
仿生轮足式气动软体行走机器人.pdf

冷霜****魔王

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

仿生轮足式气动软体行走机器人.pdf
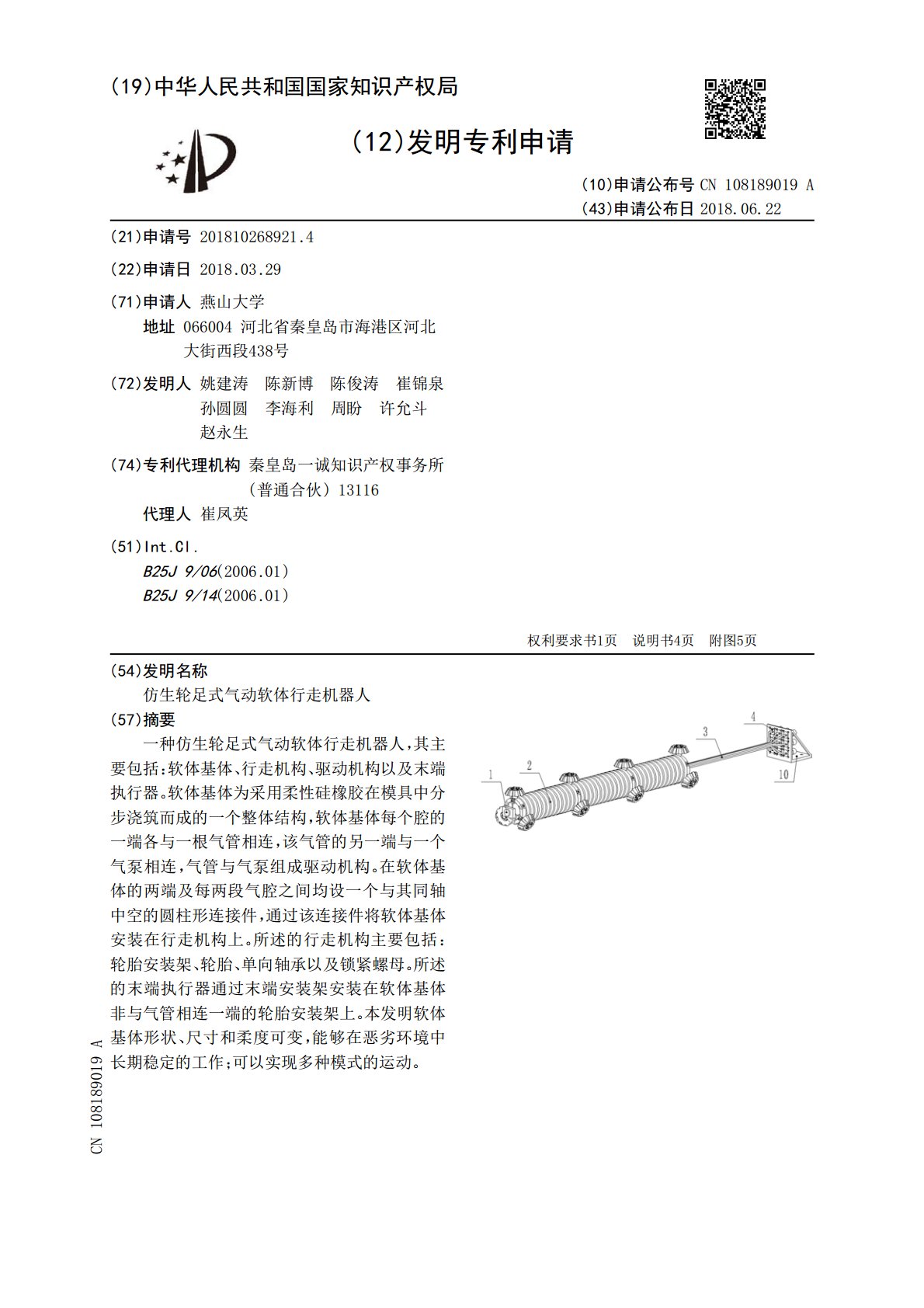
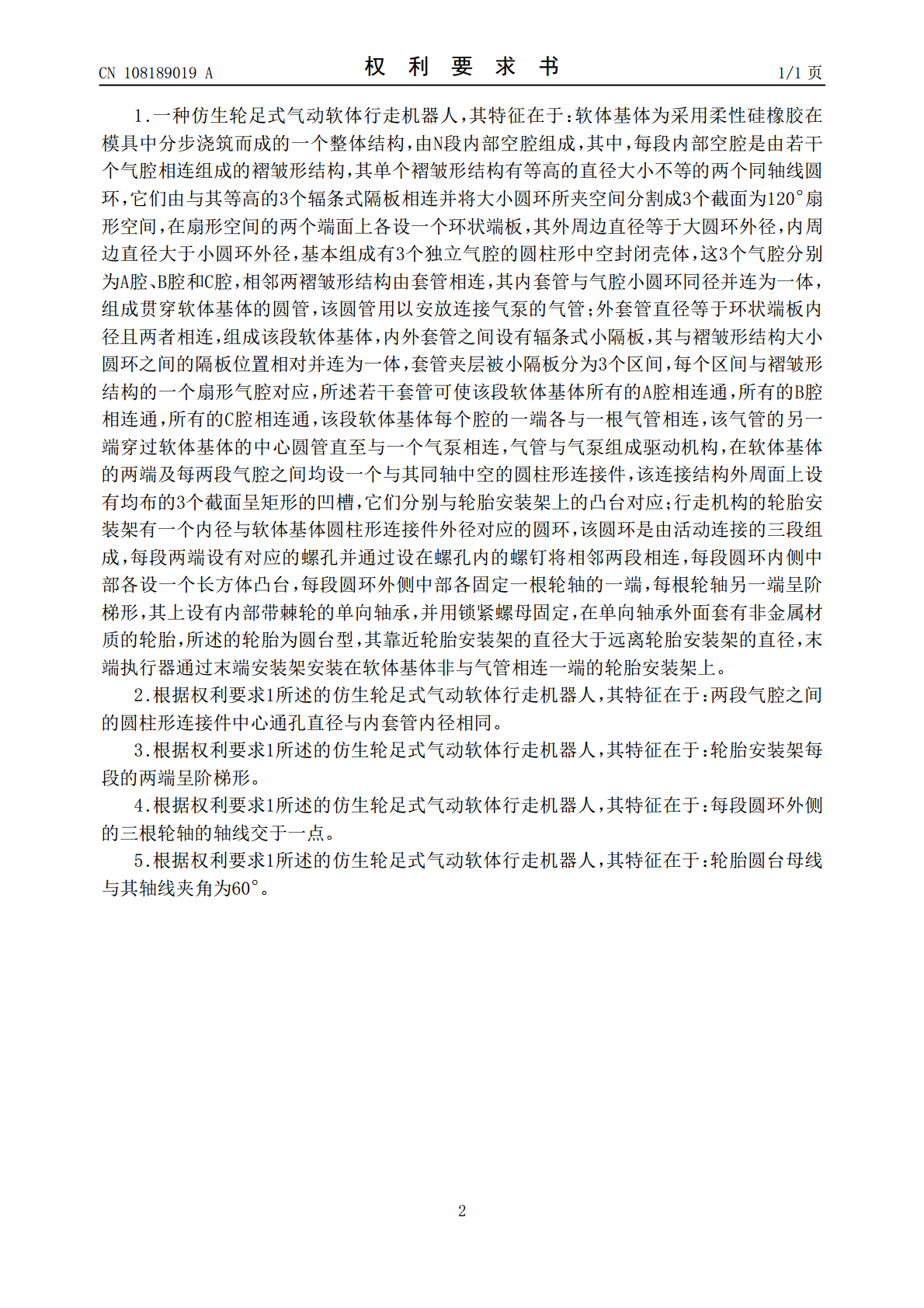
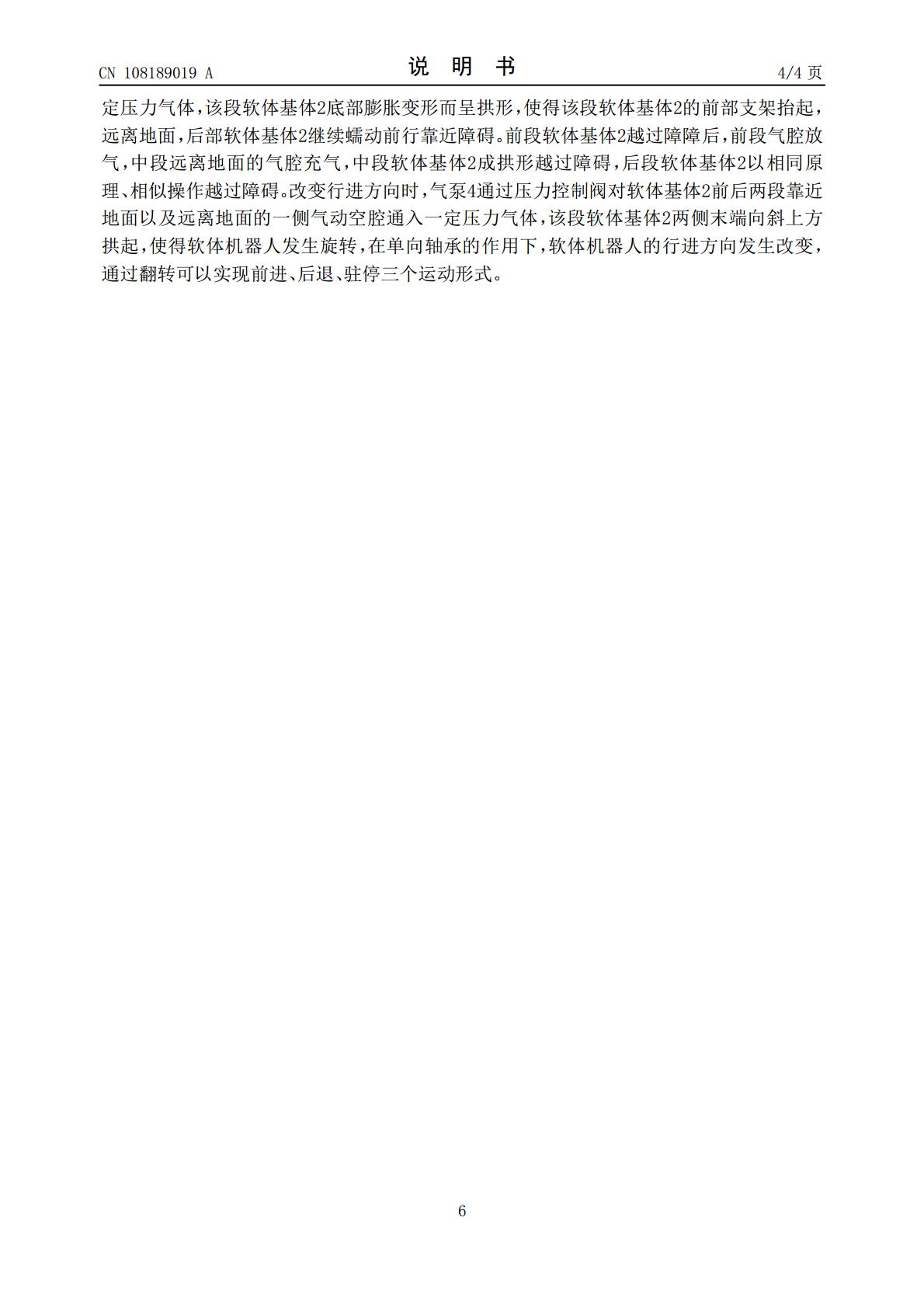
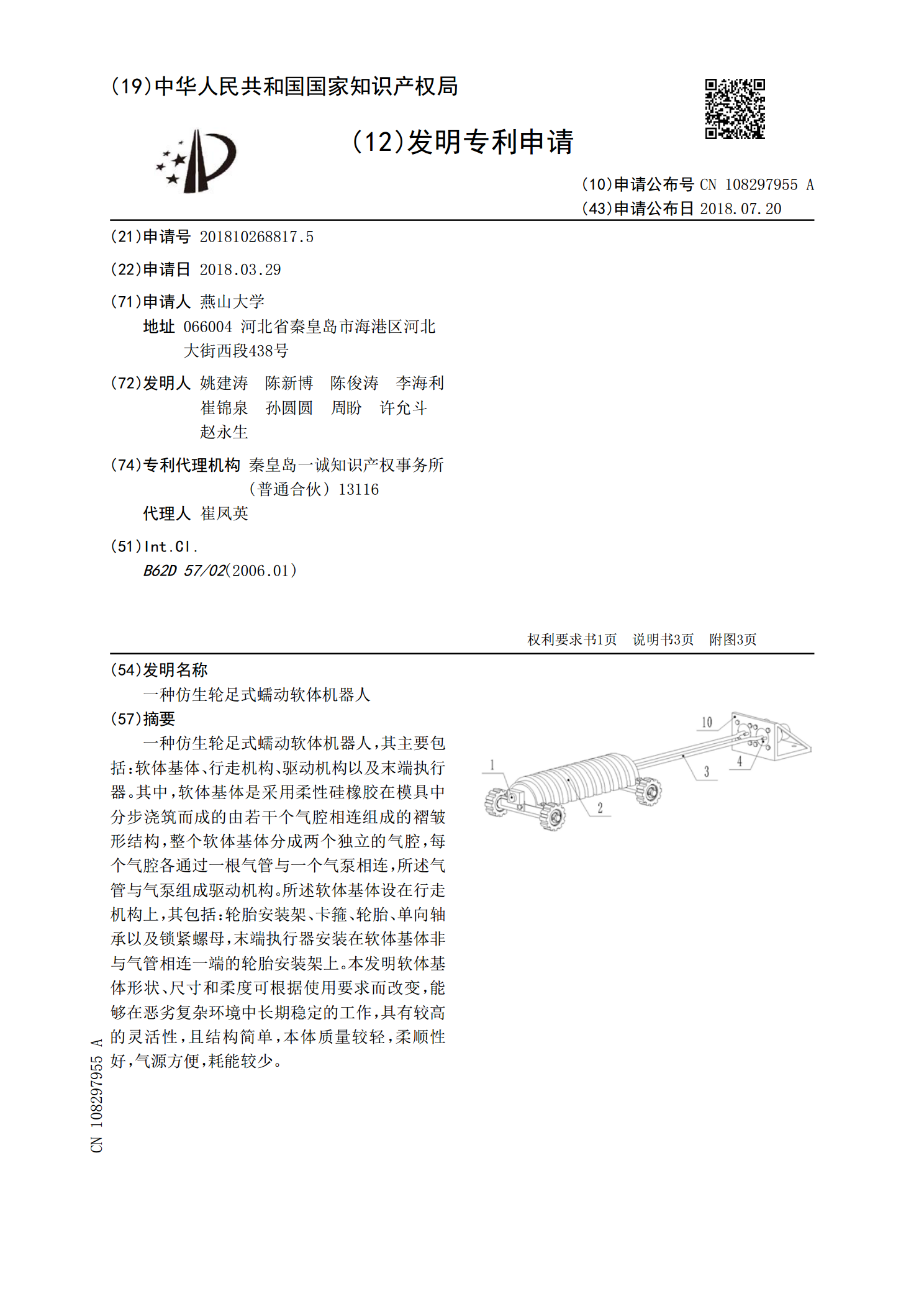
一种仿生轮足式气动软体行走机器人,其主要包括:软体基体、行走机构、驱动机构以及末端执行器。软体基体为采用柔性硅橡胶在模具中分步浇筑而成的一个整体结构,软体基体每个腔的一端各与一根气管相连,该气管的另一端与一个气泵相连,气管与气泵组成驱动机构。在软体基体的两端及每两段气腔之间均设一个与其同轴中空的圆柱形连接件,通过该连接件将软体基体安装在行走机构上。所述的行走机构主要包括:轮胎安装架、轮胎、单向轴承以及锁紧螺母。所述的末端执行器通过末端安装架安装在软体基体非与气管相连一端的轮胎安装架上。本发明软体基体形状、
轮足式仿生软体机器人设计与运动分析.pptx
,目录PartOnePartTwo设计理念与目标材料选择与特性结构设计制作工艺与流程PartThree运动学模型建立动力学模型建立运动性能评估优化设计PartFour在医疗领域的应用在救援领域的应用在环境监测领域的应用在其他领域的应用PartFive当前面临的主要挑战技术发展趋势与展望未来研究方向与重点THANKS
一种仿生轮足式蠕动软体机器人.pdf
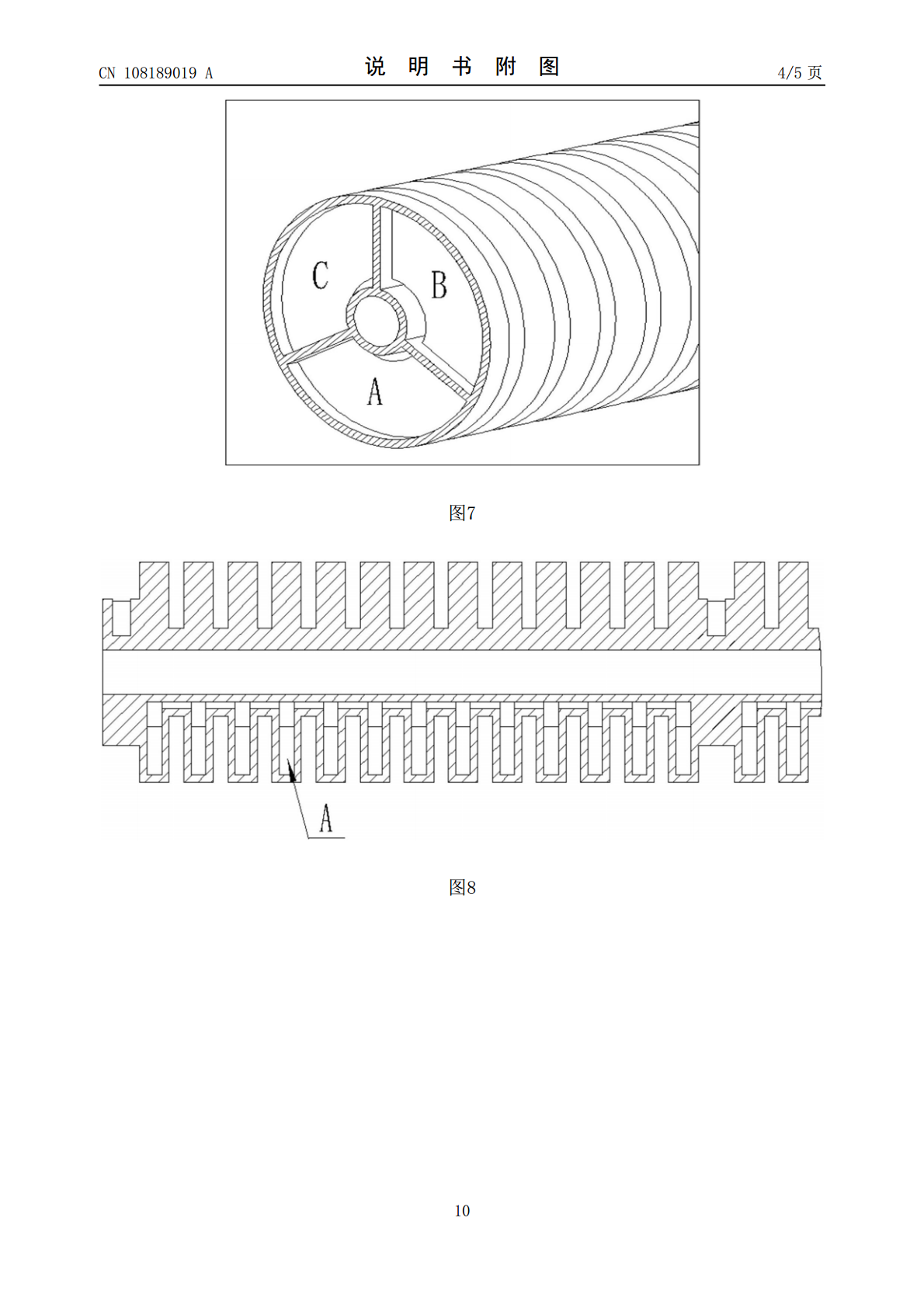
一种仿生轮足式蠕动软体机器人,其主要包括:软体基体、行走机构、驱动机构以及末端执行器。其中,软体基体是采用柔性硅橡胶在模具中分步浇筑而成的由若干个气腔相连组成的褶皱形结构,整个软体基体分成两个独立的气腔,每个气腔各通过一根气管与一个气泵相连,所述气管与气泵组成驱动机构。所述软体基体设在行走机构上,其包括:轮胎安装架、卡箍、轮胎、单向轴承以及锁紧螺母,末端执行器安装在软体基体非与气管相连一端的轮胎安装架上。本发明软体基体形状、尺寸和柔度可根据使用要求而改变,能够在恶劣复杂环境中长期稳定的工作,具有较高的灵活

对称式仿生六足行走装置.pdf
本发明涉及一种对称式仿生六足行走装置,属于一种机器人。其包括两个结构完全一致、中心对称的上层机构及下层机构,该上层机构通过中心的转向单元与下层机构连接,该转向单元包括锥齿轮Ⅰ、转向轴、锥齿轮Ⅱ及电机,该电机通过由锥齿轮Ⅰ及锥齿轮Ⅱ组成的锥齿轮副与转向轴连接。本发明以仿生学为基础,设计了一种全新的仿生六足行走机构,这种机构以六足纲昆虫的步态运动方式为模板,以一侧的前足后足和另一侧的中足作为一组,每一步都组成一个三角支撑机构,因为这种贴地行走方式重心低,反应灵敏,具有极强的结构稳定性。同时,我们在机器人机构的
一种四足仿生行走机器人.pdf
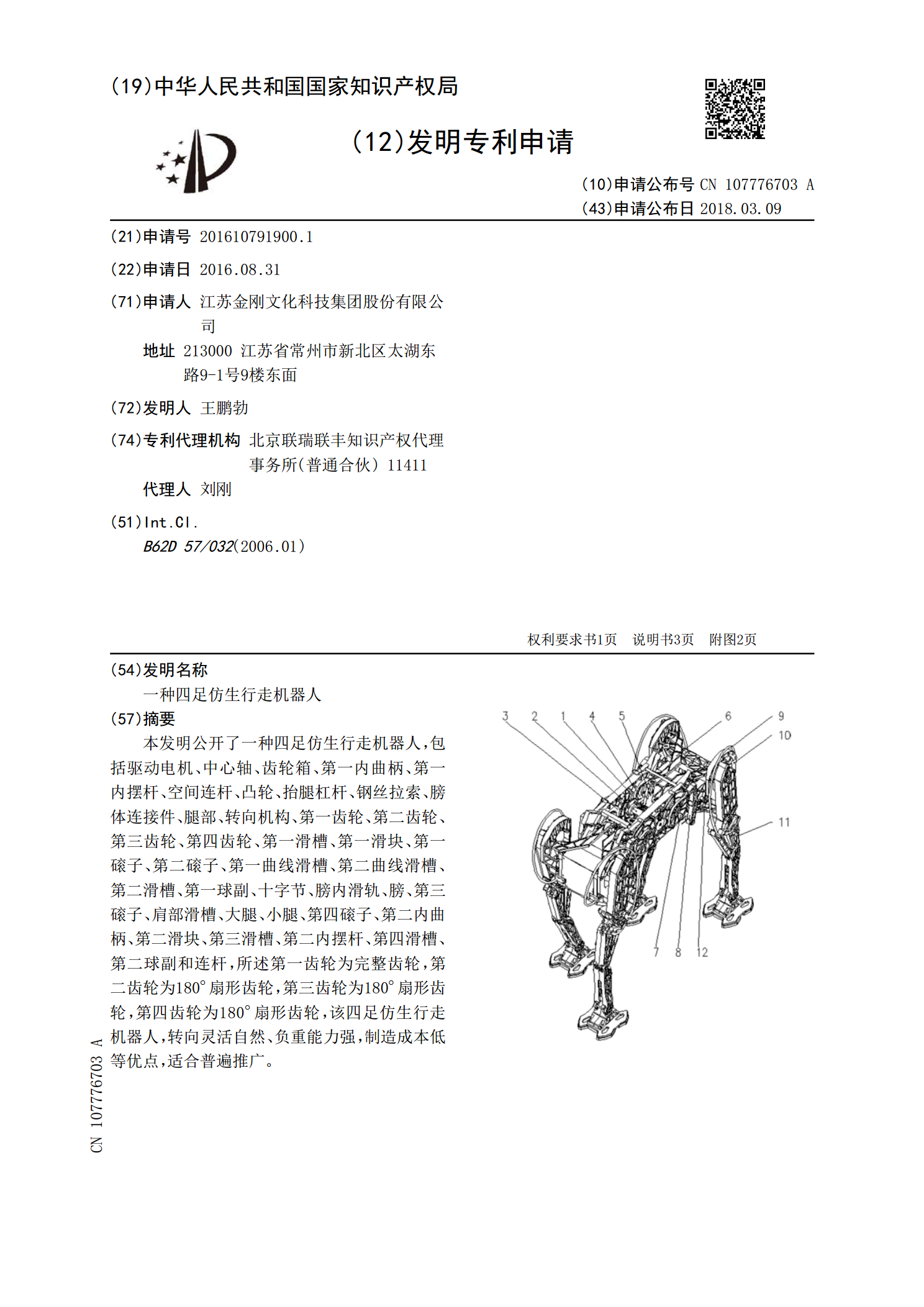
本发明公开了一种四足仿生行走机器人,包括驱动电机、中心轴、齿轮箱、第一内曲柄、第一内摆杆、空间连杆、凸轮、抬腿杠杆、钢丝拉索、膀体连接件、腿部、转向机构、第一齿轮、第二齿轮、第三齿轮、第四齿轮、第一滑槽、第一滑块、第一磙子、第二磙子、第一曲线滑槽、第二曲线滑槽、第二滑槽、第一球副、十字节、膀内滑轨、膀、第三磙子、肩部滑槽、大腿、小腿、第四磙子、第二内曲柄、第二滑块、第三滑槽、第二内摆杆、第四滑槽、第二球副和连杆,所述第一齿轮为完整齿轮,第二齿轮为180°扇形齿轮,第三齿轮为180°扇形齿轮,第四齿轮为18