
机器人的控制方法、装置、电子设备及存储介质.pdf

是你****噩呀

1/10

2/10

3/10
4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人的控制方法、装置、电子设备及存储介质.pdf
本发明公开了一种机器人的控制方法、装置、电子设备及存储介质,属于机器人领域。该方法包括:构建机器人的状态转移模型,其中,状态转移模型为运动状态与控制量之间的关系;接收机器人的当前运动状态的当前状态参数;根据当前状态参数和状态转移模型对机器人在目标时间窗口内所有控制周期的运动状态进行预测,得到预测结果序列,其中,预测结果序列包括多个预测运动状态,每个预测运动状态对应一个控制周期;采用预测结果序列计算当前时间窗口的当前代价函数;采用当前代价函数和预设约束条件预测目标时间窗口内的目标控制量;在目标时间窗口采用目

机器人控制的方法、装置、电子设备及可读存储介质.pdf
本申请属于机器人技术领域,公开了机器人控制的方法、装置、电子设备及可读存储介质,该方法包括,确定机器人处于电梯内时,采集电梯内的电梯内图像;对电梯内图像进行按键识别,获得目标楼层按键的按键状态以及按键位置;若确定按键状态表征未按下,则基于按键位置,驱动机械臂针对目标楼层按键执行按键操作;若确定按键状态表征已按下,则对电梯内图像进行电梯楼层识别以及电梯门状态识别,获得楼层识别结果和电梯门状态;若确定楼层识别结果表征到达目的楼层,且电梯门状态表征开启状态,则执行出电梯操作。这样,在机器人乘坐电梯时,简化了控制
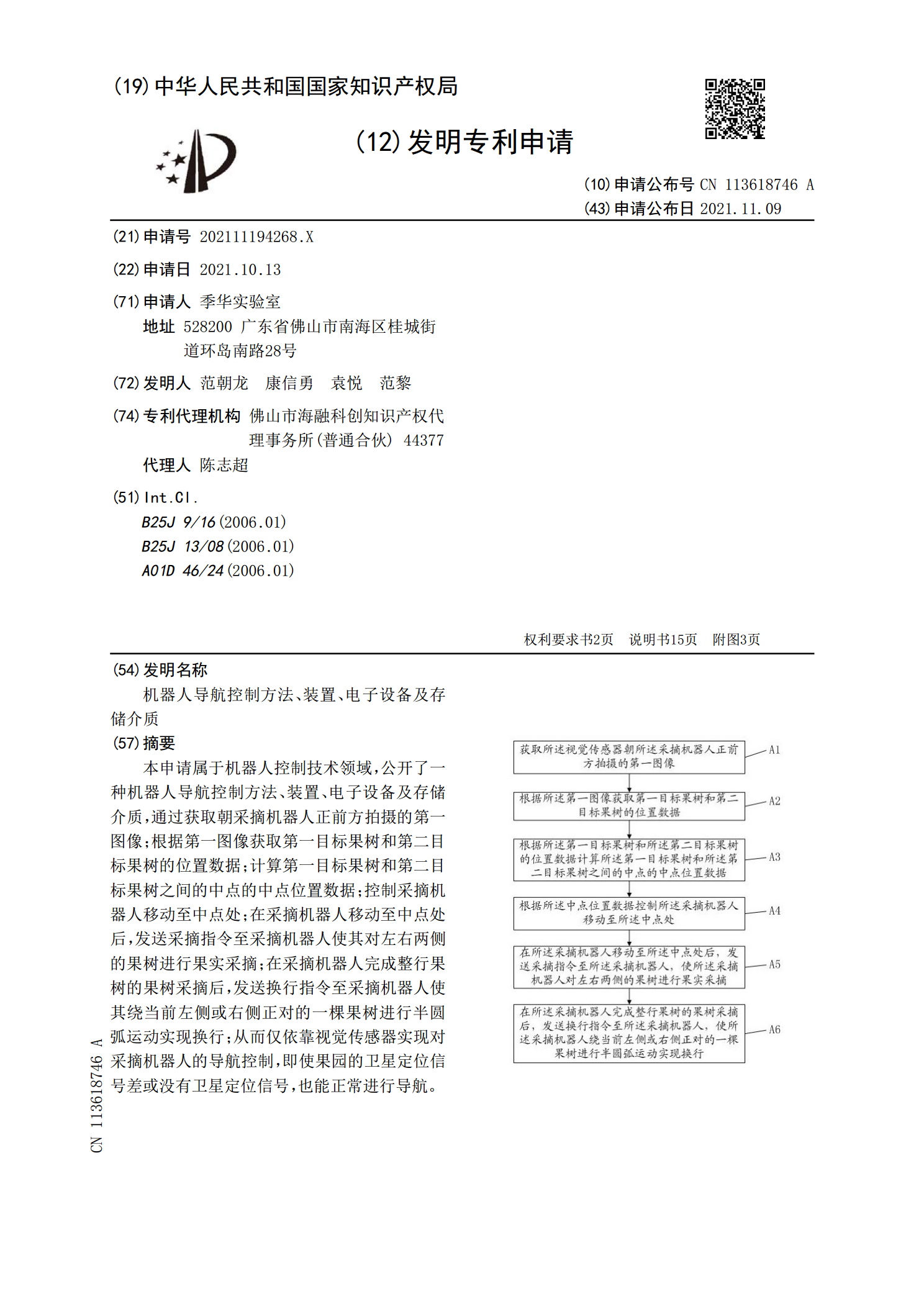
机器人导航控制方法、装置、电子设备及存储介质.pdf
本申请属于机器人控制技术领域,公开了一种机器人导航控制方法、装置、电子设备及存储介质,通过获取朝采摘机器人正前方拍摄的第一图像;根据第一图像获取第一目标果树和第二目标果树的位置数据;计算第一目标果树和第二目标果树之间的中点的中点位置数据;控制采摘机器人移动至中点处;在采摘机器人移动至中点处后,发送采摘指令至采摘机器人使其对左右两侧的果树进行果实采摘;在采摘机器人完成整行果树的果树采摘后,发送换行指令至采摘机器人使其绕当前左侧或右侧正对的一棵果树进行半圆弧运动实现换行;从而仅依靠视觉传感器实现对采摘机器人的
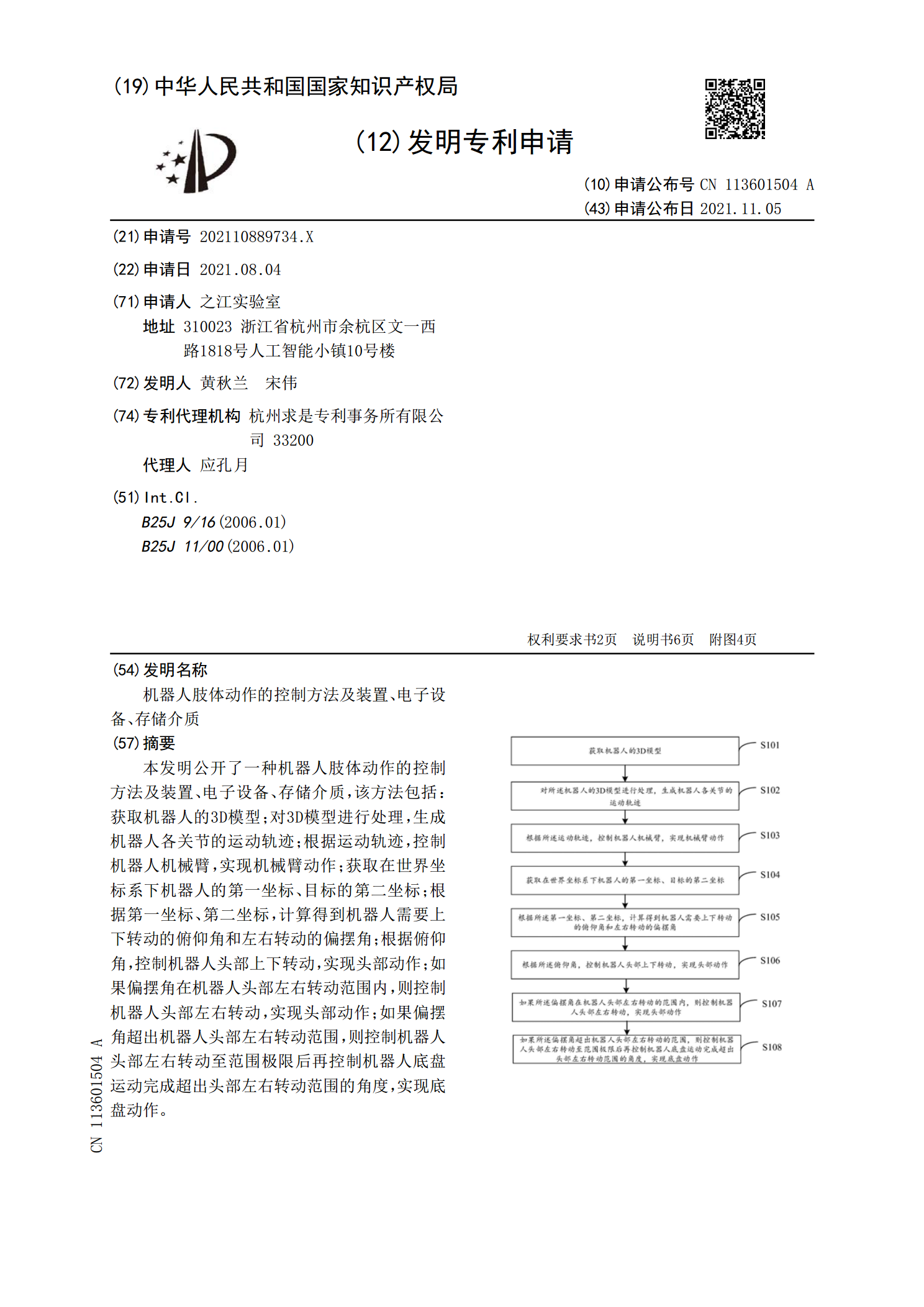
机器人肢体动作的控制方法及装置、电子设备、存储介质.pdf
本发明公开了一种机器人肢体动作的控制方法及装置、电子设备、存储介质,该方法包括:获取机器人的3D模型;对3D模型进行处理,生成机器人各关节的运动轨迹;根据运动轨迹,控制机器人机械臂,实现机械臂动作;获取在世界坐标系下机器人的第一坐标、目标的第二坐标;根据第一坐标、第二坐标,计算得到机器人需要上下转动的俯仰角和左右转动的偏摆角;根据俯仰角,控制机器人头部上下转动,实现头部动作;如果偏摆角在机器人头部左右转动范围内,则控制机器人头部左右转动,实现头部动作;如果偏摆角超出机器人头部左右转动范围,则控制机器人头部
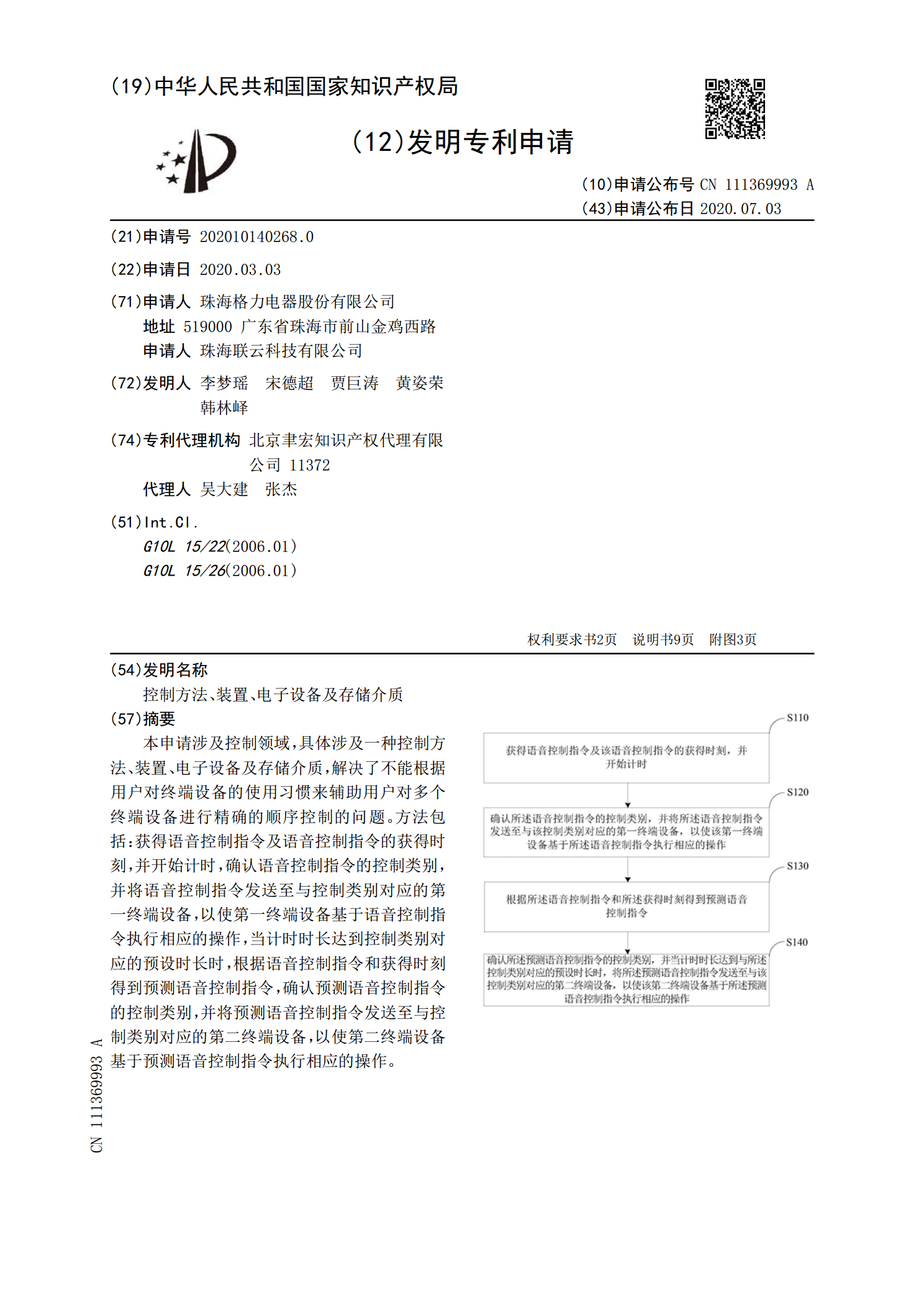
控制方法、装置、电子设备及存储介质.pdf
本申请涉及控制领域,具体涉及一种控制方法、装置、电子设备及存储介质,解决了不能根据用户对终端设备的使用习惯来辅助用户对多个终端设备进行精确的顺序控制的问题。方法包括:获得语音控制指令及语音控制指令的获得时刻,并开始计时,确认语音控制指令的控制类别,并将语音控制指令发送至与控制类别对应的第一终端设备,以使第一终端设备基于语音控制指令执行相应的操作,当计时时长达到控制类别对应的预设时长时,根据语音控制指令和获得时刻得到预测语音控制指令,确认预测语音控制指令的控制类别,并将预测语音控制指令发送至与控制类别对应的