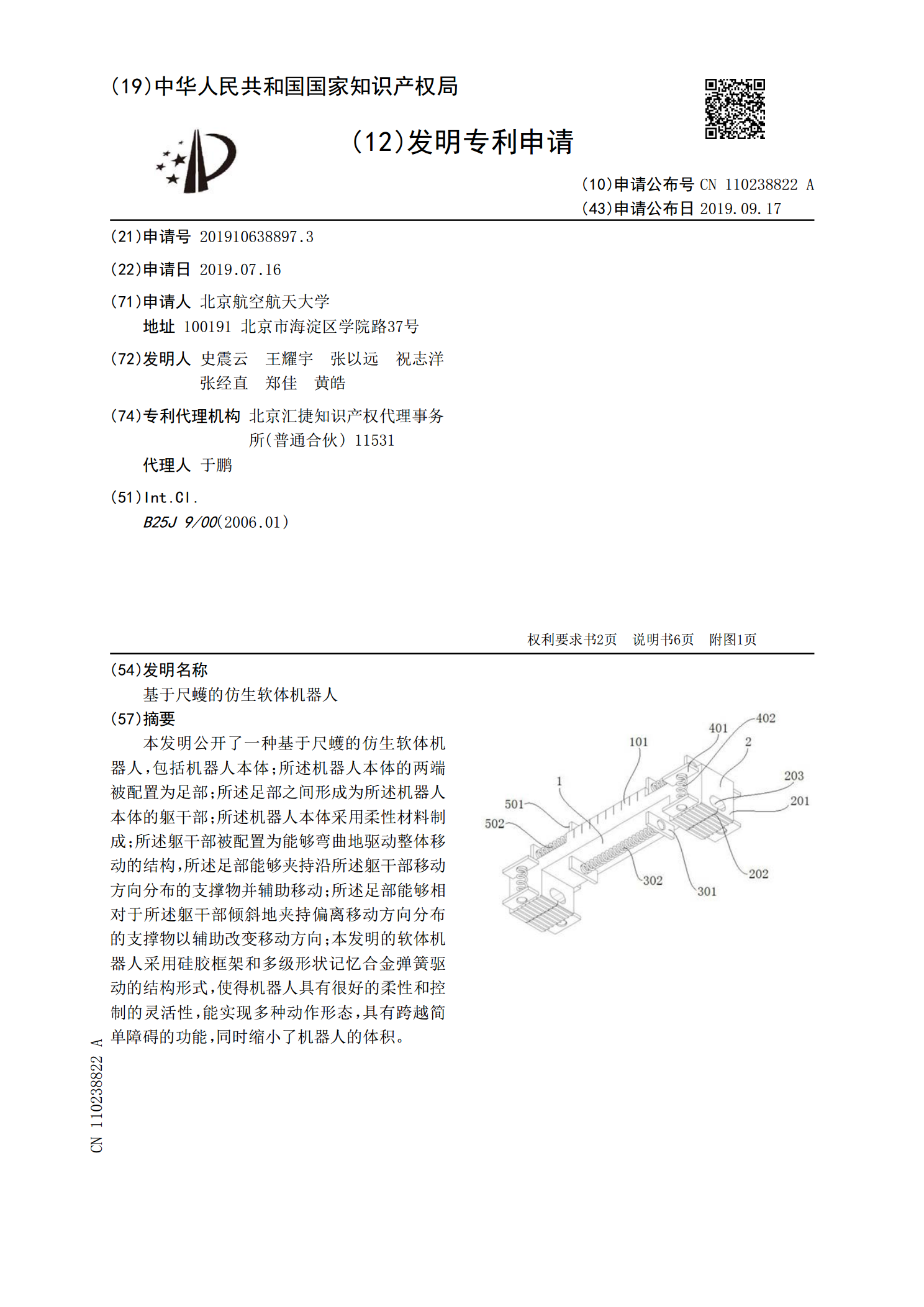
本发明公开了一种基于尺蠖的仿生软体机器人,包括机器人本体;所述机器人本体的两端被配置为足部;所述足部之间形成为所述机器人本体的躯干部;所述机器人本体采用柔性材料制成;所述躯干部被配置为能够弯曲地驱动整体移动的结构,所述足部能够夹持沿所述躯干部移动方向分布的支撑物并辅助移动;所述足部能够相对于所述躯干部倾斜地夹持偏离移动方向分布的支撑物以辅助改变移动方向;本发明的软体机器人采用硅胶框架和多级形状记忆合金弹簧驱动的结构形式,使得机器人具有很好的柔性和控制的灵活性,能实现多种动作形态,具有跨越简单障碍的功能,同

软体尺蠖爬行机器人建模与仿真分析.docx
软体尺蠖爬行机器人建模与仿真分析软体尺蠖爬行机器人建模与仿真分析摘要:软体尺蠖爬行机器人是一种模仿自然生物运动原理而设计的新型机器人。本文主要针对软体尺蠖爬行机器人进行建模与仿真分析。首先,通过对软体尺蠖的形态、运动特点和生理机制的研究,提出了软体尺蠖爬行机器人的基本结构和运动原理。然后,利用多体动力学原理建立了软体尺蠖爬行机器人的运动学模型,并通过数值仿真验证了模型的有效性。最后,通过对软体尺蠖爬行机器人不同运动变量的敏感性分析,进一步优化了机器人的设计与控制策略。1.引言近年来,随着机器人技术的发展,

仿尺蠖球型模块软体机器人的研究pptx.pptx
仿尺蠖球型模块软体机器人的研究随着人类科技的不断发展,人们越来越多地开始对未知领域的探索。软体机器人可以根据环境的改变而主动改变自身形态体积,与环境相融,具有普通刚性机器人不具有的优点,从而对软体机器人的研究成为了目前机器人研究领域的热点方向之一。目前软体机器人的研究尚处于初级阶段,大多数的软体机器人只能实现单一的简单的运动模式。基于以上原因,本文以尺蠖为主要仿生研究对象,设计和研制了一种具有多运动模式的球型模块软体机器人实验平台,并对该软体机器人智能控制方案进行了探索。本文针对软体机器人最为棘手的两个技

软体仿生机器人研究现状.pptx
软体仿生机器人研究现状目录软体仿生机器人的发展历程起源和背景早期研究和探索当前研究重点和方向软体仿生机器人的材料和技术材料选择制造技术驱动方式感知和控制技术软体仿生机器人的应用领域医疗健康领域救援和探测领域娱乐产业领域其他领域软体仿生机器人的挑战和前景技术挑战伦理和社会问题市场前景和商业机会未来发展方向和趋势感谢观看

仿生轮足式气动软体行走机器人.pdf
一种仿生轮足式气动软体行走机器人,其主要包括:软体基体、行走机构、驱动机构以及末端执行器。软体基体为采用柔性硅橡胶在模具中分步浇筑而成的一个整体结构,软体基体每个腔的一端各与一根气管相连,该气管的另一端与一个气泵相连,气管与气泵组成驱动机构。在软体基体的两端及每两段气腔之间均设一个与其同轴中空的圆柱形连接件,通过该连接件将软体基体安装在行走机构上。所述的行走机构主要包括:轮胎安装架、轮胎、单向轴承以及锁紧螺母。所述的末端执行器通过末端安装架安装在软体基体非与气管相连一端的轮胎安装架上。本发明软体基体形状、