
一种运动灵活的欠驱动球形水下机器人.pdf

星星****眨眼

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种运动灵活的欠驱动球形水下机器人.pdf
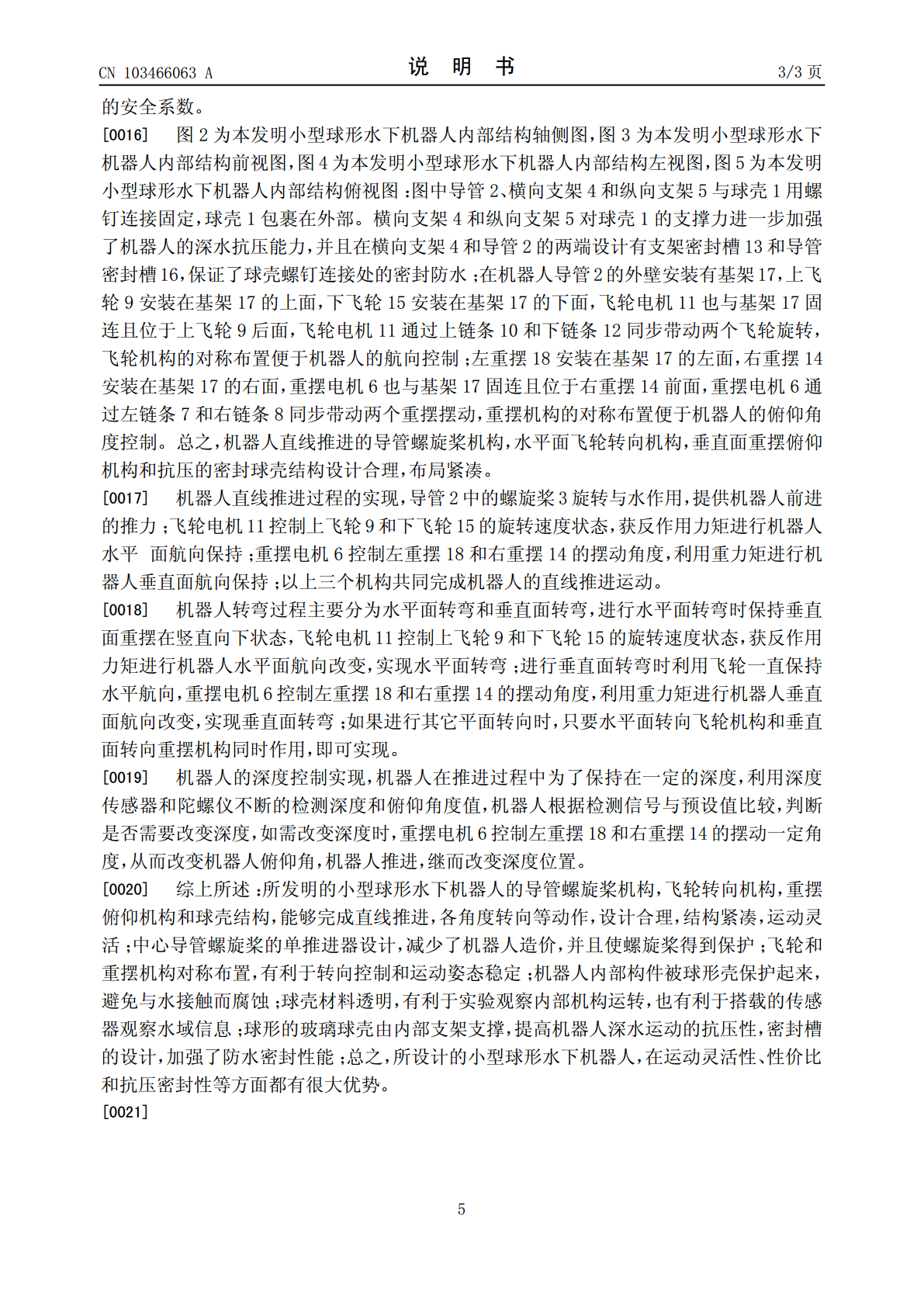
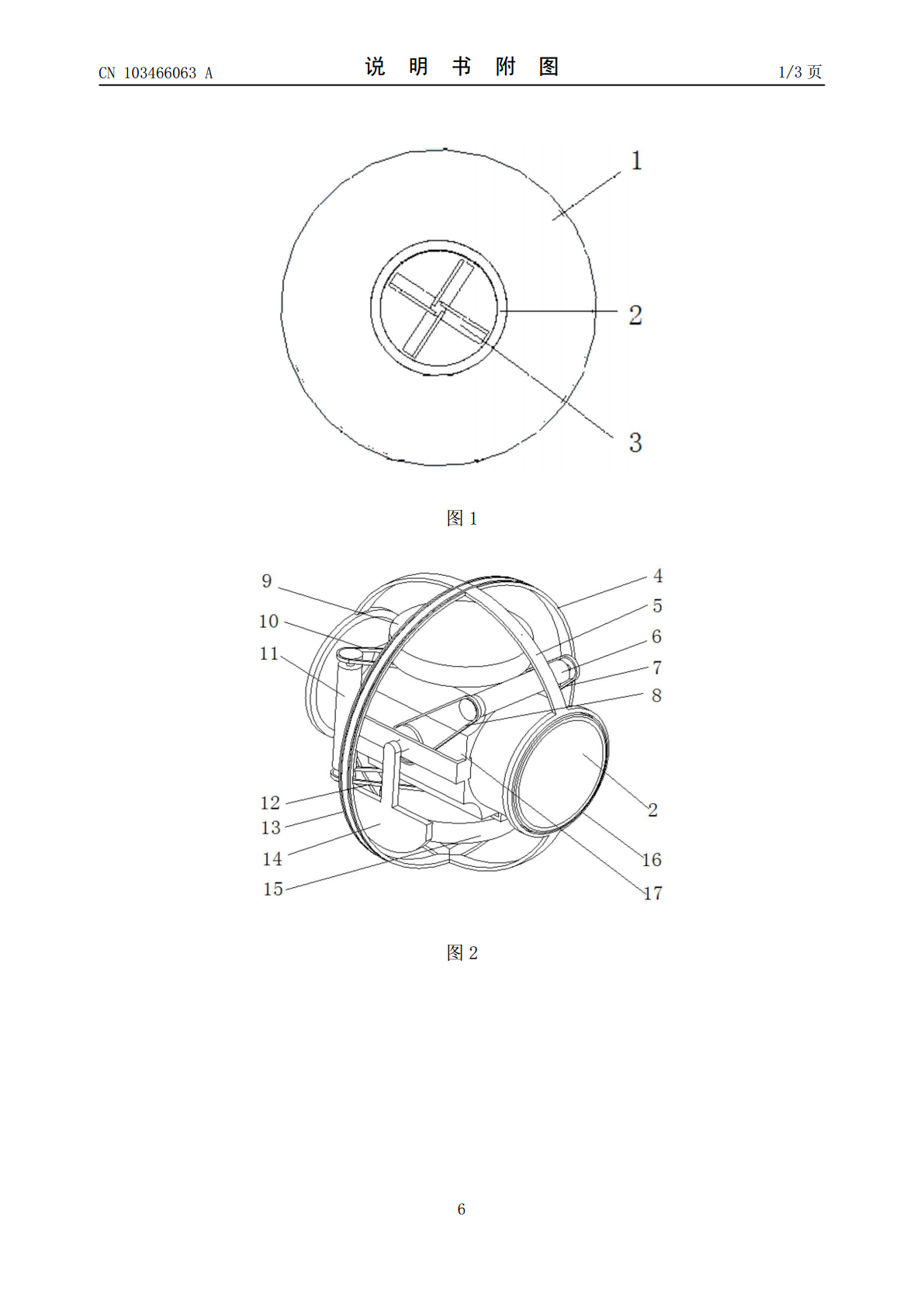
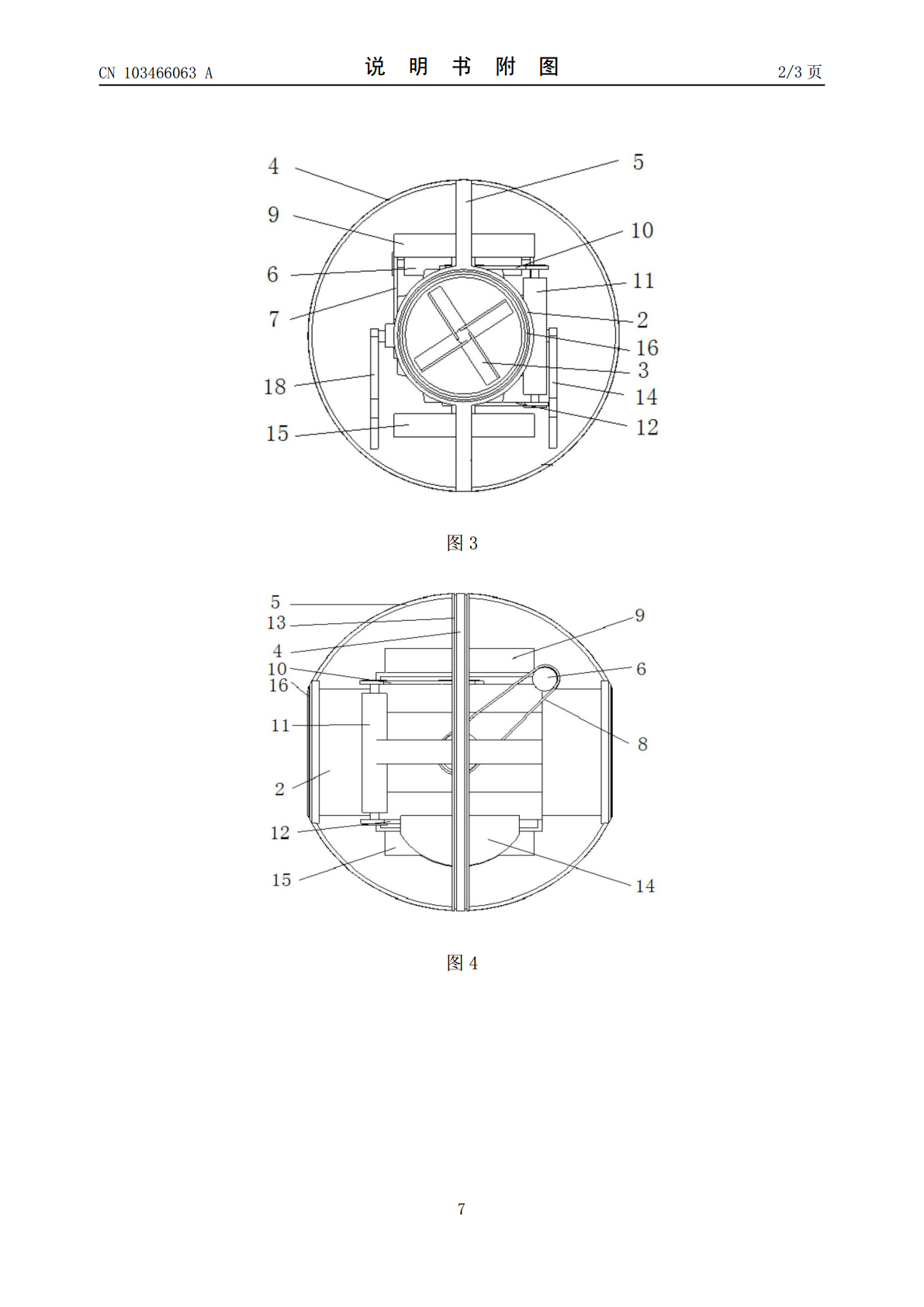
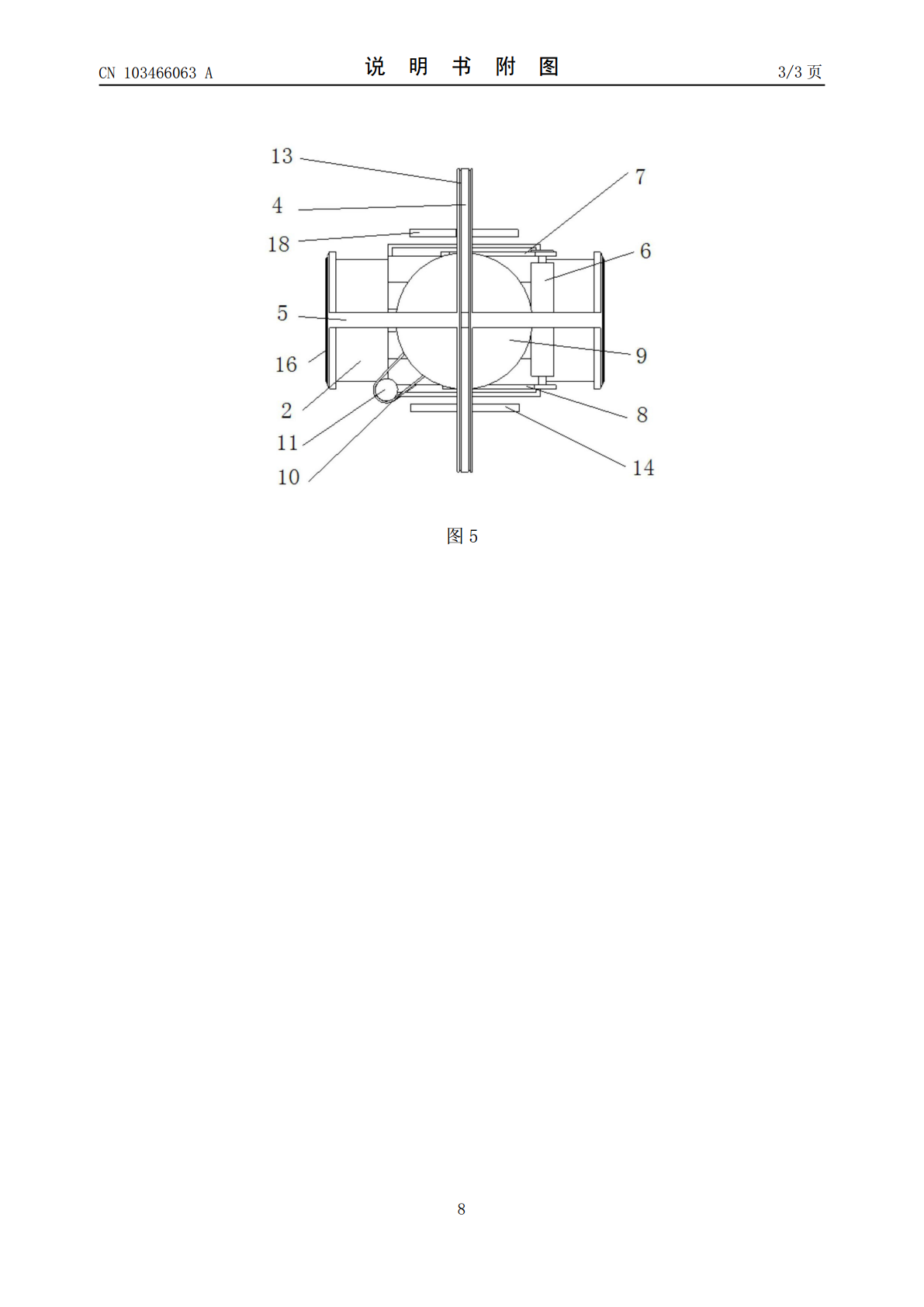
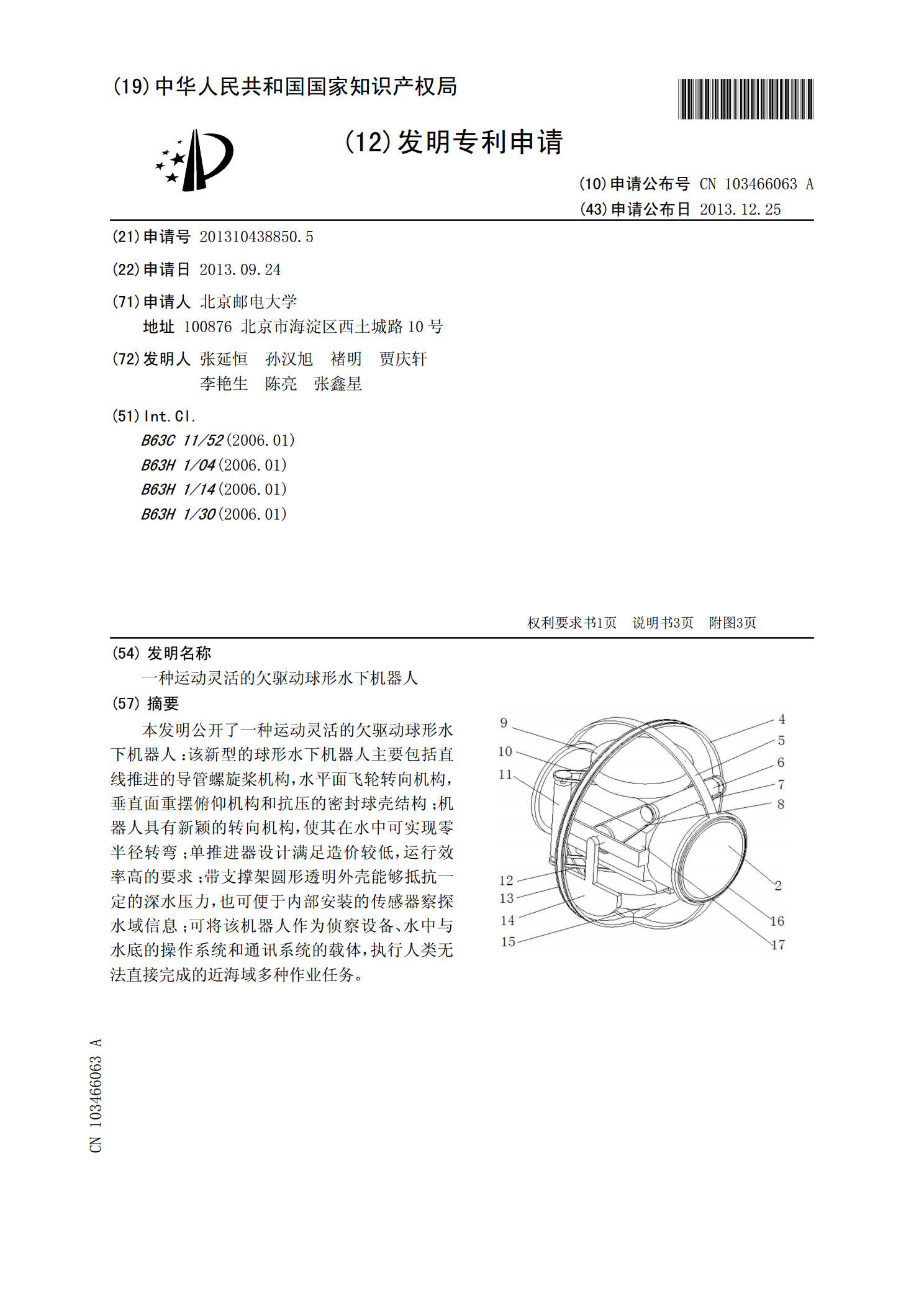
本发明公开了一种运动灵活的欠驱动球形水下机器人:该新型的球形水下机器人主要包括直线推进的导管螺旋桨机构,水平面飞轮转向机构,垂直面重摆俯仰机构和抗压的密封球壳结构;机器人具有新颖的转向机构,使其在水中可实现零半径转弯;单推进器设计满足造价较低,运行效率高的要求;带支撑架圆形透明外壳能够抵抗一定的深水压力,也可便于内部安装的传感器察探水域信息;可将该机器人作为侦察设备、水中与水底的操作系统和通讯系统的载体,执行人类无法直接完成的近海域多种作业任务。

欠驱动球形机器人纵向运动控制方法研究.pptx
汇报人:目录PARTONEPARTTWO欠驱动球形机器人的研究背景纵向运动控制的重要性研究目的和意义PARTTHREE球形机器人的特点与优势欠驱动球形机器人的工作原理国内外研究现状及发展趋势PARTFOUR纵向运动控制策略控制算法设计与实现实验验证与结果分析PARTFIVE控制方法的局限性分析控制方法的优化方案优化后实验验证与结果分析PARTSIX欠驱动球形机器人在实际应用中的优势未来研究方向与展望对相关领域的影响与贡献PARTSEVEN研究成果总结对研究工作的自我评价与反思对未来研究的建议与展望THAN

欠驱动球形机器人纵向运动控制方法研究的任务书.docx
欠驱动球形机器人纵向运动控制方法研究的任务书任务书项目名称:欠驱动球形机器人纵向运动控制方法研究任务目的:本项目旨在研究欠驱动球形机器人纵向运动控制的方法,探究其动力学特性,设计相应的控制算法,提高球形机器人的运动控制精度和稳定性,为球形机器人的应用和推广提供技术支持。任务内容:1.球形机器人的动力学模型建立和分析根据球形机器人的机构结构和运动特点,建立其动力学模型和运动学模型,深入分析球形机器人的运动学性质和动力学特点,为后续控制算法的设计提供基础。2.欠驱动球形机器人的纵向运动控制算法设计研究欠驱动球

基于球形空间的欠驱动机器人手腕机构.pdf
本发明涉及一种基于球形空间的欠驱动机器人手腕机构。它包括,一个执行连接体和一个臂架,所述执行连接体有一个球形空腔,在该球形空腔中心处有上下两片可调圆板通过螺栓与臂架固定连接;三个动力架可根据需要固定在可调圆板中不同的螺栓孔中,该三个动力架中的两个动力架端部各装有一个动力源,动力源经一个牙嵌式离合器连接一根滚轮轴,滚轮轴上各装一个滚轮,该滚轮与执行连接体球形空腔的内壁滚动接触;另一个动力架端部直接装有一个滚轮且与执行连接体球形空腔的内壁滚动接触。因为本基于球形空间的欠驱动机器人手腕机构的滚轮和执行连接体是纯
一种水下球形机器人.pdf
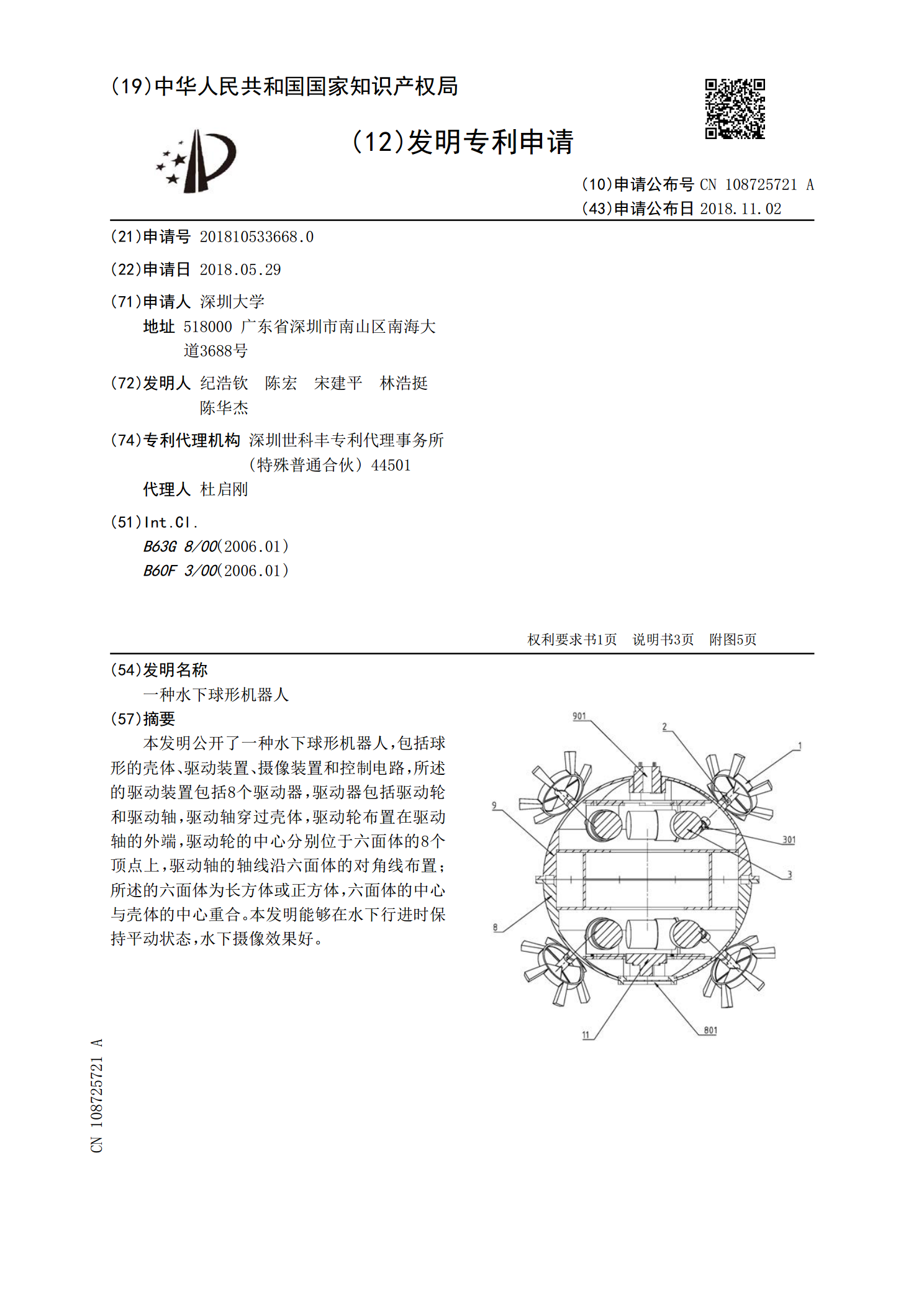
本发明公开了一种水下球形机器人,包括球形的壳体、驱动装置、摄像装置和控制电路,所述的驱动装置包括8个驱动器,驱动器包括驱动轮和驱动轴,驱动轴穿过壳体,驱动轮布置在驱动轴的外端,驱动轮的中心分别位于六面体的8个顶点上,驱动轴的轴线沿六面体的对角线布置;所述的六面体为长方体或正方体,六面体的中心与壳体的中心重合。本发明能够在水下行进时保持平动状态,水下摄像效果好。