
一种龙形双足行走机器人及行走方法.pdf

是翠****ng

1/10
2/10

3/10
4/10

5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种龙形双足行走机器人及行走方法.pdf
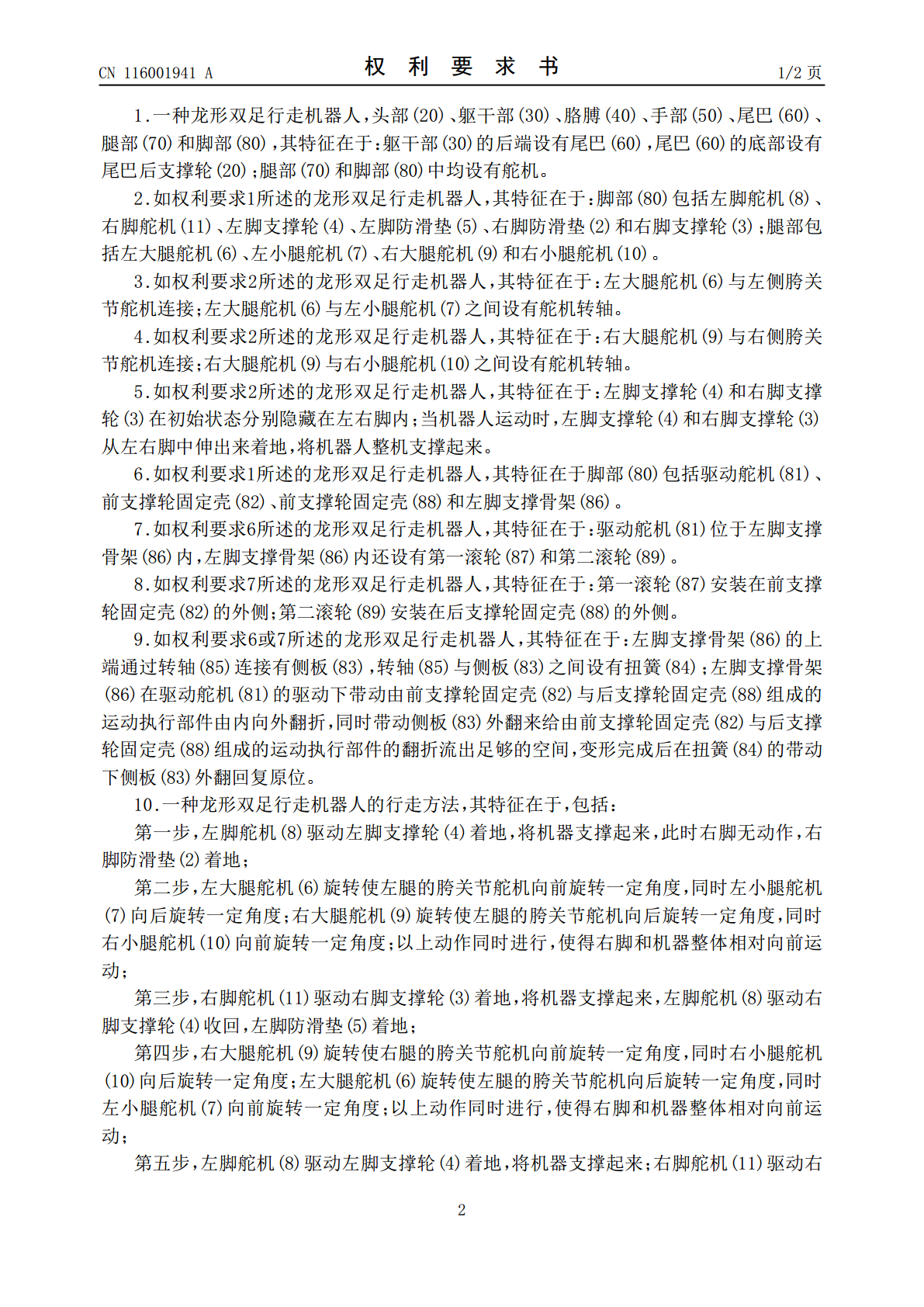
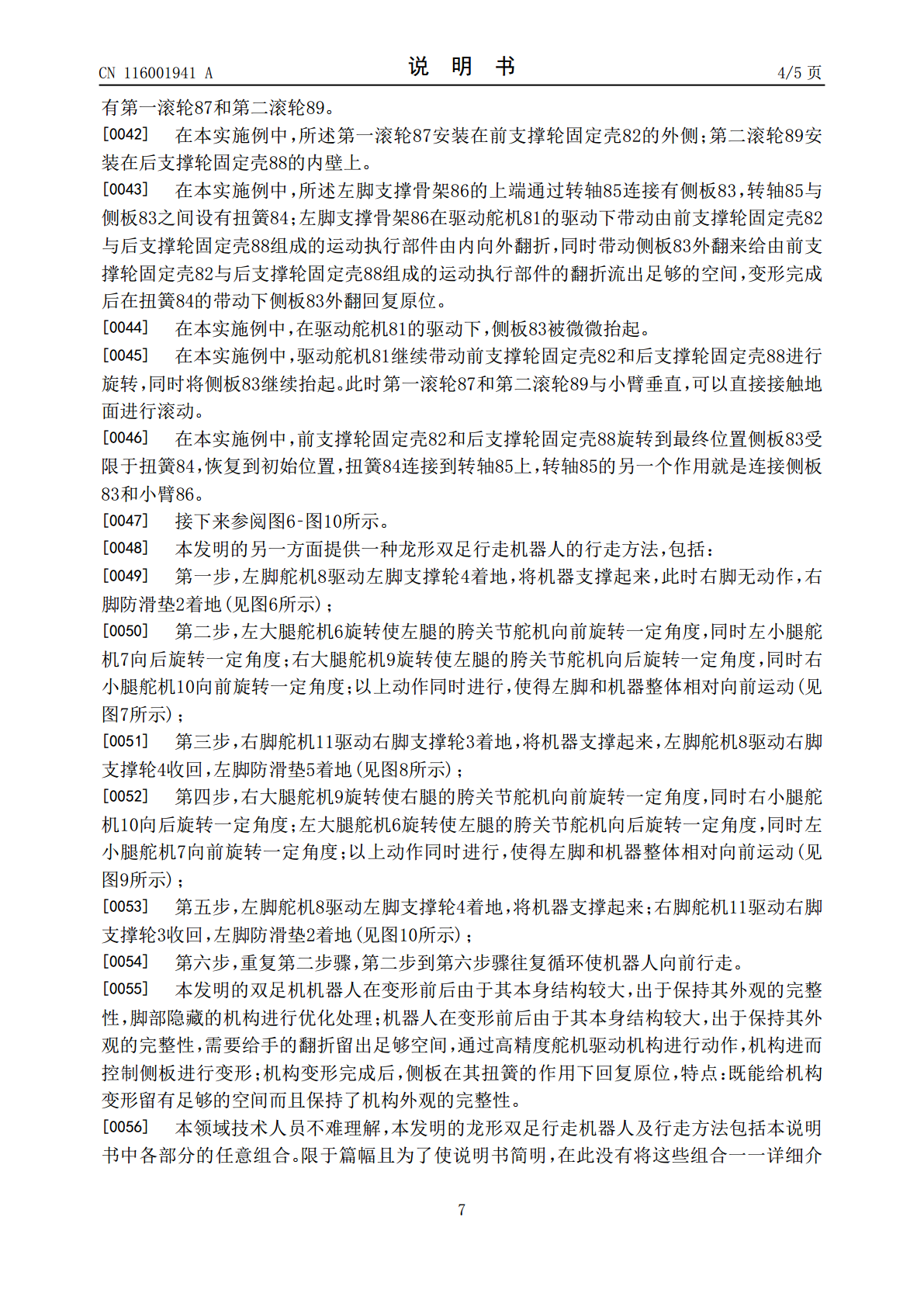
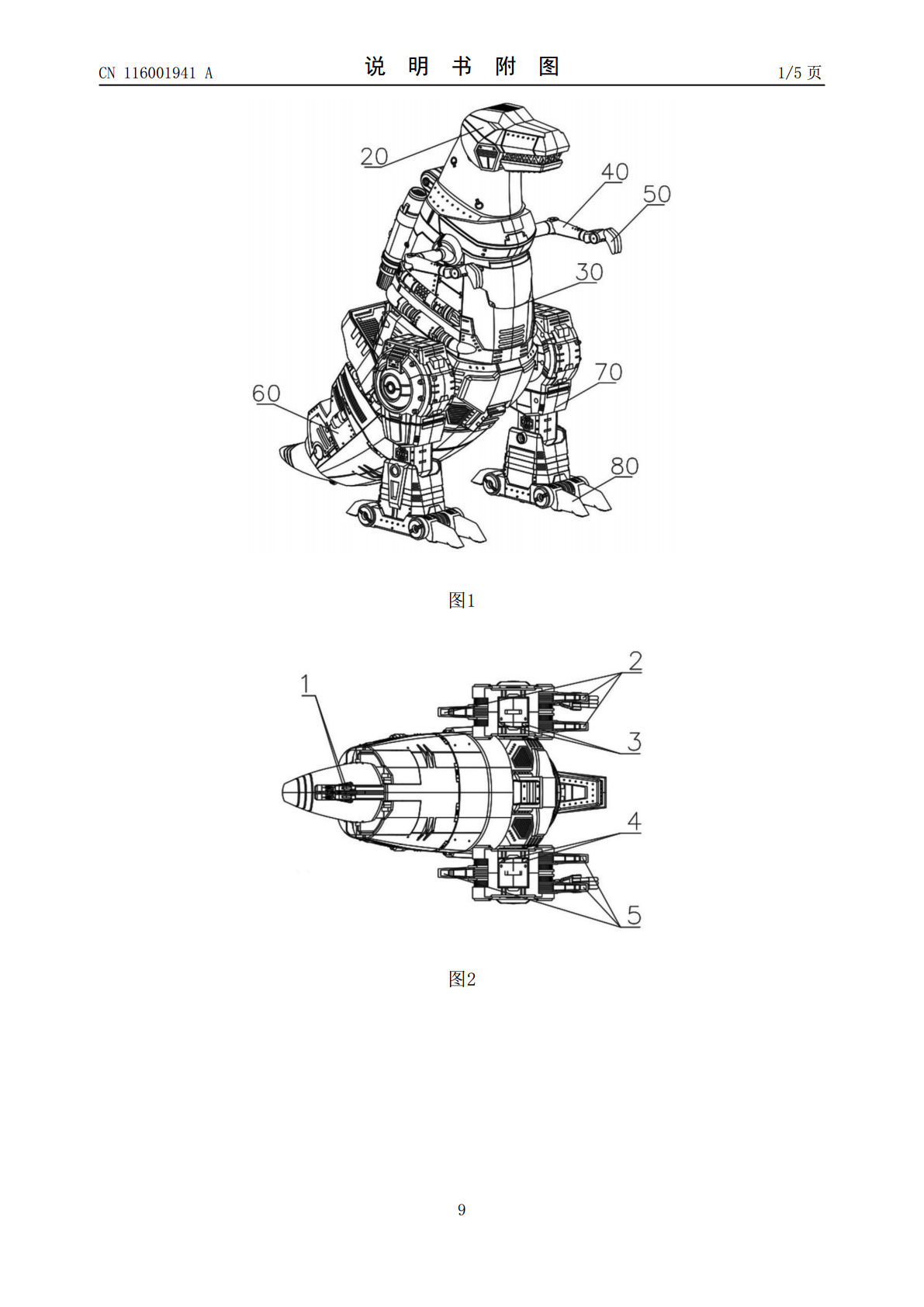
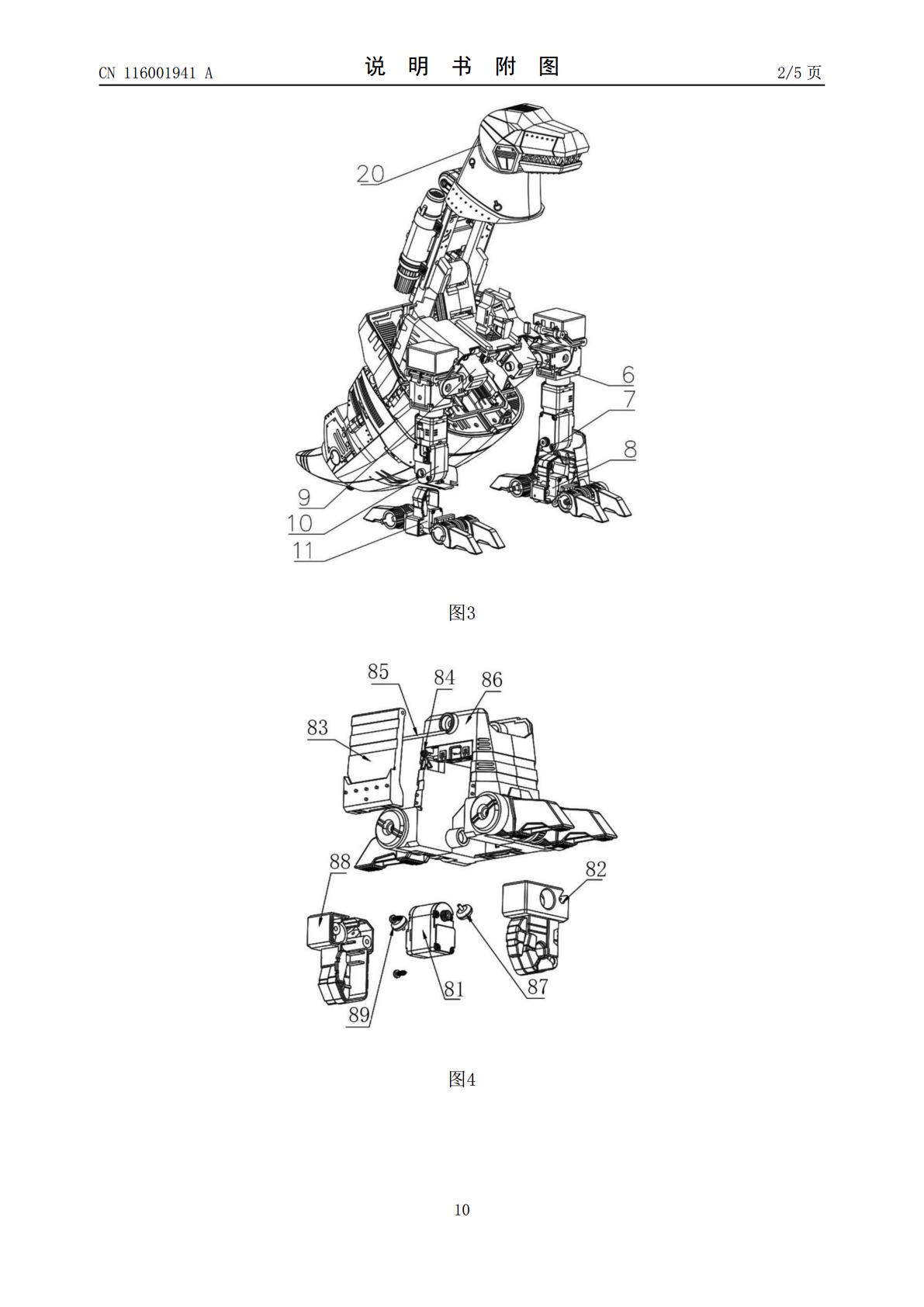
本发明涉及一种龙形双足行走机器人及行走方法,头部(20)、躯干部(30)、胳膊(40)、手部(50)、尾巴(60)、腿部(70)和脚部(80),所述尾巴(60)的底部设有尾巴支撑轮(1);腿部(70)和脚部(80)中均设有舵机。尾巴(60)为增加了一个保持平衡的支撑点,前面两个脚分别通过支撑起各自一侧的滚轮来使其相对运动,另一侧的脚通过向后方施加作用力从而达到使其整体向前运动的功能,创新性的将各个动作组合起来,虽然与地面接触的双足都未曾离开地面,却能使得机器向前或者向后或者转弯能各种运动;既能使机器人像人

一种双足行走机器人.pdf
本发明涉及机器人技术领域,尤其是一种双足行走机器人,包括四边形框架,所述四边形框架内部设有动力传输机构,所述旋转电机的动力输出轴上固接有第四带轮,所述第四带轮通过皮带与固接在中间转轴上的第三带轮连接,中间转轴上同轴固接有两个第二带轮,两个第二带轮分别置于第三带轮两侧,每个连接板上均转动连接有一个竖直设置的支撑板,每个支撑板底端均固接有一个支撑脚,旋转电机上连接有plc控制器,所述plc控制器连接有自动避障模块、语音播报模块、无线控制模块。本装置结构简单,使用方便,制造成本很低,运动过程中能够通过自动避障模

独轮双足行走机器人.pdf
本发明公开了一种独轮双足行走机器人,包括机体和安装在机体上的两条仿生腿,机体上还安装有轮腿,轮腿包括腿架和安装在腿架上的一个以上行走滚轮,腿架通过调节组件以能调节高度的方式安装在机体上。该独轮双足行走机器人具有运动灵活性好、适应能力强、适用范围广、结构简单紧凑、成本低廉等优点。
一种双足自主行走智能机器人.pdf
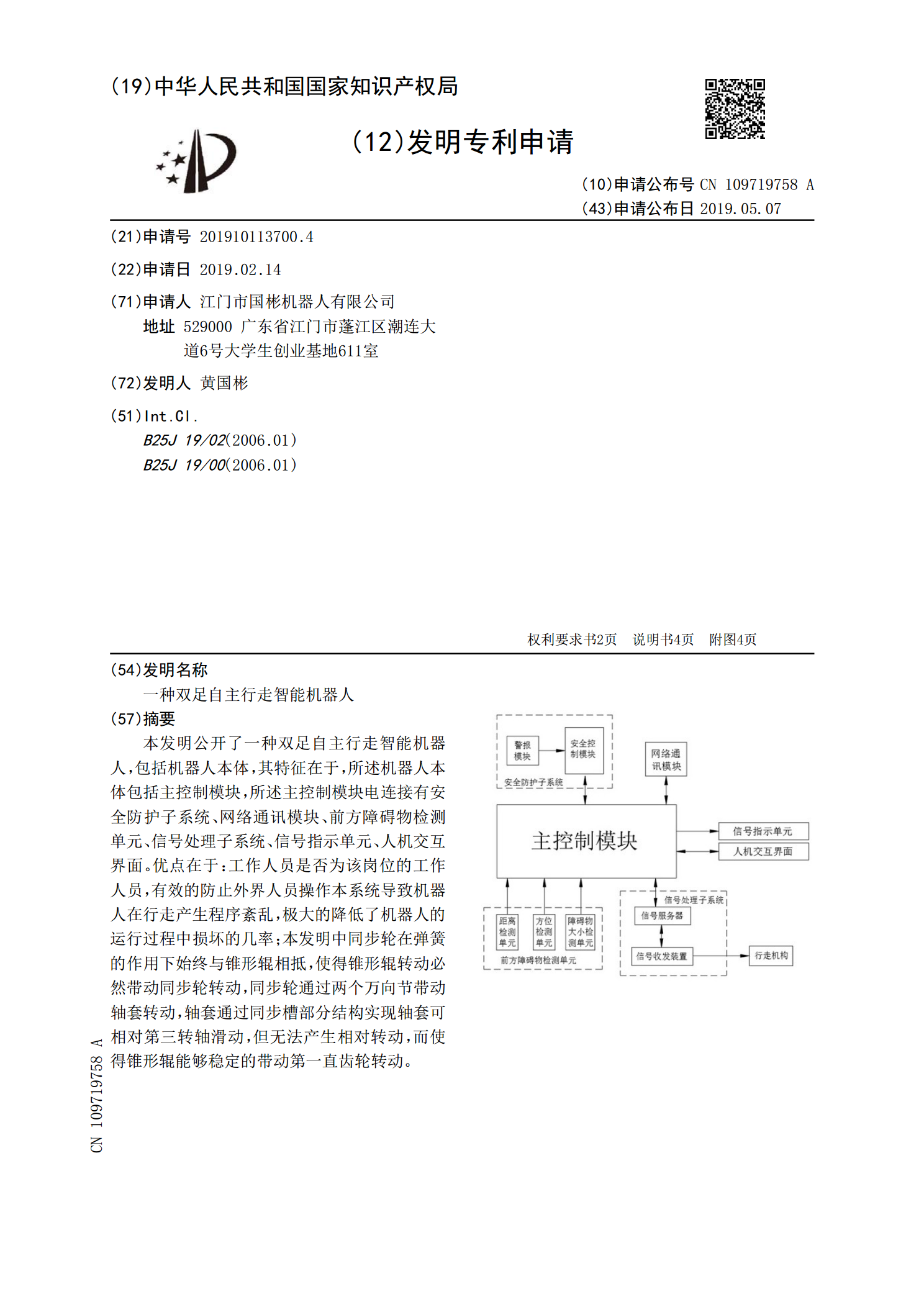
本发明公开了一种双足自主行走智能机器人,包括机器人本体,其特征在于,所述机器人本体包括主控制模块,所述主控制模块电连接有安全防护子系统、网络通讯模块、前方障碍物检测单元、信号处理子系统、信号指示单元、人机交互界面。优点在于:工作人员是否为该岗位的工作人员,有效的防止外界人员操作本系统导致机器人在行走产生程序紊乱,极大的降低了机器人的运行过程中损坏的几率;本发明中同步轮在弹簧的作用下始终与锥形辊相抵,使得锥形辊转动必然带动同步轮转动,同步轮通过两个万向节带动轴套转动,轴套通过同步槽部分结构实现轴套可相对第三

双足行走机器人相关研究.pdf
双足行走机器人相关研究日期:2009-8-711:16:08浏览:6来源:学海网收集整理作者:佚名摘要:双足步行机器人具有仿人的外形和步行方式、广泛的社会应用前景和多学科的融合等特点,是机器人研究中的一个热门领域。针对双足机器人简单步行的设计要求,提出了一组步态公式;基于双足步行机器人在平面上静态行走的特点,并结合仿生学的原理设计制作了机器人的机械结构。在力学分析时,将步行机器人简化为非闭链回转关节相联的多杆系统,根据双足机器人静态行走的特点,对机器人的力学分析作了简化;在控制上采用了以MCS-51单片机