
一种机器人运动底盘以及机器人.pdf

韶敏****ab

1/8

2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机器人运动底盘以及机器人.pdf
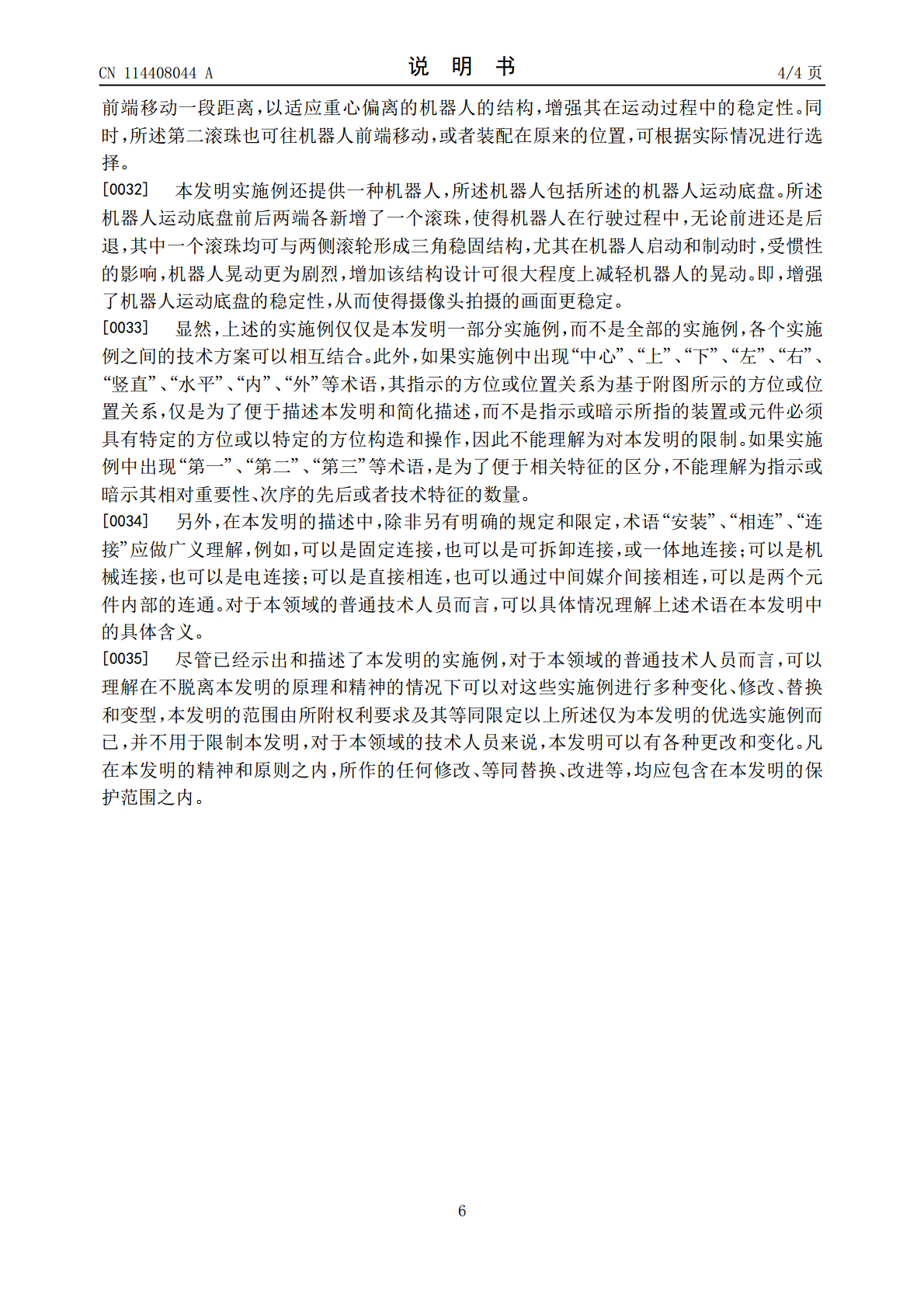
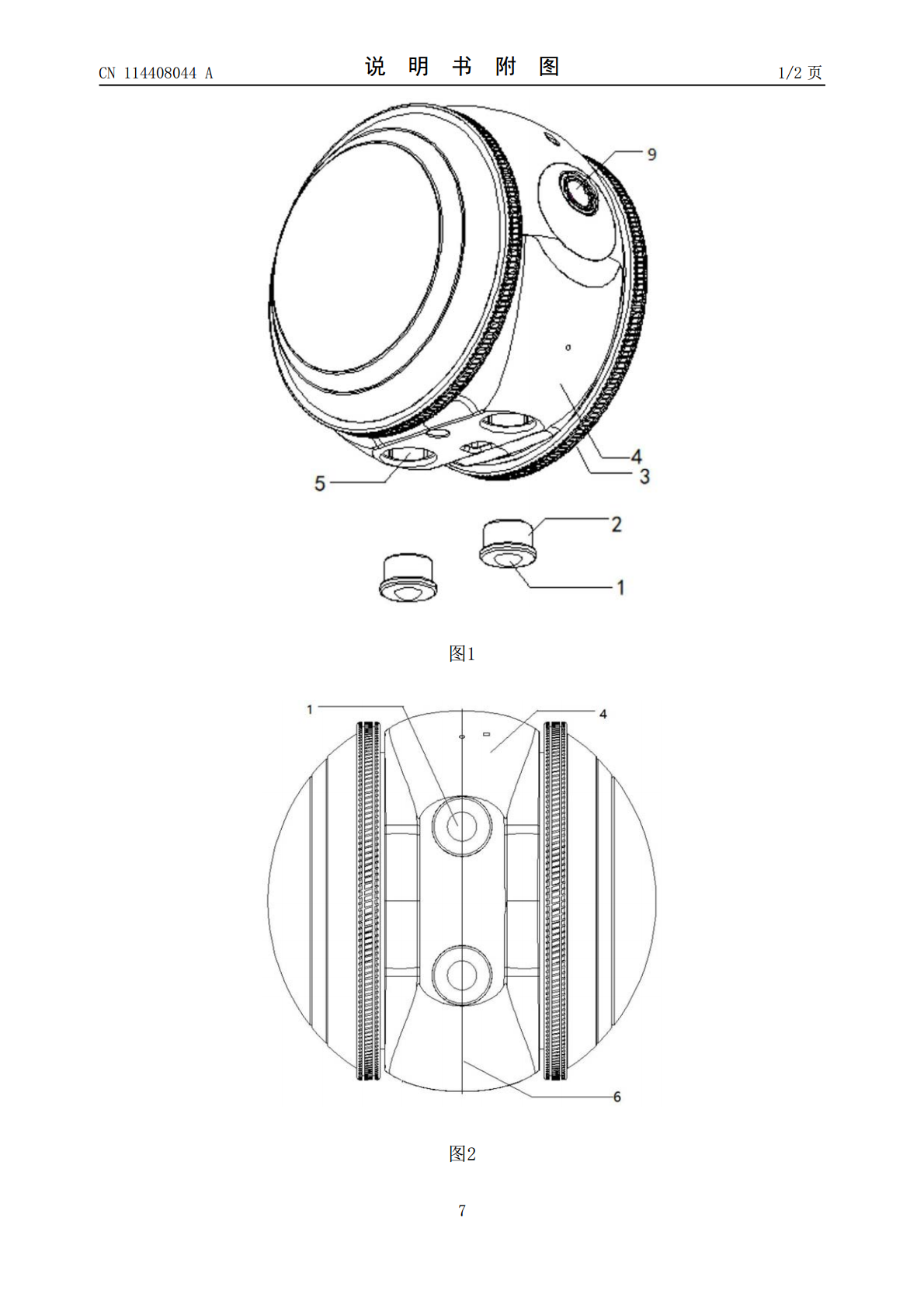
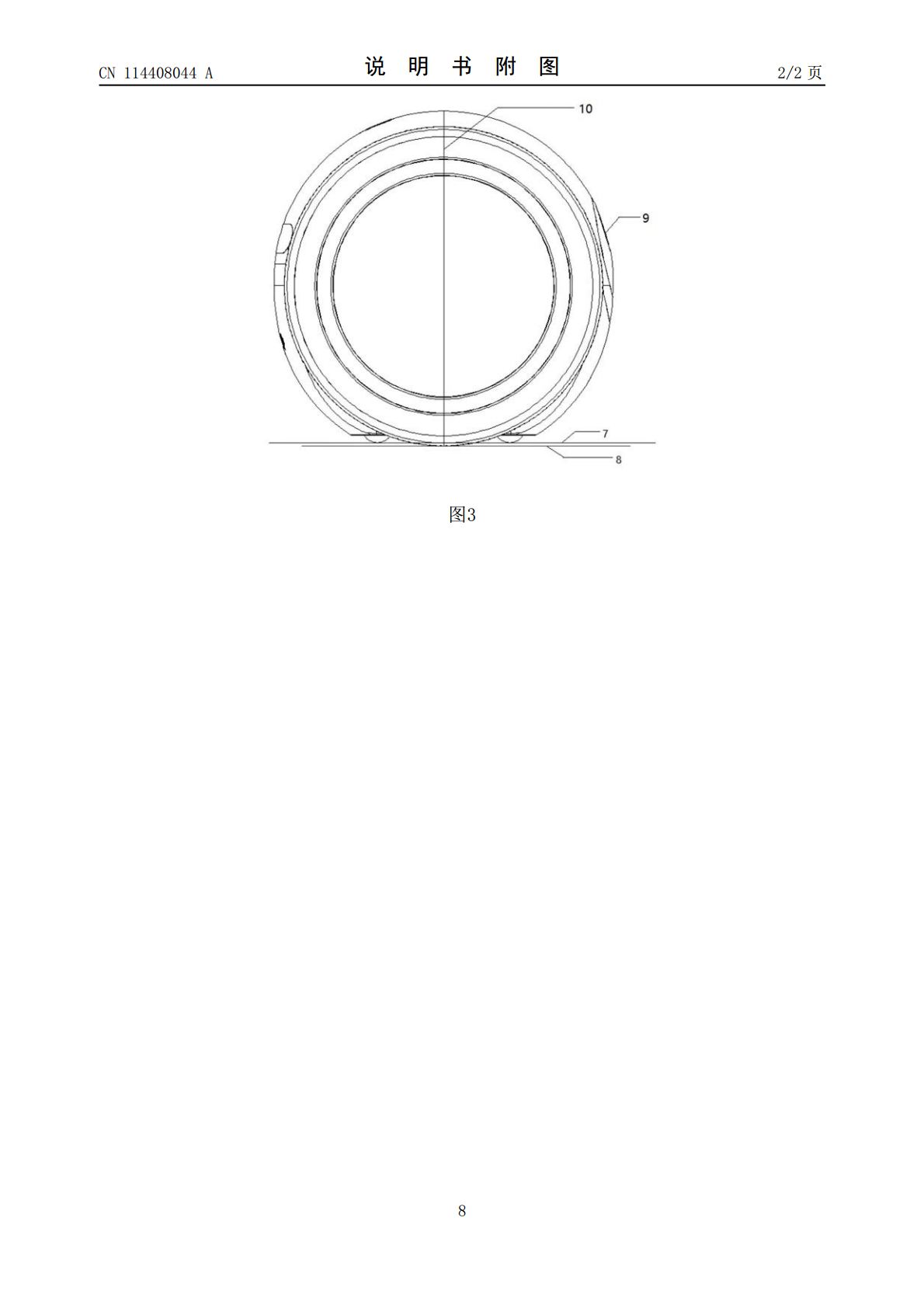
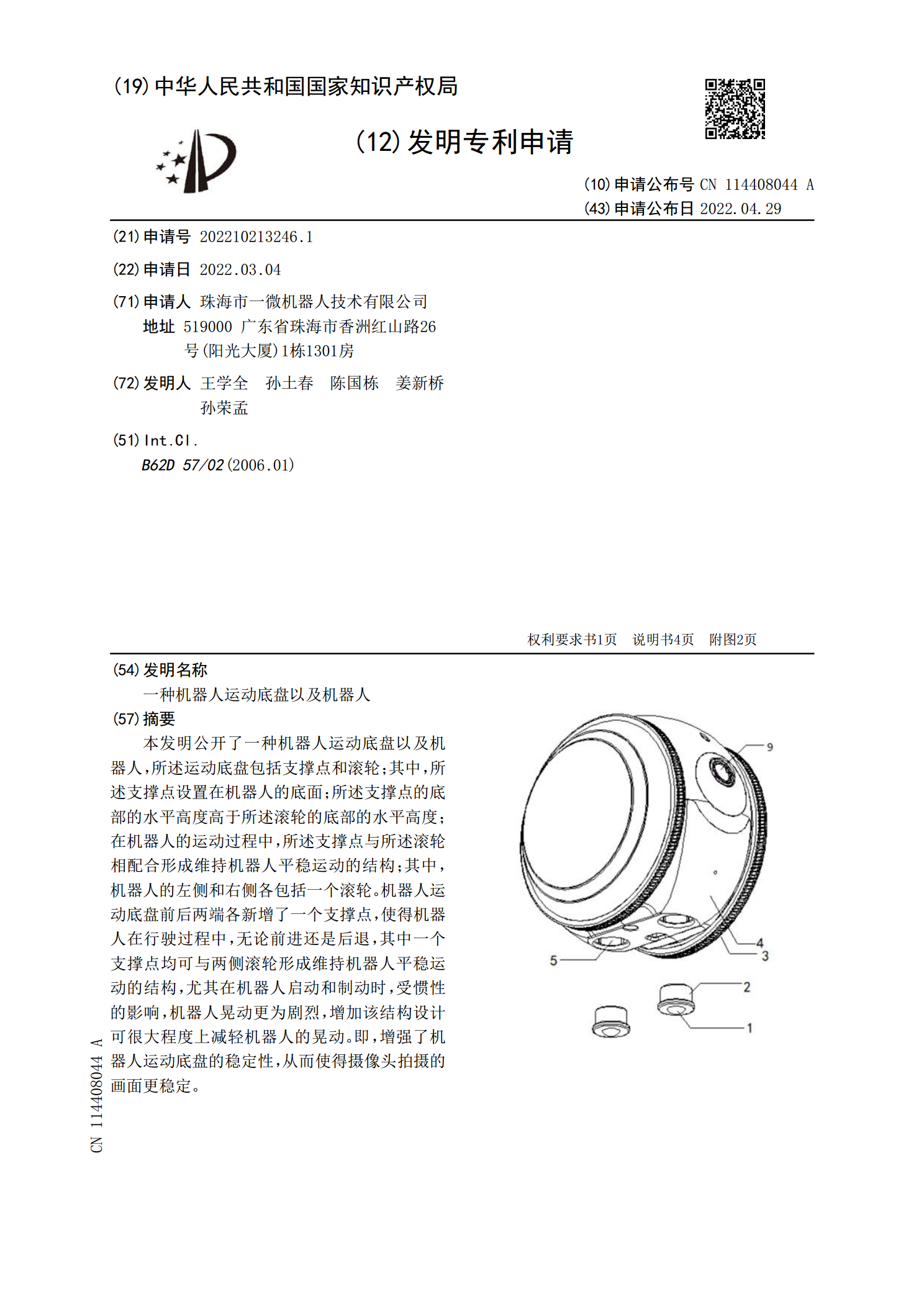
本发明公开了一种机器人运动底盘以及机器人,所述运动底盘包括支撑点和滚轮;其中,所述支撑点设置在机器人的底面;所述支撑点的底部的水平高度高于所述滚轮的底部的水平高度;在机器人的运动过程中,所述支撑点与所述滚轮相配合形成维持机器人平稳运动的结构;其中,机器人的左侧和右侧各包括一个滚轮。机器人运动底盘前后两端各新增了一个支撑点,使得机器人在行驶过程中,无论前进还是后退,其中一个支撑点均可与两侧滚轮形成维持机器人平稳运动的结构,尤其在机器人启动和制动时,受惯性的影响,机器人晃动更为剧烈,增加该结构设计可很大程度上
底盘以及具有该底盘的机器人.pdf
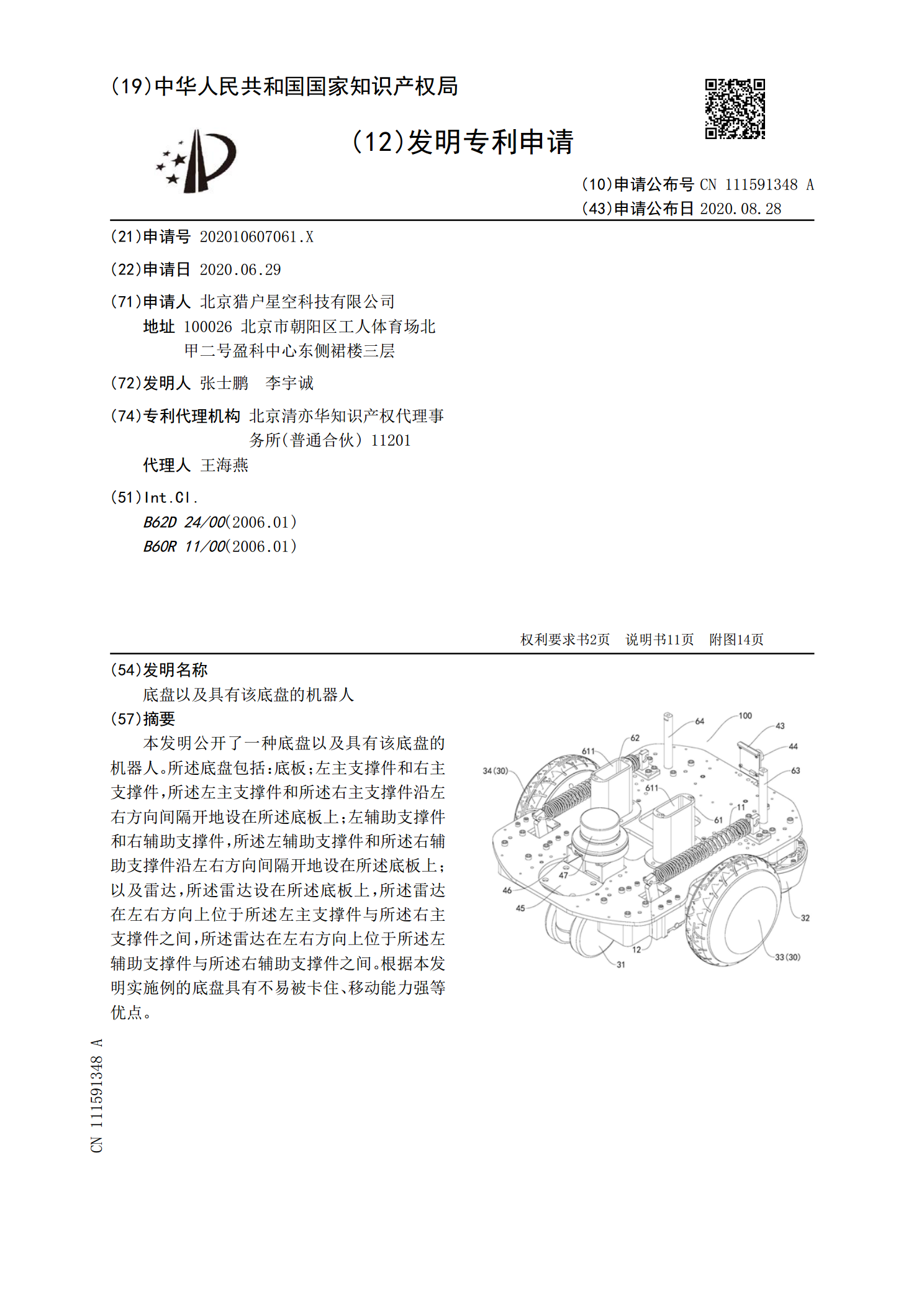
本发明公开了一种底盘以及具有该底盘的机器人。所述底盘包括:底板;左主支撑件和右主支撑件,所述左主支撑件和所述右主支撑件沿左右方向间隔开地设在所述底板上;左辅助支撑件和右辅助支撑件,所述左辅助支撑件和所述右辅助支撑件沿左右方向间隔开地设在所述底板上;以及雷达,所述雷达设在所述底板上,所述雷达在左右方向上位于所述左主支撑件与所述右主支撑件之间,所述雷达在左右方向上位于所述左辅助支撑件与所述右辅助支撑件之间。根据本发明实施例的底盘具有不易被卡住、移动能力强等优点。

机器人底盘结构以及机器人.pdf
本发明公开一种机器人底盘结构以及机器人,该机器人底盘结构包括底部结构以及设于底部结构上的躯干结构,底部结构的底面设置有两个轮毂电机和两个导向轮,且两个轮毂电机同轴间隔设置,两个导向轮间隔设于两个轮毂电机连线的中垂线上,躯干结构包括立柱、横杆以及安装杆,立柱的数量有四根,四根立柱竖向设置于底部结构上形成矩形,相邻立柱之间连接有水平设置的若干横杆,横杆与立柱可拆卸连接,安装柱与横杆或立杆可拆卸连接,安装柱用于安装机器人的配件。本发明的技术方案能够改变机器人底盘结构造型,达到自由设计机器人底盘结构造型的目的,使
一种越野式底盘部件以及机器人总成.pdf
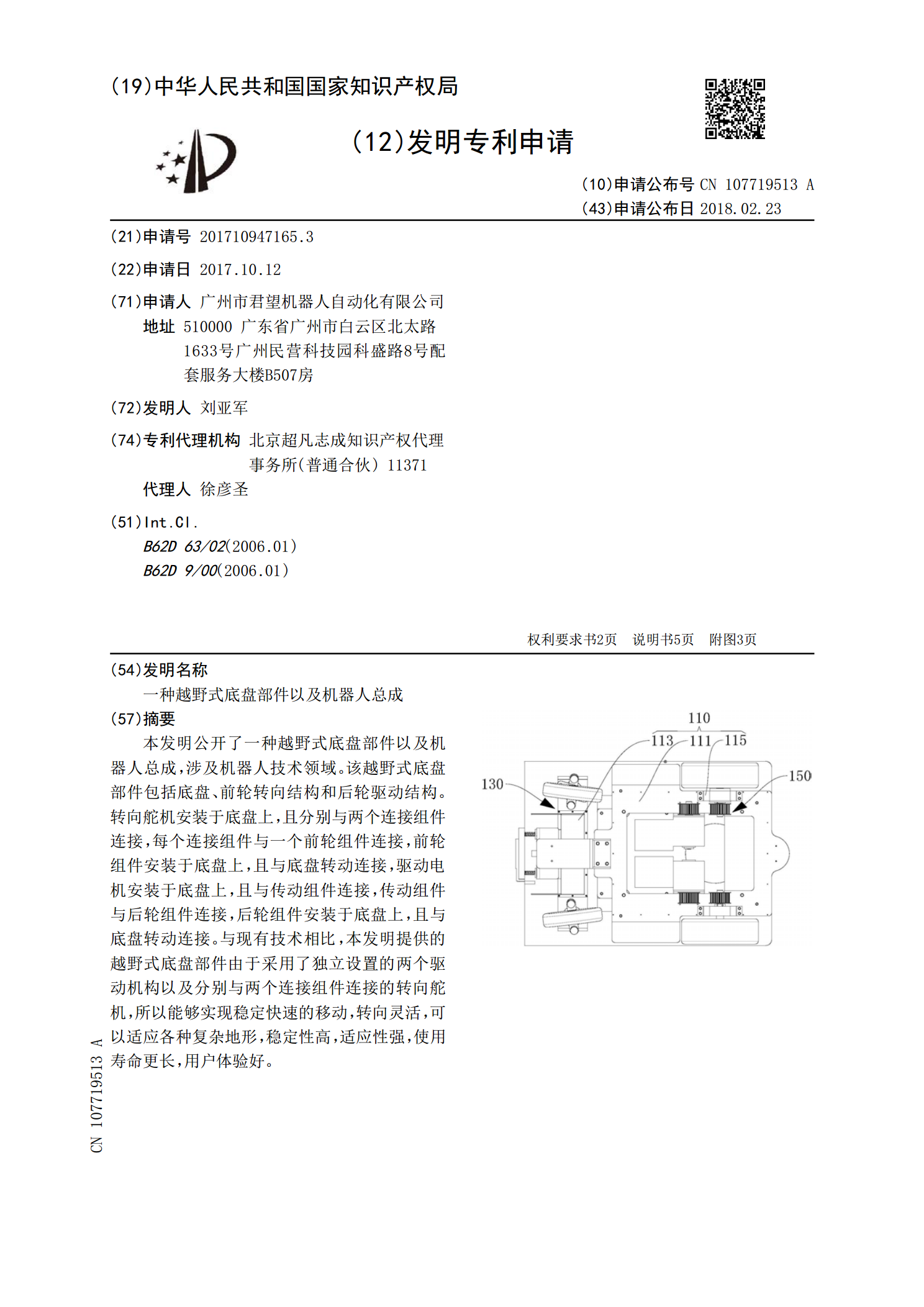
本发明公开了一种越野式底盘部件以及机器人总成,涉及机器人技术领域。该越野式底盘部件包括底盘、前轮转向结构和后轮驱动结构。转向舵机安装于底盘上,且分别与两个连接组件连接,每个连接组件与一个前轮组件连接,前轮组件安装于底盘上,且与底盘转动连接,驱动电机安装于底盘上,且与传动组件连接,传动组件与后轮组件连接,后轮组件安装于底盘上,且与底盘转动连接。与现有技术相比,本发明提供的越野式底盘部件由于采用了独立设置的两个驱动机构以及分别与两个连接组件连接的转向舵机,所以能够实现稳定快速的移动,转向灵活,可以适应各种复杂
用于机器人的转向驱动轮、机器人运动底盘及一种机器人.pdf
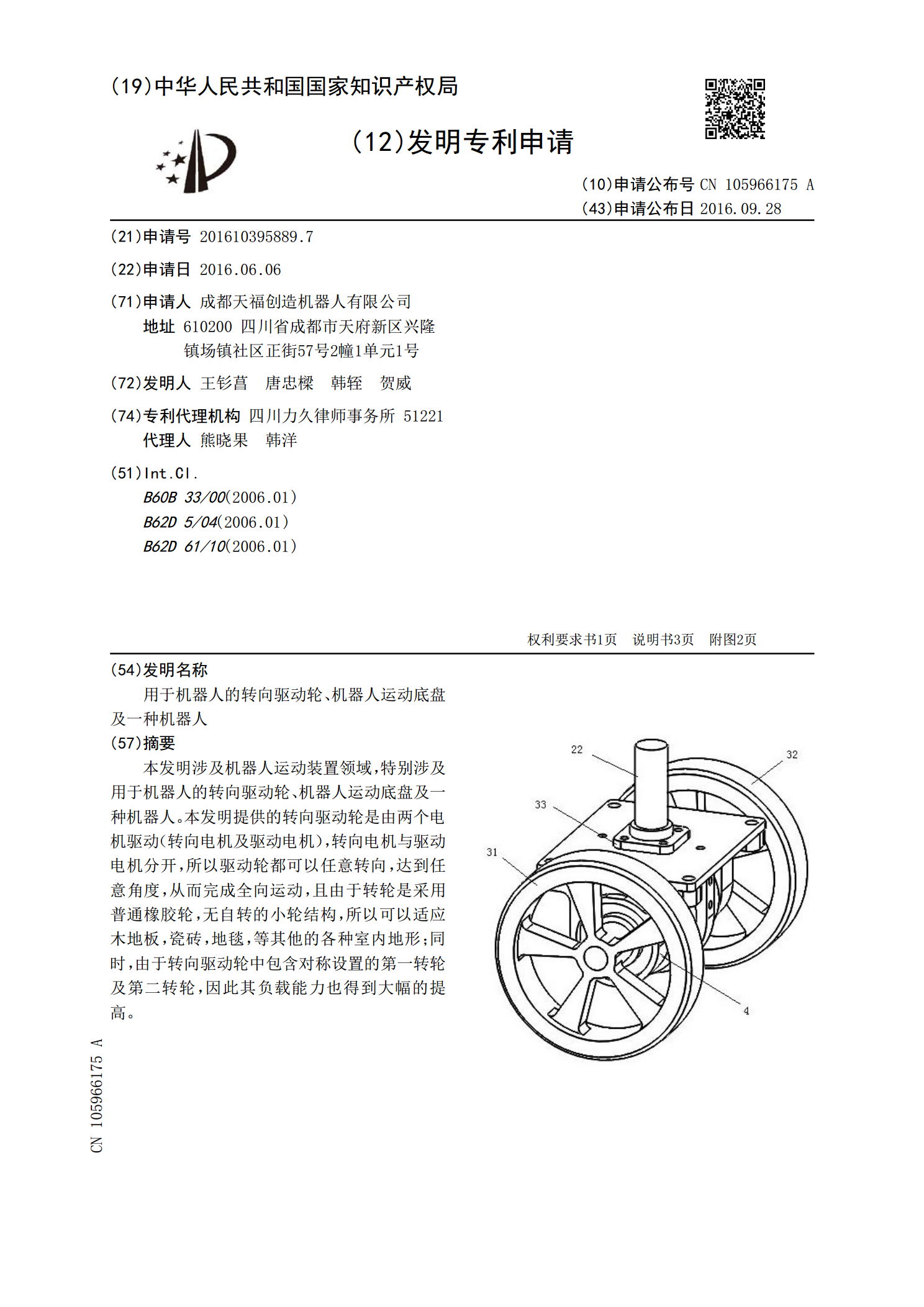
本发明涉及机器人运动装置领域,特别涉及用于机器人的转向驱动轮、机器人运动底盘及一种机器人。本发明提供的转向驱动轮是由两个电机驱动(转向电机及驱动电机),转向电机与驱动电机分开,所以驱动轮都可以任意转向,达到任意角度,从而完成全向运动,且由于转轮是采用普通橡胶轮,无自转的小轮结构,所以可以适应木地板,瓷砖,地毯,等其他的各种室内地形;同时,由于转向驱动轮中包含对称设置的第一转轮及第二转轮,因此其负载能力也得到大幅的提高。