
一种抓手装置及其物料移送系统.pdf

明钰****甜甜

1/9

2/9

3/9
4/9

5/9
6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种抓手装置及其物料移送系统.pdf
本发明公开的一种抓手装置及其物料移送系统,包括安装座、上夹手和下夹手机构,上夹手连接固定于安装座上,其上设置有位于物料上方的夹取支撑点;下夹手机构包括动力驱动部、下夹头和夹头转动件,上夹手的夹取支撑点侧旁的待抓取物料外缘还设有用于对夹头转动件中部旋转支撑的转轴支点;夹头转动件一端由动力驱动部驱动,夹头转动件的另一自由端上固定连接下夹头;动力驱动部驱动夹头转动件以转轴支点为旋转中心、带动自由端连接的下夹头偏转一定角度,下夹头由待抓取物料下方承托并相对上方的夹取支撑点将物料压紧夹持,通过抓手装置实现物料的自动
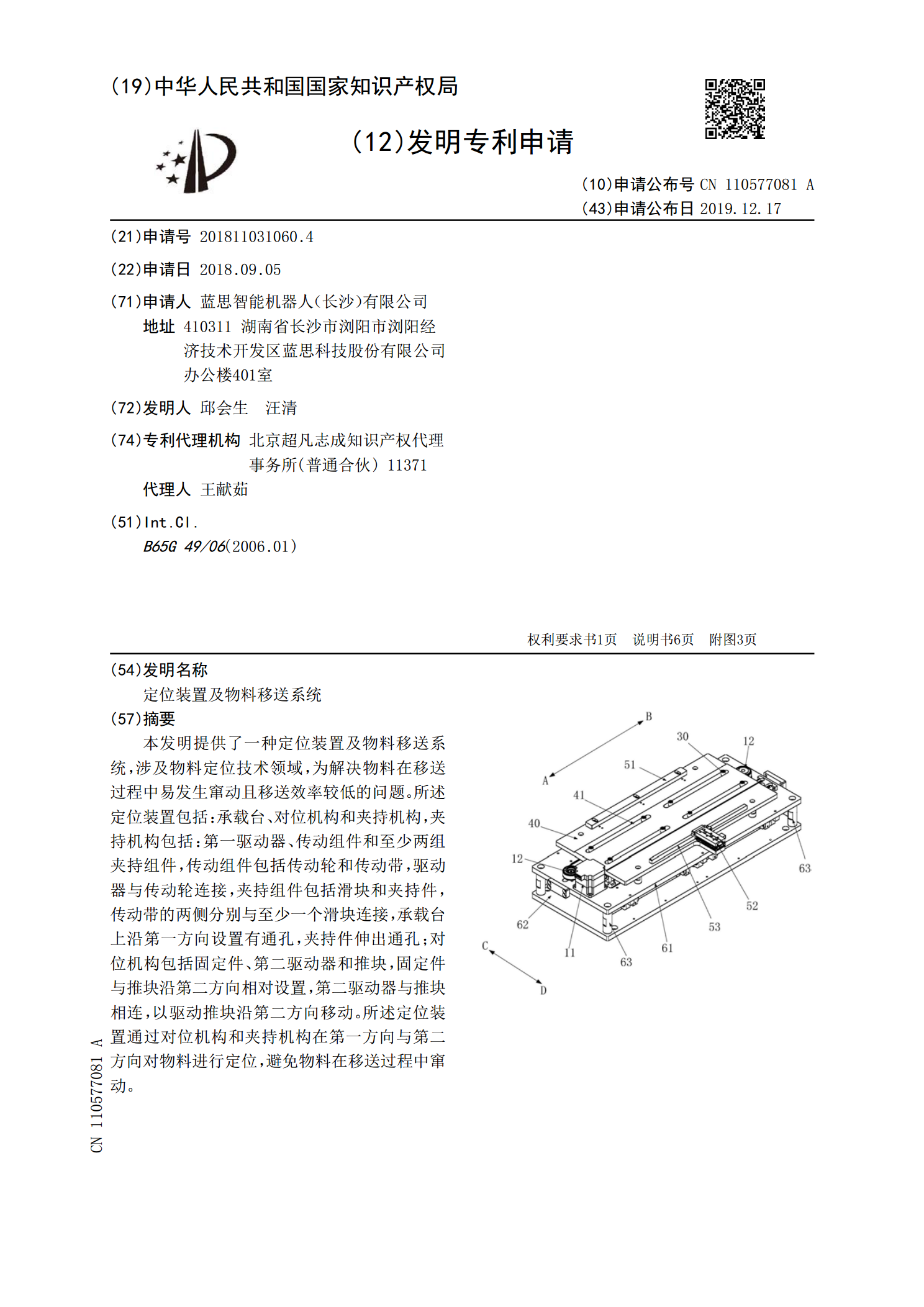
定位装置及物料移送系统.pdf
本发明提供了一种定位装置及物料移送系统,涉及物料定位技术领域,为解决物料在移送过程中易发生窜动且移送效率较低的问题。所述定位装置包括:承载台、对位机构和夹持机构,夹持机构包括:第一驱动器、传动组件和至少两组夹持组件,传动组件包括传动轮和传动带,驱动器与传动轮连接,夹持组件包括滑块和夹持件,传动带的两侧分别与至少一个滑块连接,承载台上沿第一方向设置有通孔,夹持件伸出通孔;对位机构包括固定件、第二驱动器和推块,固定件与推块沿第二方向相对设置,第二驱动器与推块相连,以驱动推块沿第二方向移动。所述定位装置通过对位
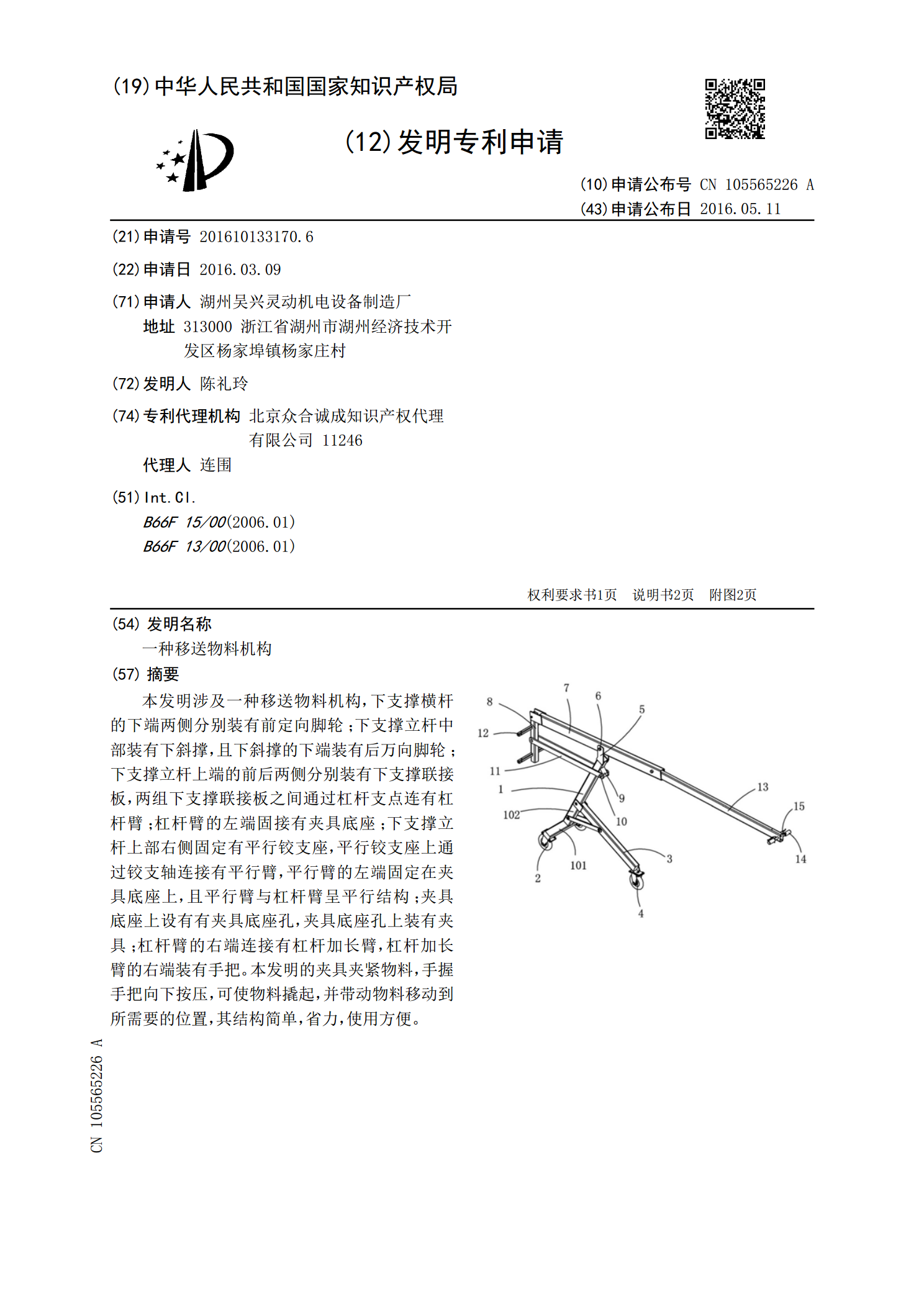
一种移送物料机构.pdf
本发明涉及一种移送物料机构,下支撑横杆的下端两侧分别装有前定向脚轮;下支撑立杆中部装有下斜撑,且下斜撑的下端装有后万向脚轮;下支撑立杆上端的前后两侧分别装有下支撑联接板,两组下支撑联接板之间通过杠杆支点连有杠杆臂;杠杆臂的左端固接有夹具底座;下支撑立杆上部右侧固定有平行铰支座,平行铰支座上通过铰支轴连接有平行臂,平行臂的左端固定在夹具底座上,且平行臂与杠杆臂呈平行结构;夹具底座上设有有夹具底座孔,夹具底座孔上装有夹具;杠杆臂的右端连接有杠杆加长臂,杠杆加长臂的右端装有手把。本发明的夹具夹紧物料,手握手把向

一种包装箱自动码垛移送装置及其移送方法.pdf
本发明公开了一种包装箱自动码垛移送装置及其移送方法,包括:底座,所述底座上设置有升降机构,所述底座底部设置有移出机构,当升降机构降到最低位置后,滚轮输送机构将包装箱体移出升降机构,所述底座一侧设置有与滚轮输送机构相配合的水平运输机构;所述升降机构设置于高层水平传输机构末端,通过设置升降机构,能够与高层水平传输机构相配合,将高处的包装箱体,能够整齐的码垛,形成多箱垂直码齐,并且稳定的移送到低处,再通过滚轮输送机构和水平运输机构将码垛的箱体水平输出,使得箱体能够整齐的输出,不用人工进行搬运,降低人工劳动力,提
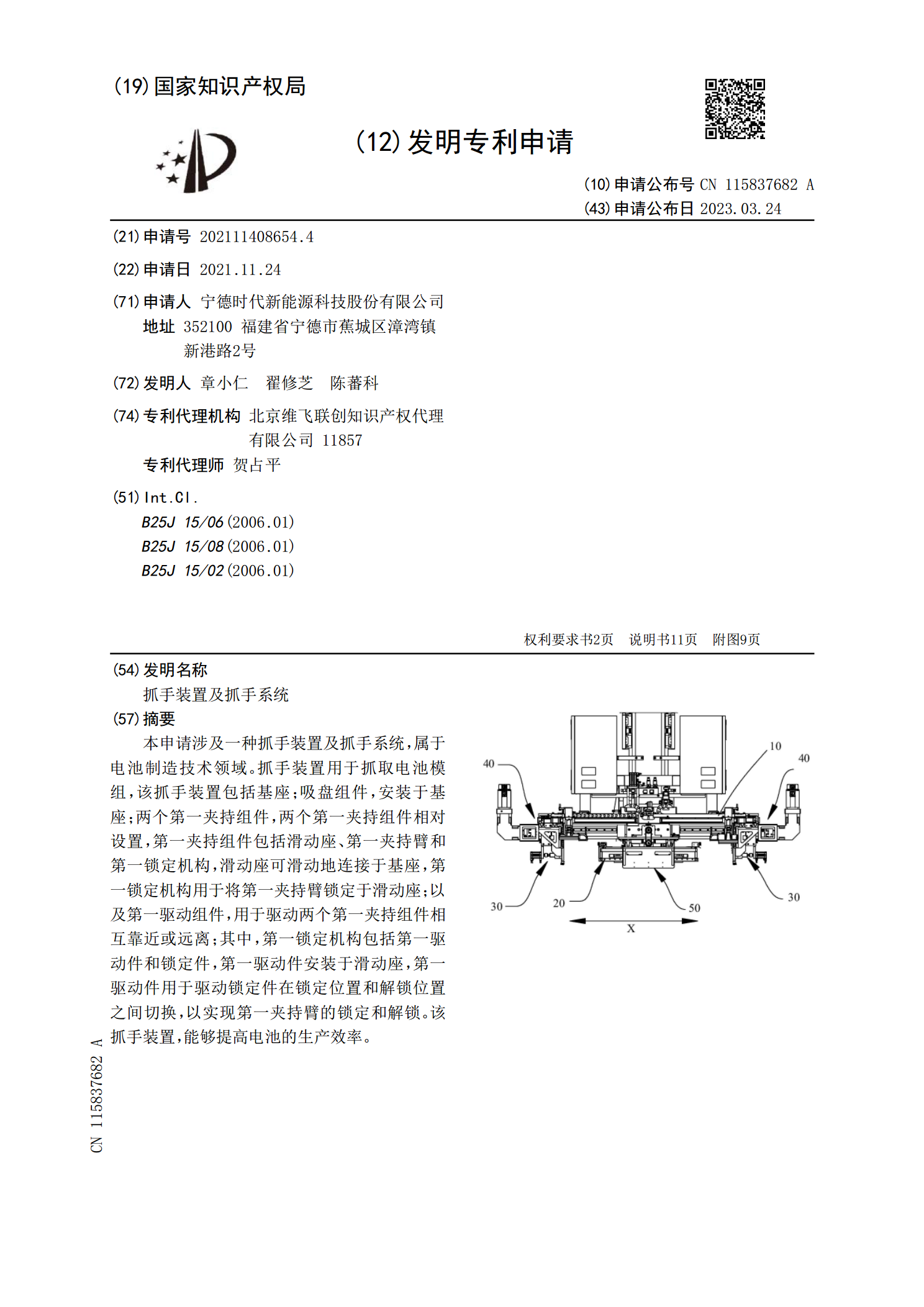
抓手装置及抓手系统.pdf
本申请涉及一种抓手装置及抓手系统,属于电池制造技术领域。抓手装置用于抓取电池模组,该抓手装置包括基座;吸盘组件,安装于基座;两个第一夹持组件,两个第一夹持组件相对设置,第一夹持组件包括滑动座、第一夹持臂和第一锁定机构,滑动座可滑动地连接于基座,第一锁定机构用于将第一夹持臂锁定于滑动座;以及第一驱动组件,用于驱动两个第一夹持组件相互靠近或远离;其中,第一锁定机构包括第一驱动件和锁定件,第一驱动件安装于滑动座,第一驱动件用于驱动锁定件在锁定位置和解锁位置之间切换,以实现第一夹持臂的锁定和解锁。该抓手装置,能够