
机器人控制的方法、装置、电子设备及可读存储介质.pdf

戊午****jj


1/10
2/10

3/10
4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

机器人控制的方法、装置、电子设备及可读存储介质.pdf
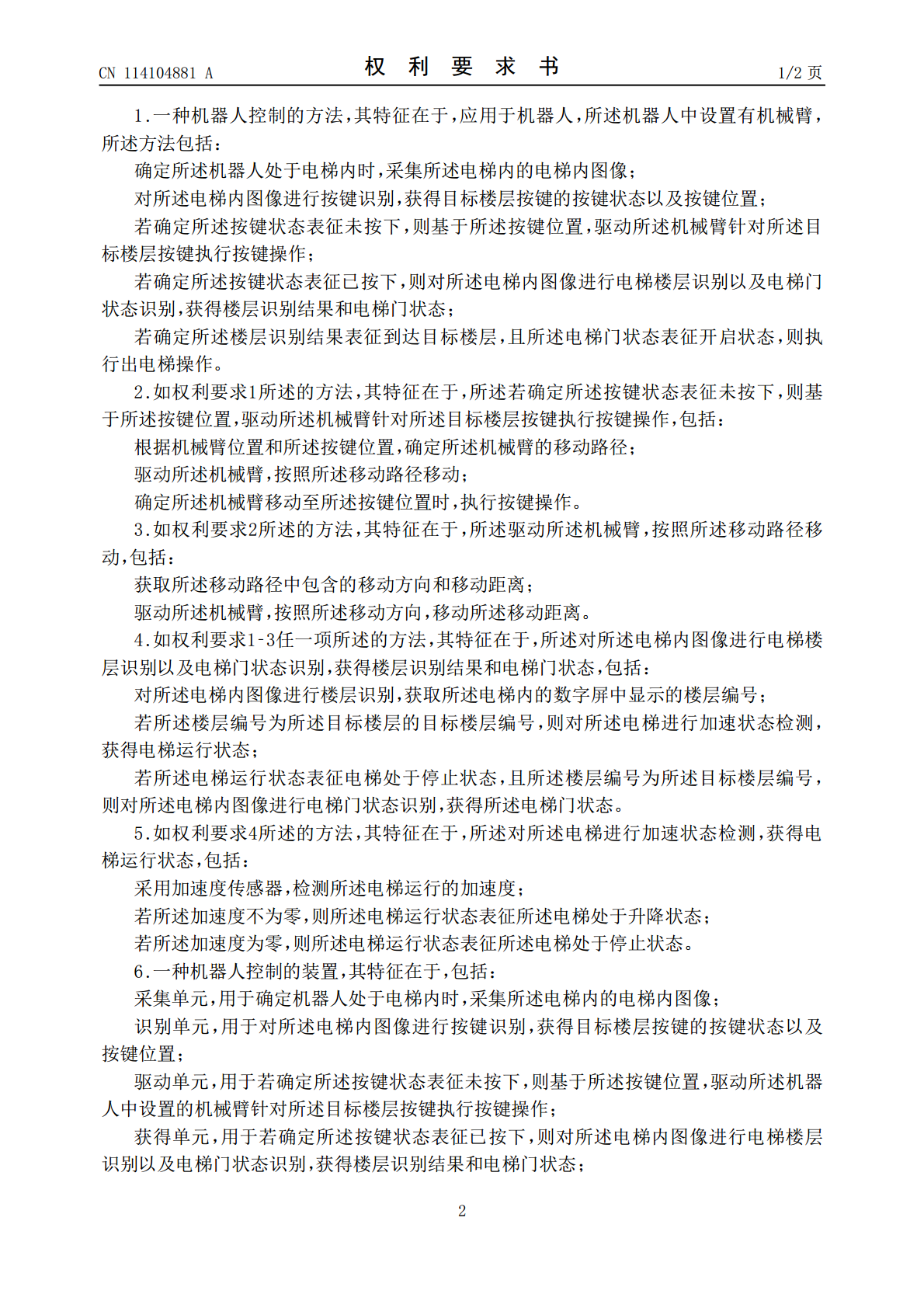
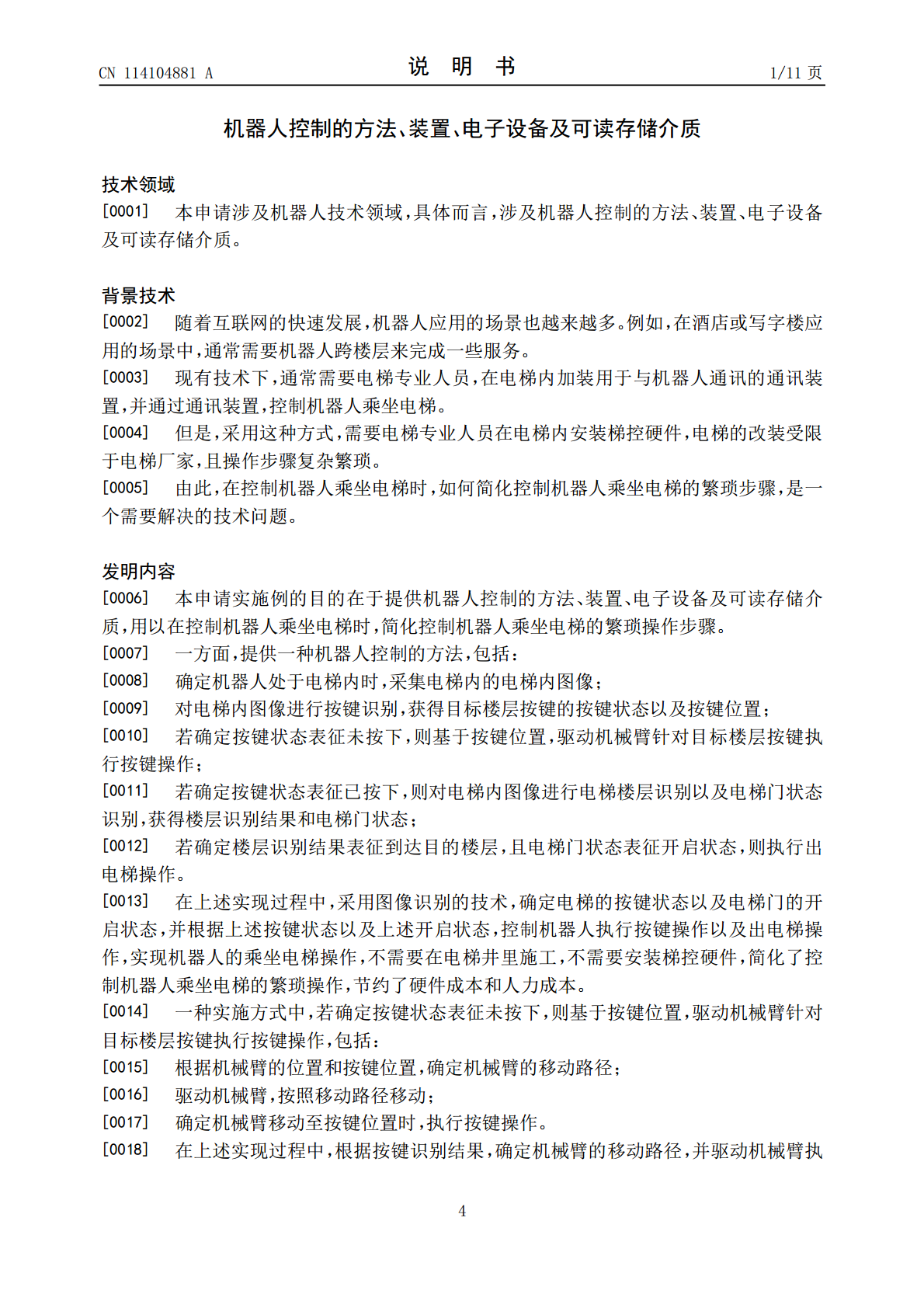
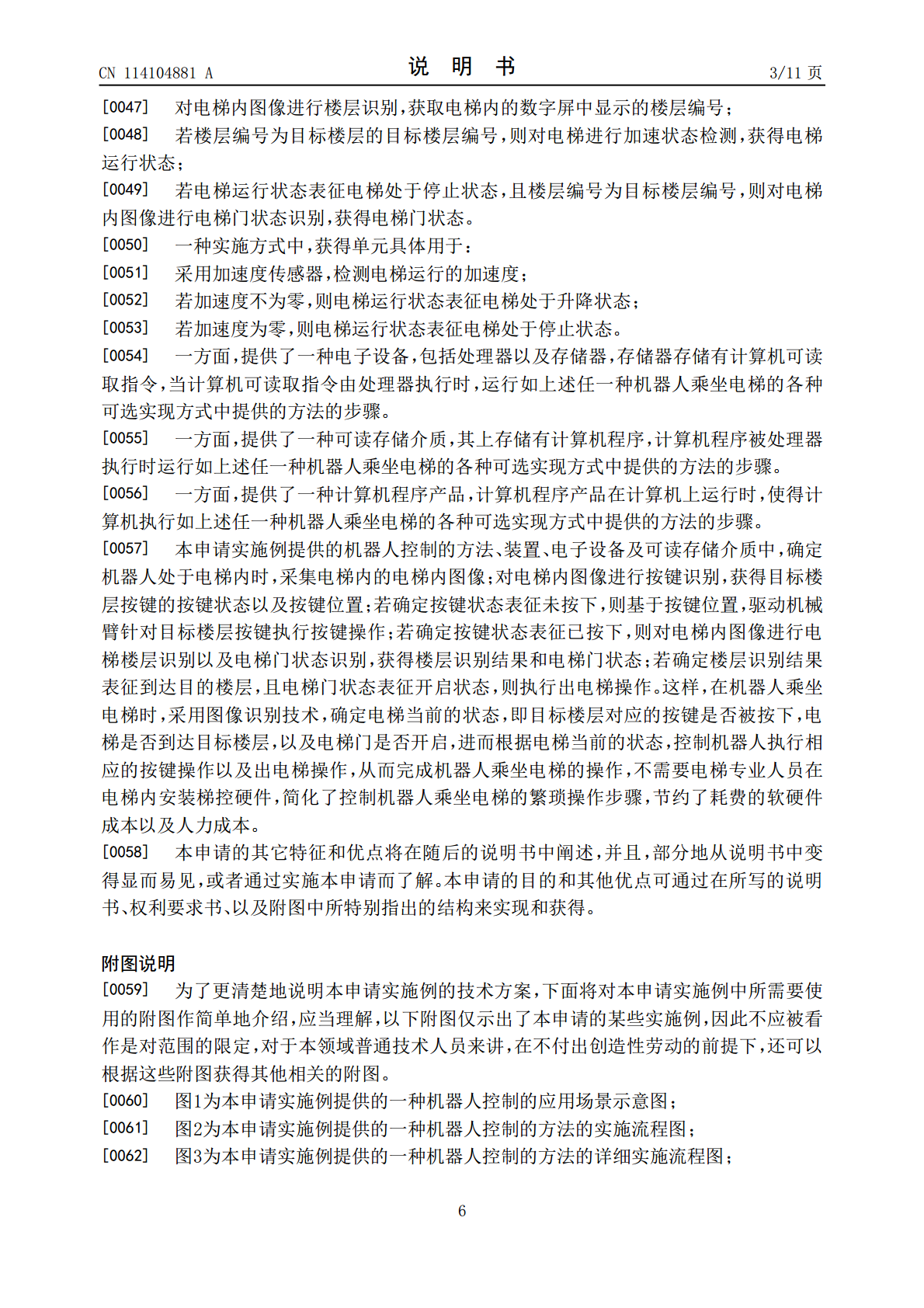
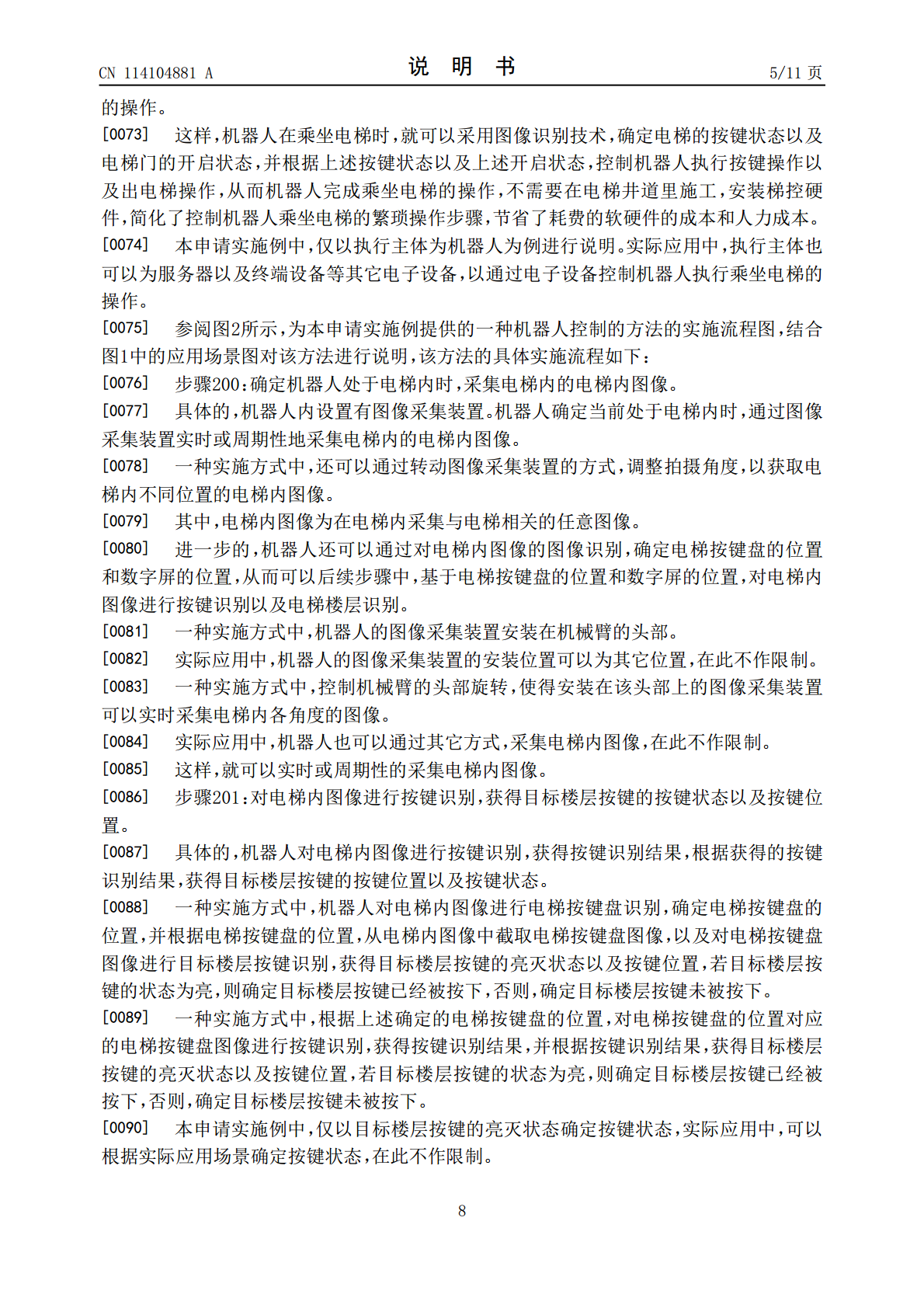
本申请属于机器人技术领域,公开了机器人控制的方法、装置、电子设备及可读存储介质,该方法包括,确定机器人处于电梯内时,采集电梯内的电梯内图像;对电梯内图像进行按键识别,获得目标楼层按键的按键状态以及按键位置;若确定按键状态表征未按下,则基于按键位置,驱动机械臂针对目标楼层按键执行按键操作;若确定按键状态表征已按下,则对电梯内图像进行电梯楼层识别以及电梯门状态识别,获得楼层识别结果和电梯门状态;若确定楼层识别结果表征到达目的楼层,且电梯门状态表征开启状态,则执行出电梯操作。这样,在机器人乘坐电梯时,简化了控制
电子设备、控制方法、控制装置及可读存储介质.pdf
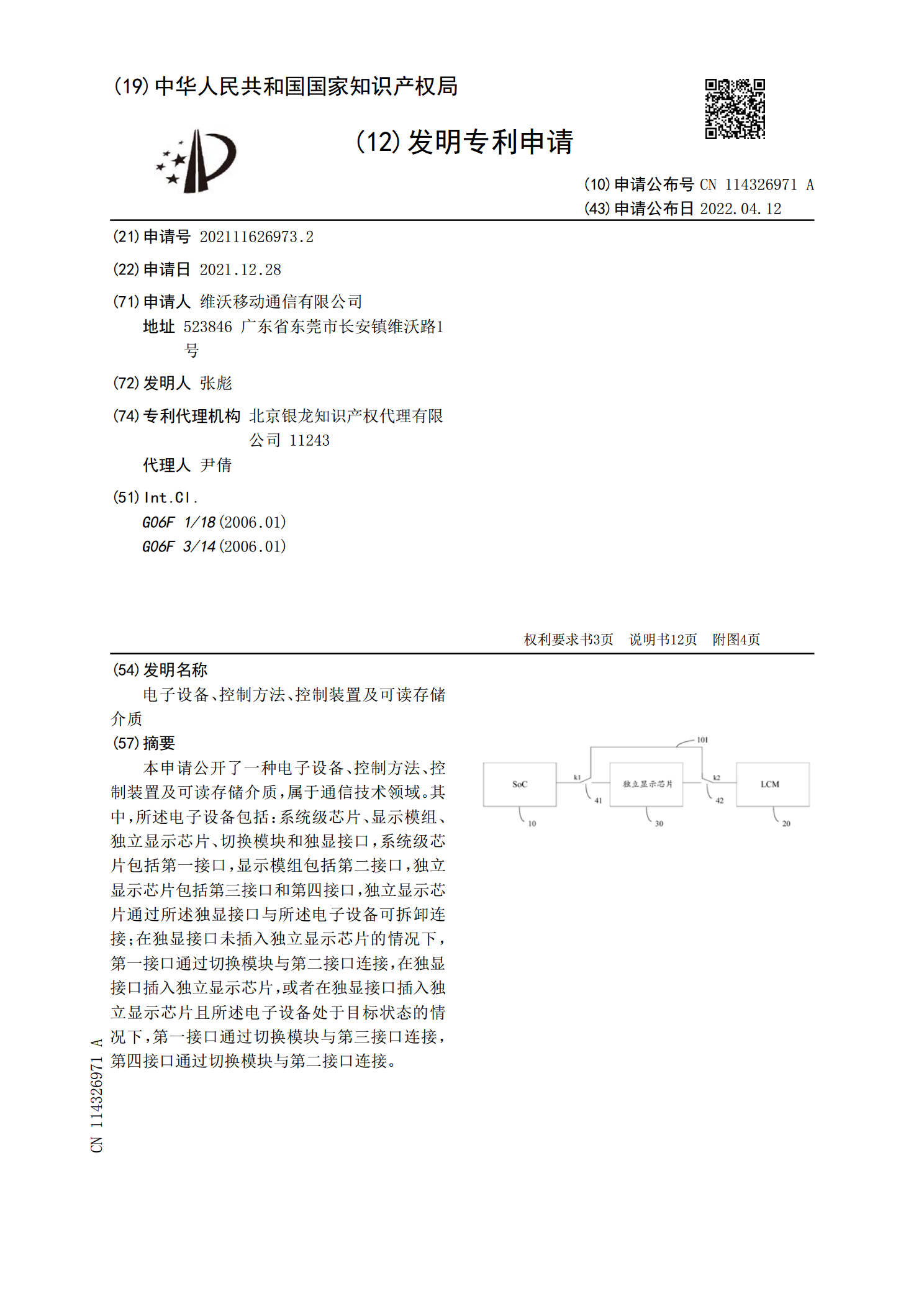
本申请公开了一种电子设备、控制方法、控制装置及可读存储介质,属于通信技术领域。其中,所述电子设备包括:系统级芯片、显示模组、独立显示芯片、切换模块和独显接口,系统级芯片包括第一接口,显示模组包括第二接口,独立显示芯片包括第三接口和第四接口,独立显示芯片通过所述独显接口与所述电子设备可拆卸连接;在独显接口未插入独立显示芯片的情况下,第一接口通过切换模块与第二接口连接,在独显接口插入独立显示芯片,或者在独显接口插入独立显示芯片且所述电子设备处于目标状态的情况下,第一接口通过切换模块与第三接口连接,第四接口通过
设备控制方法、装置、电子设备及可读存储介质.pdf
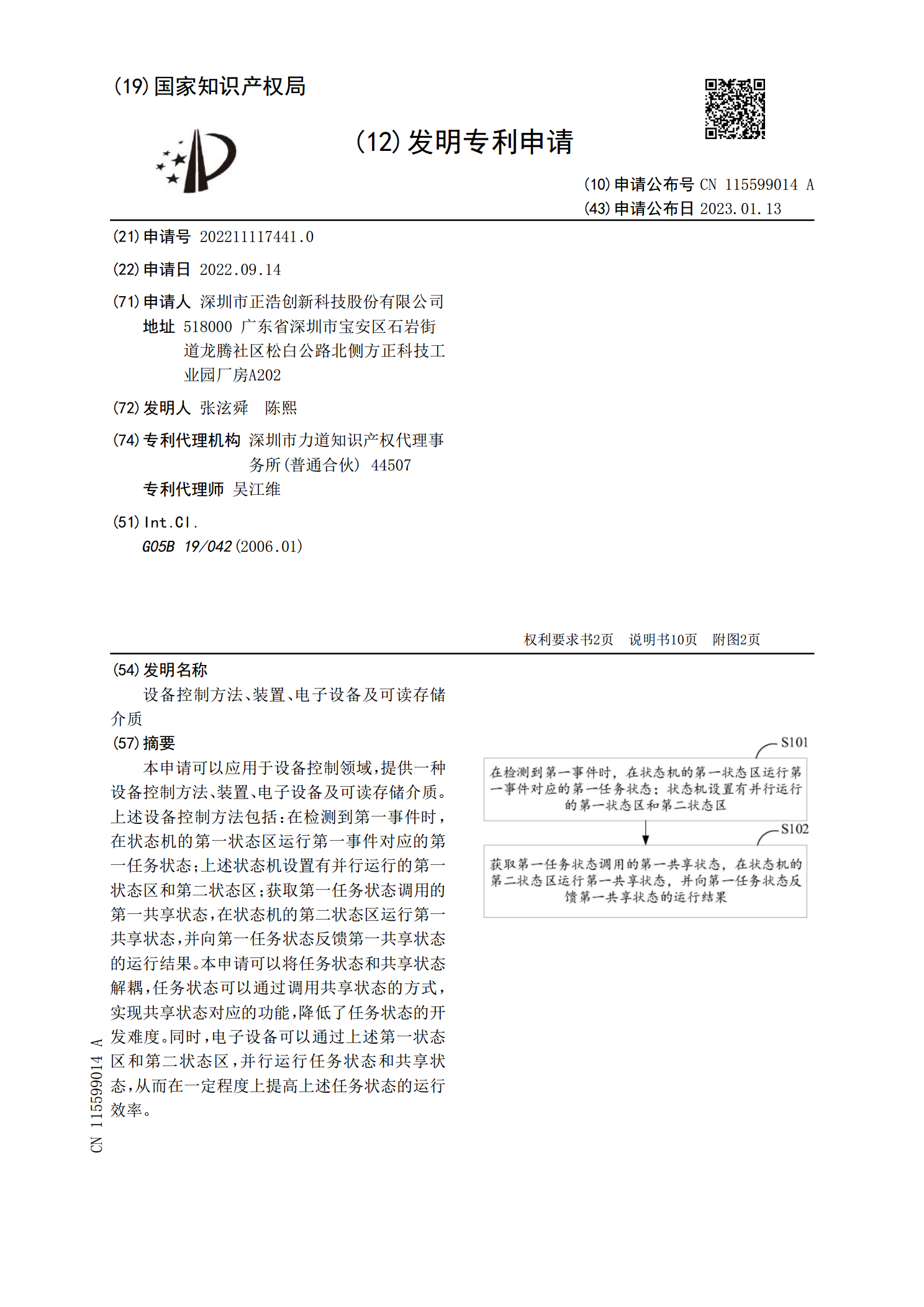
本申请可以应用于设备控制领域,提供一种设备控制方法、装置、电子设备及可读存储介质。上述设备控制方法包括:在检测到第一事件时,在状态机的第一状态区运行第一事件对应的第一任务状态;上述状态机设置有并行运行的第一状态区和第二状态区;获取第一任务状态调用的第一共享状态,在状态机的第二状态区运行第一共享状态,并向第一任务状态反馈第一共享状态的运行结果。本申请可以将任务状态和共享状态解耦,任务状态可以通过调用共享状态的方式,实现共享状态对应的功能,降低了任务状态的开发难度。同时,电子设备可以通过上述第一状态区和第二状

显示控制方法、装置、电子设备及可读存储介质.pdf
本申请公开了一种显示控制方法、装置、电子设备及可读存储介质,属于通信技术领域。该方法包括:在显示有N个分屏界面的情况下,接收用户针对第一分屏界面的第一输入,第一分屏界面为所述N个分屏界面中的一个,N为大于1的整数;响应于第一输入,对第一分屏界面与第二分屏界面执行第一输入对应的第一操作,第二分屏界面为N个分屏界面中与第一分屏界面存在关联关系的分屏界面。
功耗控制方法、装置、电子设备及可读存储介质.pdf
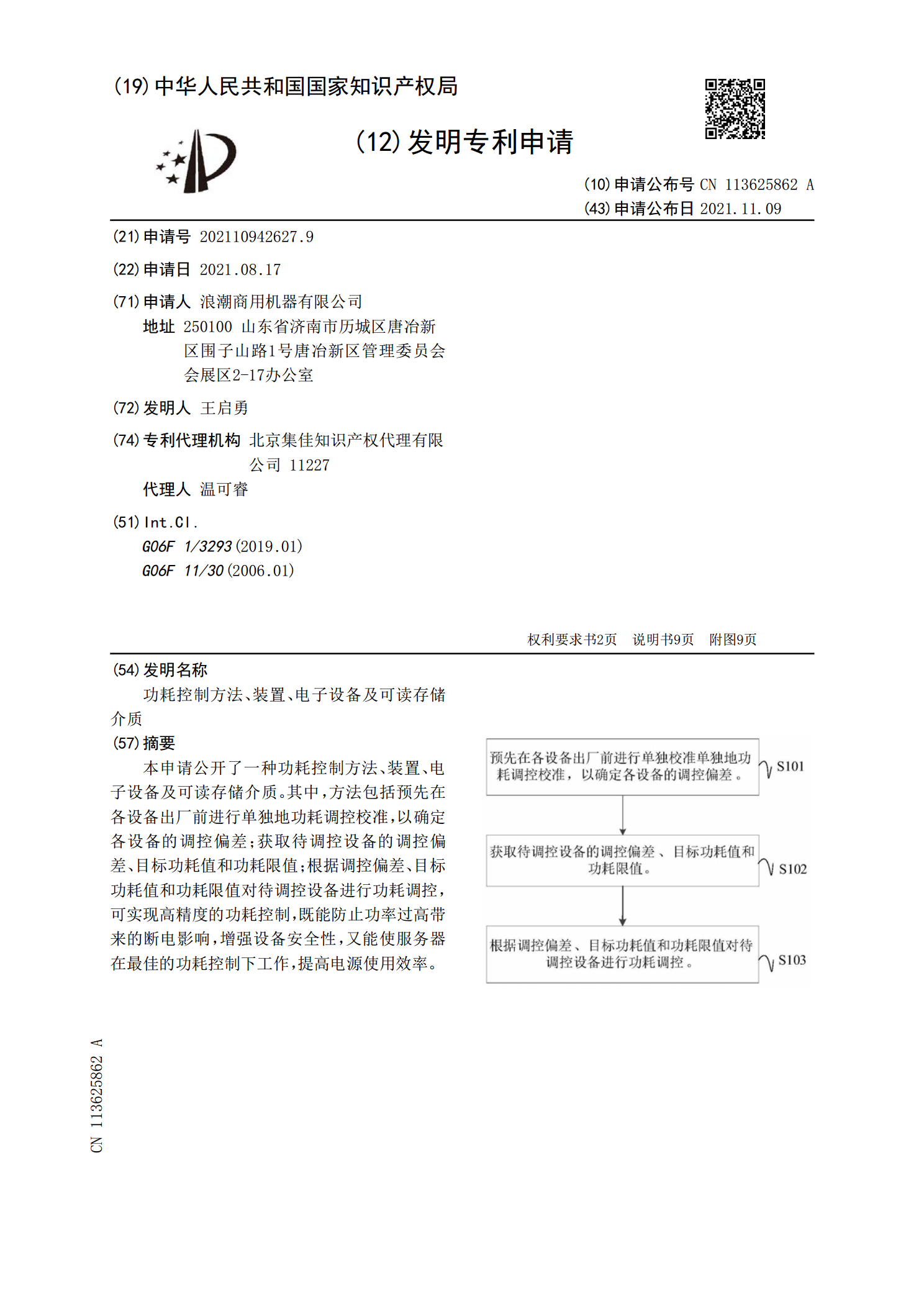
本申请公开了一种功耗控制方法、装置、电子设备及可读存储介质。其中,方法包括预先在各设备出厂前进行单独地功耗调控校准,以确定各设备的调控偏差;获取待调控设备的调控偏差、目标功耗值和功耗限值;根据调控偏差、目标功耗值和功耗限值对待调控设备进行功耗调控,可实现高精度的功耗控制,既能防止功率过高带来的断电影响,增强设备安全性,又能使服务器在最佳的功耗控制下工作,提高电源使用效率。