
仿尺蠖球型模块软体机器人的研究pptx.pptx

lj****88


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

仿尺蠖球型模块软体机器人的研究pptx.pptx
仿尺蠖球型模块软体机器人的研究随着人类科技的不断发展,人们越来越多地开始对未知领域的探索。软体机器人可以根据环境的改变而主动改变自身形态体积,与环境相融,具有普通刚性机器人不具有的优点,从而对软体机器人的研究成为了目前机器人研究领域的热点方向之一。目前软体机器人的研究尚处于初级阶段,大多数的软体机器人只能实现单一的简单的运动模式。基于以上原因,本文以尺蠖为主要仿生研究对象,设计和研制了一种具有多运动模式的球型模块软体机器人实验平台,并对该软体机器人智能控制方案进行了探索。本文针对软体机器人最为棘手的两个技
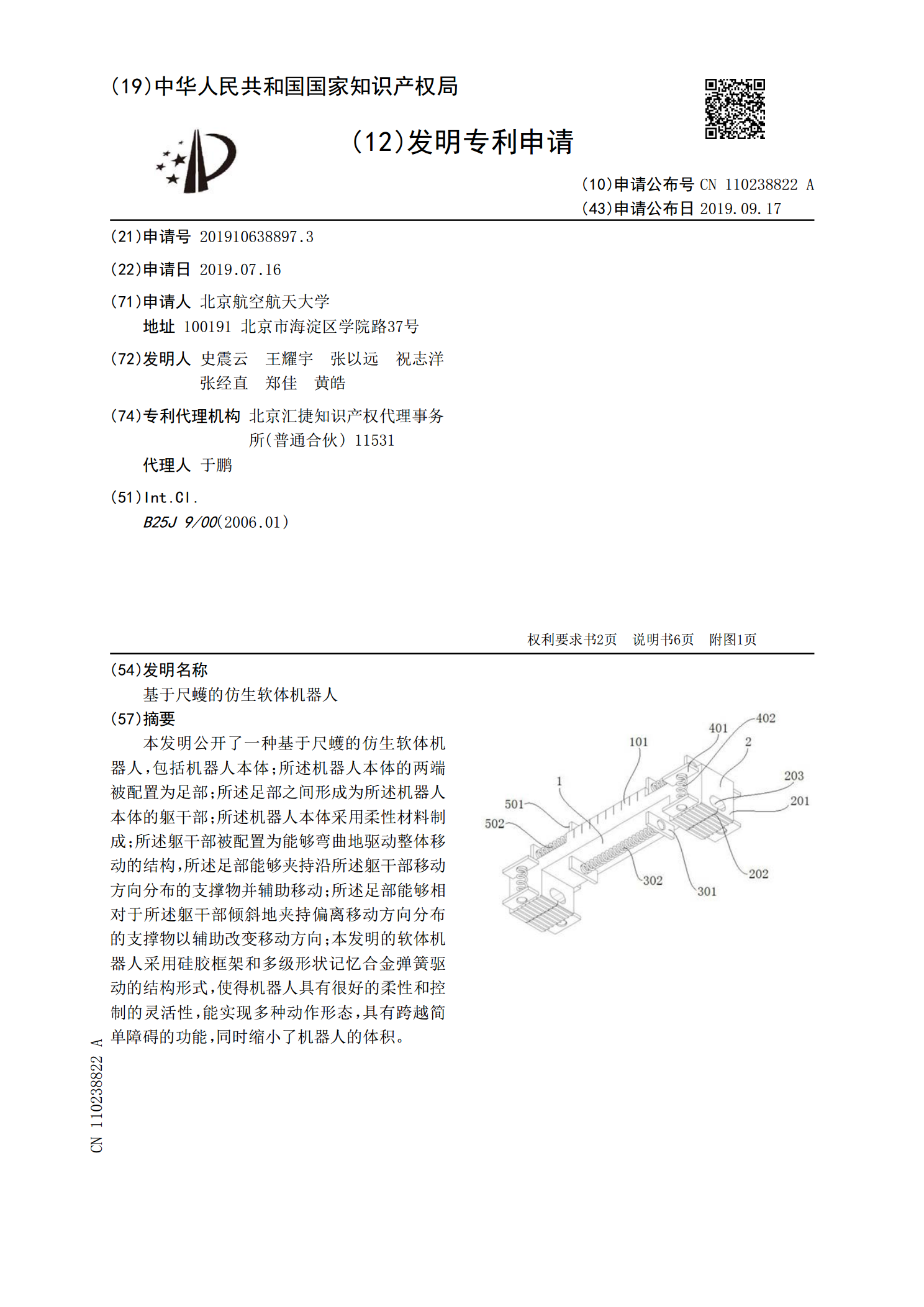
基于尺蠖的仿生软体机器人.pdf
本发明公开了一种基于尺蠖的仿生软体机器人,包括机器人本体;所述机器人本体的两端被配置为足部;所述足部之间形成为所述机器人本体的躯干部;所述机器人本体采用柔性材料制成;所述躯干部被配置为能够弯曲地驱动整体移动的结构,所述足部能够夹持沿所述躯干部移动方向分布的支撑物并辅助移动;所述足部能够相对于所述躯干部倾斜地夹持偏离移动方向分布的支撑物以辅助改变移动方向;本发明的软体机器人采用硅胶框架和多级形状记忆合金弹簧驱动的结构形式,使得机器人具有很好的柔性和控制的灵活性,能实现多种动作形态,具有跨越简单障碍的功能,同
仿人机器人的设计与研究pptx.pptx
仿人机器人的设计与研究仿人机器人是一种依据人类外形结构设计的机器,是集计算机技术、微电子技术、机械设计技术、传感及控制技术于一身的机电一体化产品,它主要由主体结构、动力部分、传感部分、驱动部分、执行部分、控制及信息部分组成。本课题完成了一个仿人机器人各个组成部分的设计,并对其进行了步态规划和力学分析的研究。具体研究工作主要包括以下几个方面:首先,通过研究人体的相关结构尺寸和各关节运动特征,选取仿人机器人的机构形式,确定机器人的自由度配置、机械结构和尺寸;对所设计的仿人机器人进行了运动学建模和分析,采用广义

软体尺蠖爬行机器人建模与仿真分析.docx
软体尺蠖爬行机器人建模与仿真分析软体尺蠖爬行机器人建模与仿真分析摘要:软体尺蠖爬行机器人是一种模仿自然生物运动原理而设计的新型机器人。本文主要针对软体尺蠖爬行机器人进行建模与仿真分析。首先,通过对软体尺蠖的形态、运动特点和生理机制的研究,提出了软体尺蠖爬行机器人的基本结构和运动原理。然后,利用多体动力学原理建立了软体尺蠖爬行机器人的运动学模型,并通过数值仿真验证了模型的有效性。最后,通过对软体尺蠖爬行机器人不同运动变量的敏感性分析,进一步优化了机器人的设计与控制策略。1.引言近年来,随着机器人技术的发展,

仿尺蠖步态的爬杆机器人的动态仿真研究.docx
仿尺蠖步态的爬杆机器人的动态仿真研究概述本文旨在探讨仿尺蠖步态的爬杆机器人的动态仿真研究。尺蠖是一种非常灵活的昆虫,它们可以在不同类型的杆状物上爬行,甚至能够在平滑的表面上行走。仿尺蠖步态的机器人可以在特殊环境下执行各种任务,例如检查、清理或维护高层建筑的外墙。本文将介绍机器人的设计和仿真模型,分析各个关键部件的物理特性,并详细说明控制算法的实现过程。机器人设计尺蠖在摇摆过程中的步态是非常特殊的。机器人的设计初衷是仿尺蠖的行走方式,所以该机器人的外观非常类似于尺蠖。机器人由一个主体和数个杆状支架组成,每个