
欠驱动球形机器人纵向运动控制方法研究.pptx

快乐****蜜蜂

1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

欠驱动球形机器人纵向运动控制方法研究.pptx
汇报人:目录PARTONEPARTTWO欠驱动球形机器人的研究背景纵向运动控制的重要性研究目的和意义PARTTHREE球形机器人的特点与优势欠驱动球形机器人的工作原理国内外研究现状及发展趋势PARTFOUR纵向运动控制策略控制算法设计与实现实验验证与结果分析PARTFIVE控制方法的局限性分析控制方法的优化方案优化后实验验证与结果分析PARTSIX欠驱动球形机器人在实际应用中的优势未来研究方向与展望对相关领域的影响与贡献PARTSEVEN研究成果总结对研究工作的自我评价与反思对未来研究的建议与展望THAN

水平运动的欠驱动机器人运动规划与控制研究.docx
水平运动的欠驱动机器人运动规划与控制研究水平运动的欠驱动机器人运动规划与控制研究摘要:随着科技的不断进步,机器人技术得到了广泛的应用和发展。水平运动的欠驱动机器人具有简化机构、高效能耗和机动性强的特点,被广泛应用于工业自动化、医疗护理、救援和个人服务等领域。本文通过研究水平运动的欠驱动机器人的运动规划和控制技术,旨在提高机器人的运动效率和控制精度。关键词:机器人;欠驱动;运动规划;控制;效率一、引言水平运动的欠驱动机器人是一种具有自由度少于它的机构自由度个数(例如,只有三个自由度的机构),是一种典型的细分
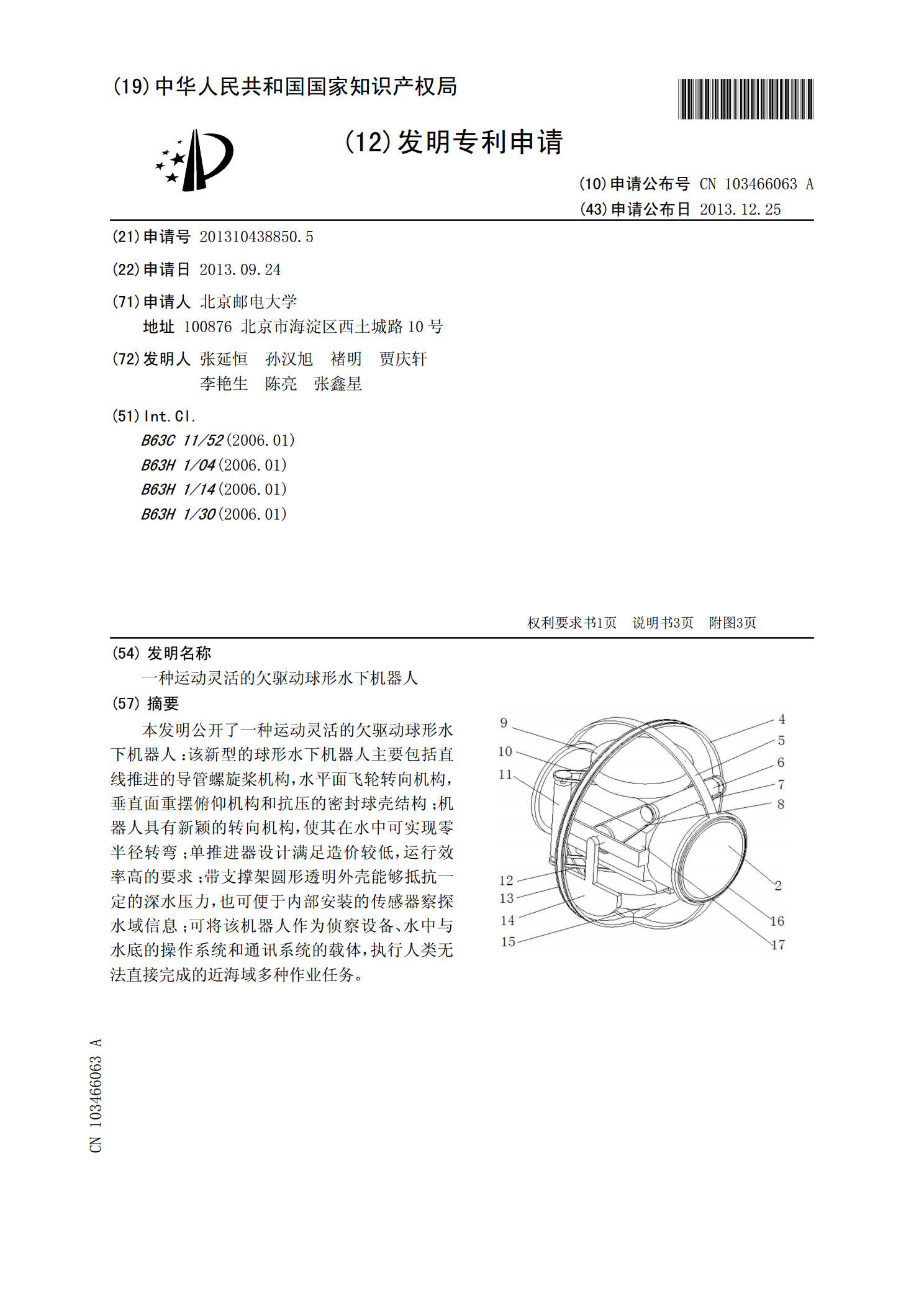
一种运动灵活的欠驱动球形水下机器人.pdf
本发明公开了一种运动灵活的欠驱动球形水下机器人:该新型的球形水下机器人主要包括直线推进的导管螺旋桨机构,水平面飞轮转向机构,垂直面重摆俯仰机构和抗压的密封球壳结构;机器人具有新颖的转向机构,使其在水中可实现零半径转弯;单推进器设计满足造价较低,运行效率高的要求;带支撑架圆形透明外壳能够抵抗一定的深水压力,也可便于内部安装的传感器察探水域信息;可将该机器人作为侦察设备、水中与水底的操作系统和通讯系统的载体,执行人类无法直接完成的近海域多种作业任务。

欠驱动无人船运动控制方法研究的开题报告.docx
欠驱动无人船运动控制方法研究的开题报告开题报告论文题目:欠驱动无人船运动控制方法研究一、选题背景无人船作为一种新型的海洋探测技术,受到众多研究者的关注。目前,许多国内外研究机构已经开始研究无人船的自主控制技术。在无人船的运动控制中,动力装置和控制算法是关键的两个方面,而欠驱动无人船在动力装置上具有一定的优势。欠驱动动力装置减少了控制机构的数量和动力需求,降低了船体重量,提高了运动自由度。然而,欠驱动结构也带来了控制复杂性的挑战。因此,研究欠驱动无人船的运动控制方法具有重要的理论和应用意义。二、研究意义欠驱

水平运动的欠驱动机器人运动规划与控制研究的任务书.docx
水平运动的欠驱动机器人运动规划与控制研究的任务书一、任务背景欠驱动机器人是指机器人的自由度(DOF)小于任务所需的自由度,即其运动空间维数低于任务所需维度。这种机器人具有轻量化、高弹性、节省能量等优势,因此被广泛应用于现代制造业、医疗器械、航空航天等领域。水平运动的欠驱动机器人特指机器人在平面内的运动。这种机器人因其简单性和高效性而受到青睐,但也带来了许多挑战。比如,它们的任务空间具有高度非线性和复杂性,因此需要进行规划和控制才能实现良好的性能。本任务的背景是针对水平运动的欠驱动机器人进行运动规划和控制研