
孔内回转体同轴度测量装置及方法.pdf

小长****6淑

1/10
2/10
3/10

4/10

5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

孔内回转体同轴度测量装置及方法.pdf
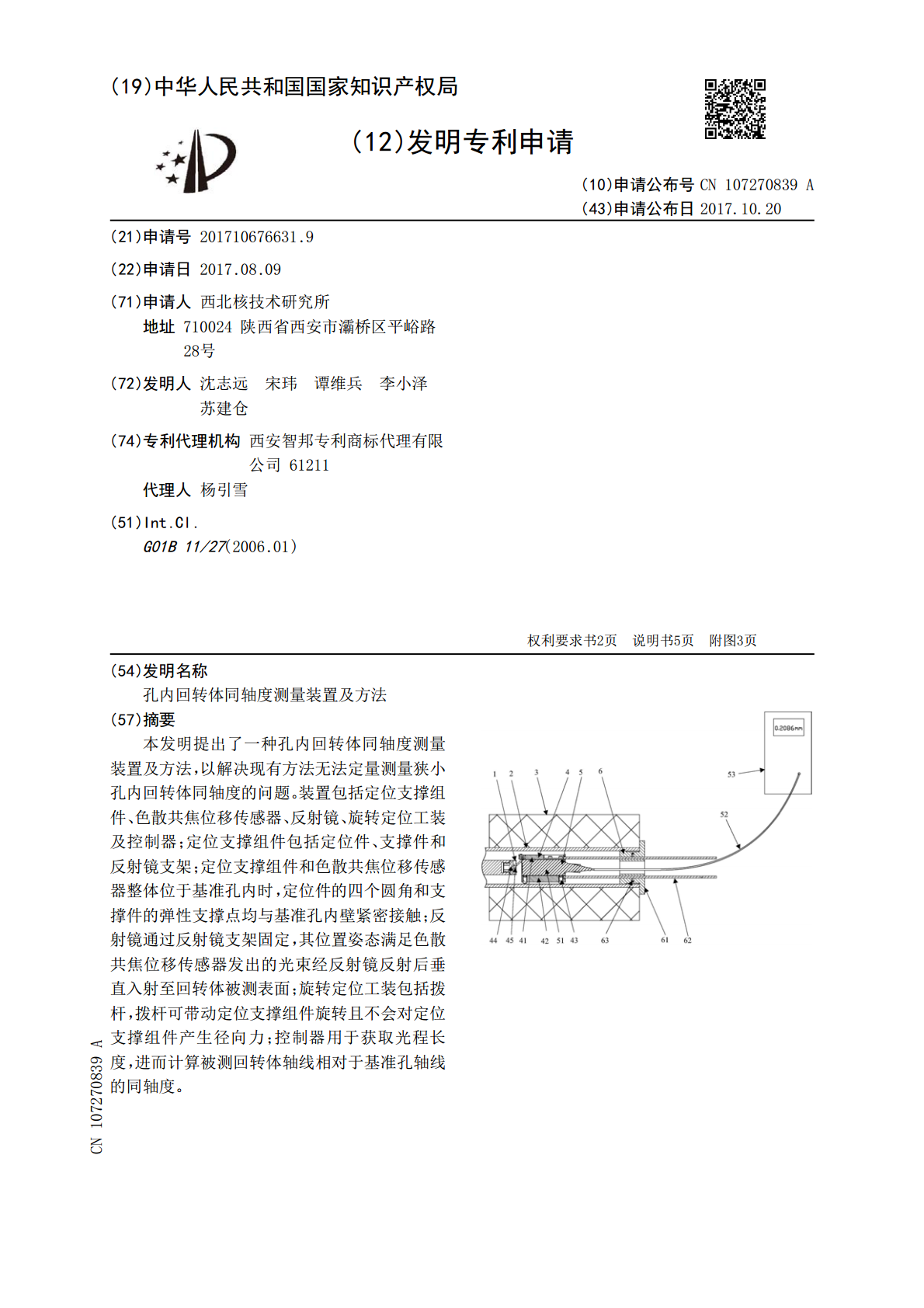
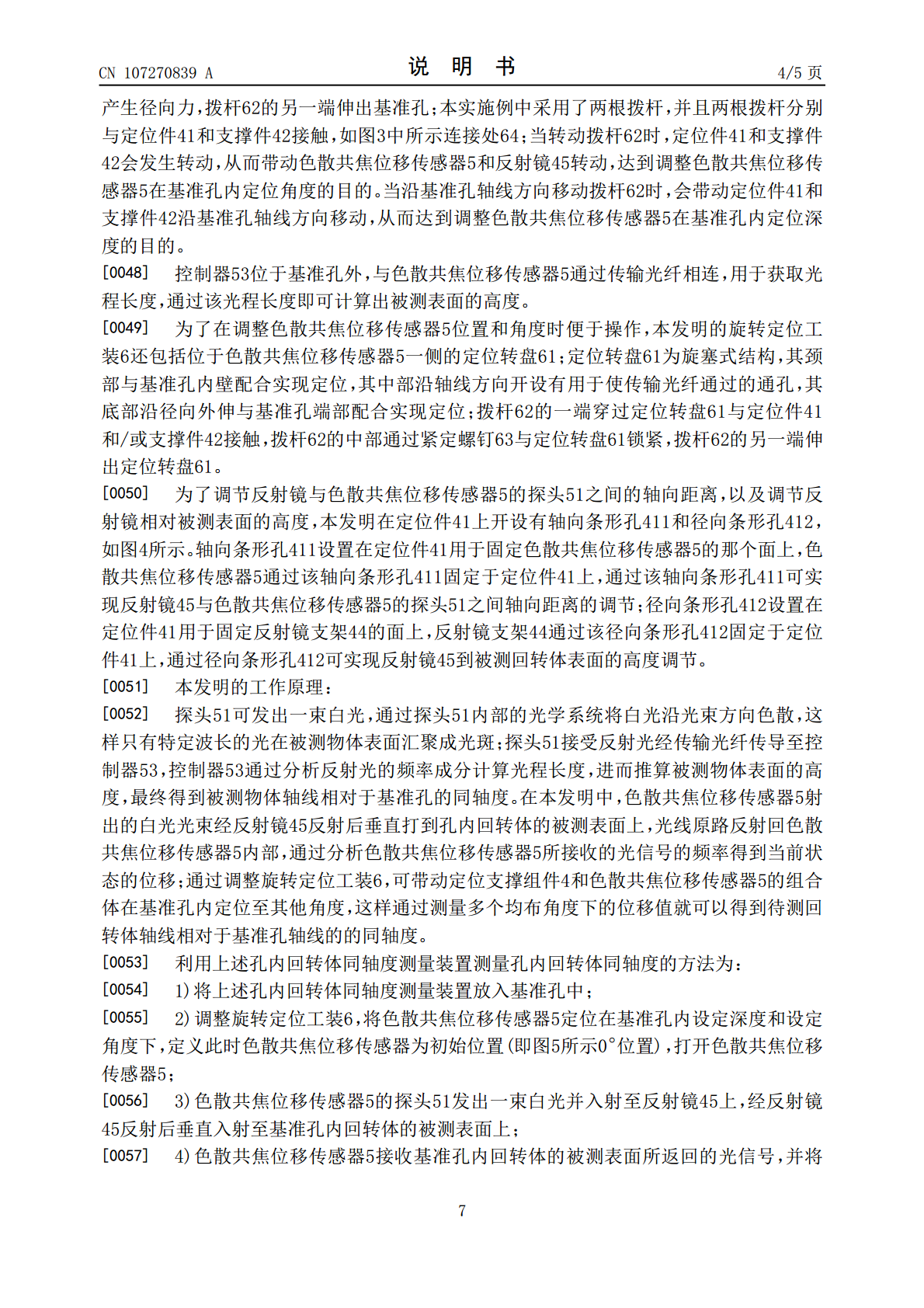
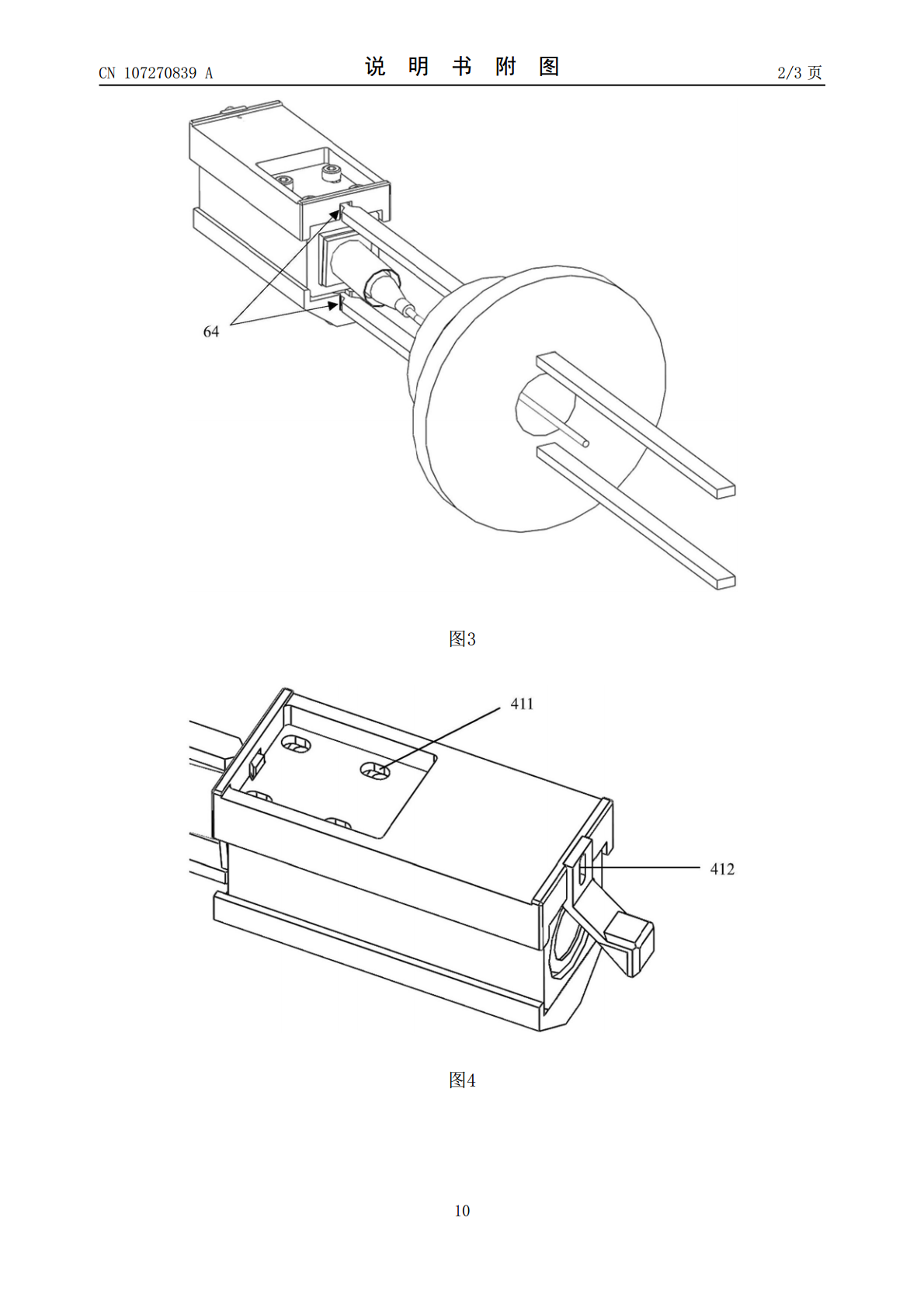
本发明提出了一种孔内回转体同轴度测量装置及方法,以解决现有方法无法定量测量狭小孔内回转体同轴度的问题。装置包括定位支撑组件、色散共焦位移传感器、反射镜、旋转定位工装及控制器;定位支撑组件包括定位件、支撑件和反射镜支架;定位支撑组件和色散共焦位移传感器整体位于基准孔内时,定位件的四个圆角和支撑件的弹性支撑点均与基准孔内壁紧密接触;反射镜通过反射镜支架固定,其位置姿态满足色散共焦位移传感器发出的光束经反射镜反射后垂直入射至回转体被测表面;旋转定位工装包括拨杆,拨杆可带动定位支撑组件旋转且不会对定位支撑组件产生

行星锥齿轮内孔同轴度测量装置.pdf
本发明公开了一种行星锥齿轮内孔同轴度测量装置,它由齿模、套体和卡尺。所述齿模为立置圆柱套构件,外壁与套体内孔同轴定位配合。齿模朝上的端面居中设有与待检行星锥齿轮同结构参数的齿形凹模,套体上段内孔和外壁外扩成薄壁结构,测量时先将待检行星锥齿轮置放在齿模的齿形凹模上定位,构成行星锥齿轮内孔壁与套体上段外壁平行相间,此长度用卡尺易测量,在不同方位测量,其长度差值便是所测量行星锥齿轮内孔与齿部同轴度误差值。本发明结构简单,对检测技术条件要求低,适合生产线有关工位配置,有利于实时检测,避免发生批量报废事故。
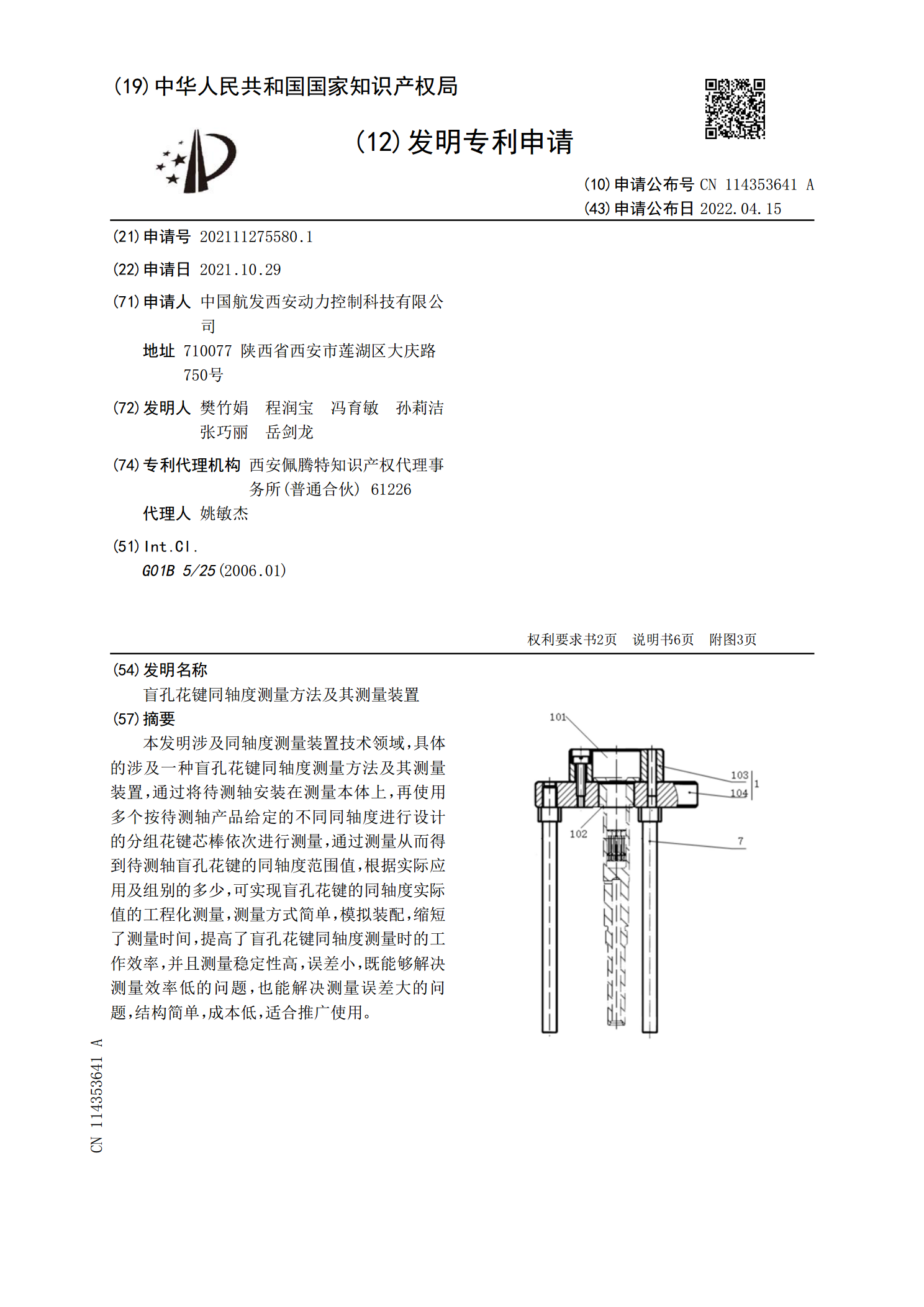
盲孔花键同轴度测量方法及其测量装置.pdf
本发明涉及同轴度测量装置技术领域,具体的涉及一种盲孔花键同轴度测量方法及其测量装置,通过将待测轴安装在测量本体上,再使用多个按待测轴产品给定的不同同轴度进行设计的分组花键芯棒依次进行测量,通过测量从而得到待测轴盲孔花键的同轴度范围值,根据实际应用及组别的多少,可实现盲孔花键的同轴度实际值的工程化测量,测量方式简单,模拟装配,缩短了测量时间,提高了盲孔花键同轴度测量时的工作效率,并且测量稳定性高,误差小,既能够解决测量效率低的问题,也能解决测量误差大的问题,结构简单,成本低,适合推广使用。

检测上下同轴盲孔内圆同轴度偏差的测量装置及测量方法.pdf
本发明涉及一种检测上下同轴盲孔内圆同轴度偏差的测量装置及测量方法,可调基准平板组件的基准平板上有滑动螺杆滑轮轴承组件滑动的滑槽,长条通滑槽中心线两侧对称位置有两定螺杆滑轮轴承组件。带吸附支架的百分表组件的吸附支架上有安装百分表的松紧装置。测量时,可调基准平板组件置于下盲孔孔壁上,使三个螺杆滑轮轴承组件与下盲孔孔壁相切并紧固定位。固定带吸附支架的百分表组件,调节百分表至合适测量高度,进行数值校正。旋转可调基准平板组件带动百分表在上盲孔内旋转,检测出各处的跳动偏差数值,再求出上下同轴盲孔内圆同轴度偏差。本发明
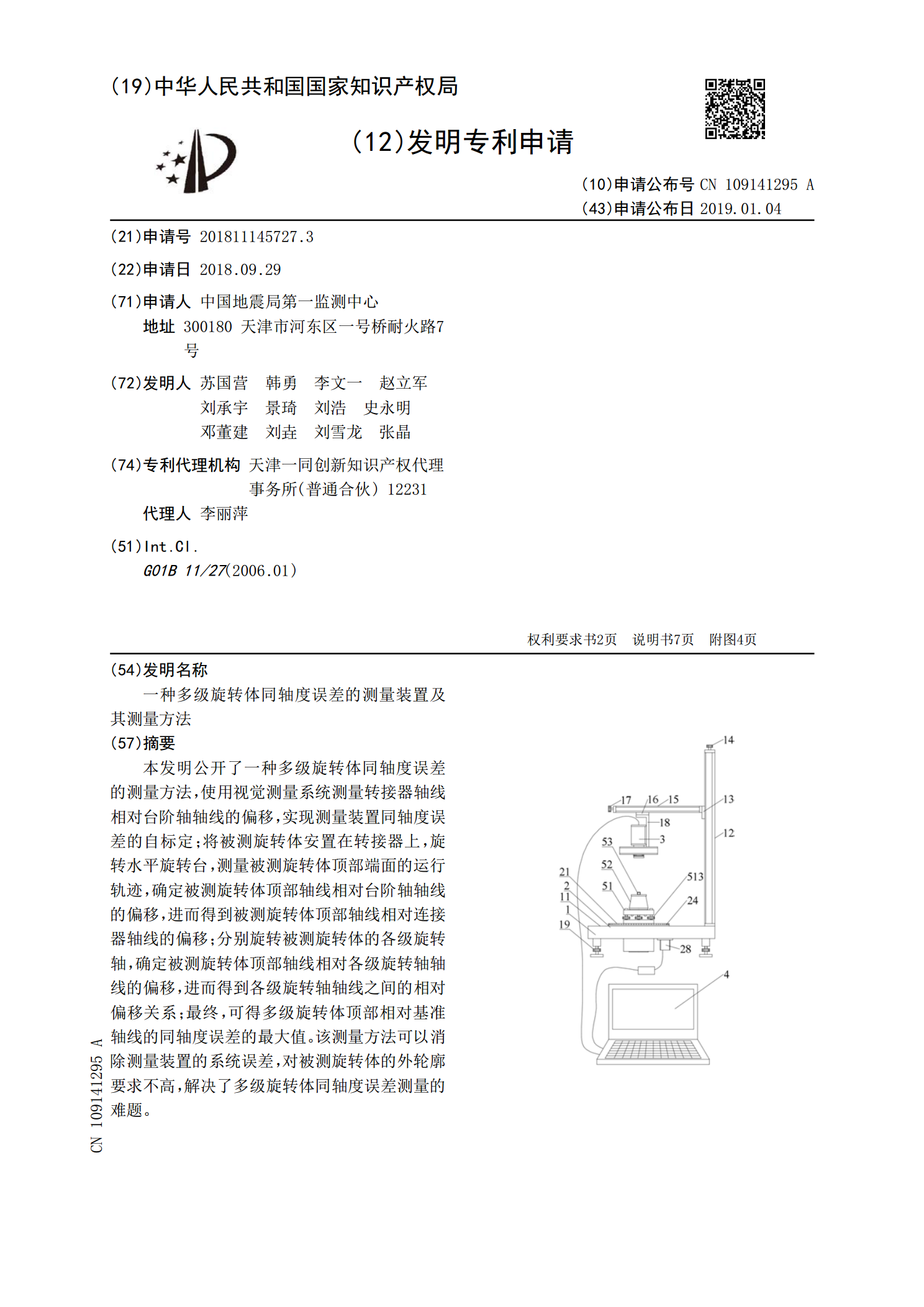
一种多级旋转体同轴度误差的测量装置及其测量方法.pdf
本发明公开了一种多级旋转体同轴度误差的测量方法,使用视觉测量系统测量转接器轴线相对台阶轴轴线的偏移,实现测量装置同轴度误差的自标定;将被测旋转体安置在转接器上,旋转水平旋转台,测量被测旋转体顶部端面的运行轨迹,确定被测旋转体顶部轴线相对台阶轴轴线的偏移,进而得到被测旋转体顶部轴线相对连接器轴线的偏移;分别旋转被测旋转体的各级旋转轴,确定被测旋转体顶部轴线相对各级旋转轴轴线的偏移,进而得到各级旋转轴轴线之间的相对偏移关系;最终,可得多级旋转体顶部相对基准轴线的同轴度误差的最大值。该测量方法可以消除测量装置的