
一种气压驱动式双臂解魔方机器人.pdf

和裕****az


1/8

2/8

3/8

4/8
5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种气压驱动式双臂解魔方机器人.pdf
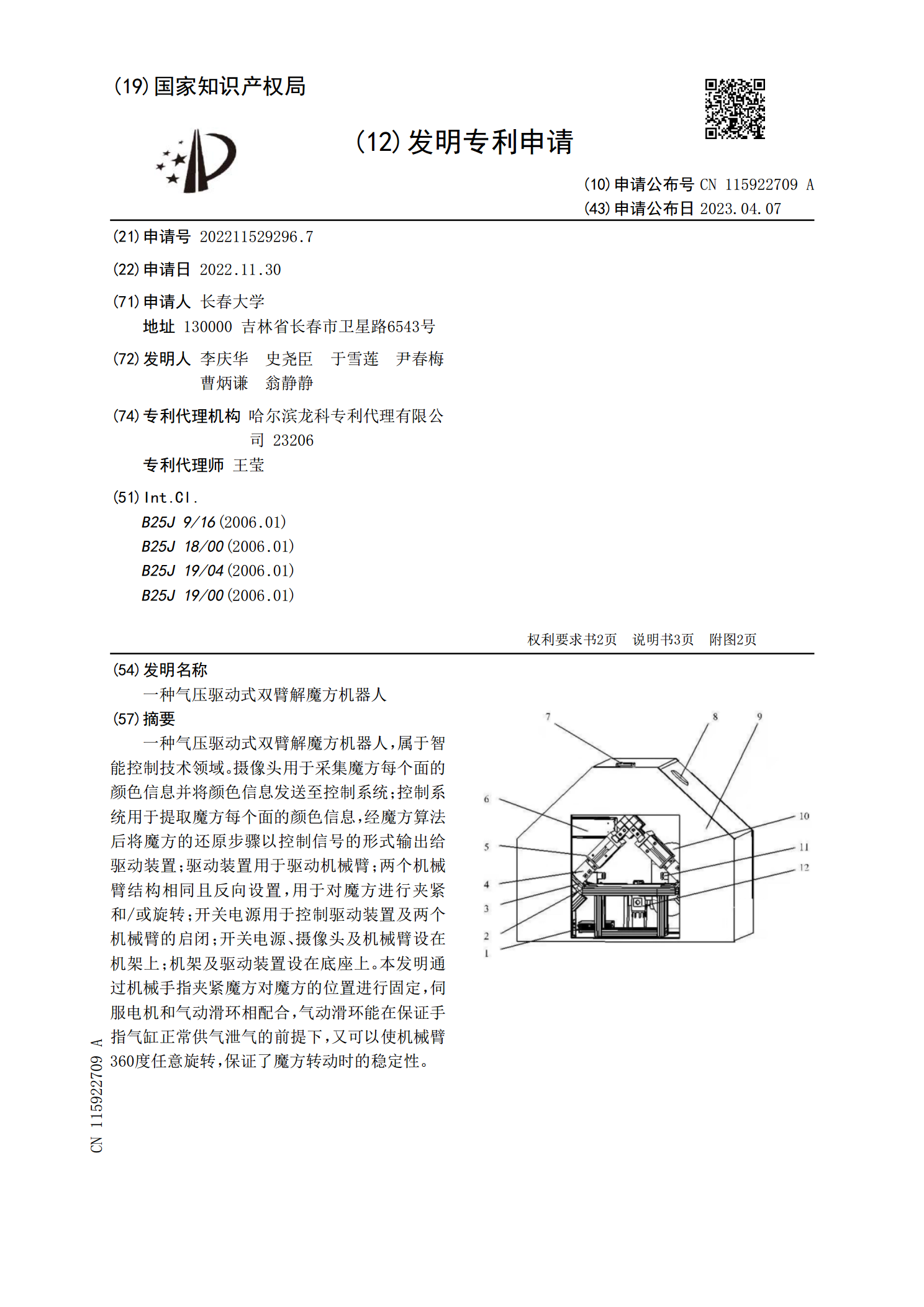
一种气压驱动式双臂解魔方机器人,属于智能控制技术领域。摄像头用于采集魔方每个面的颜色信息并将颜色信息发送至控制系统;控制系统用于提取魔方每个面的颜色信息,经魔方算法后将魔方的还原步骤以控制信号的形式输出给驱动装置;驱动装置用于驱动机械臂;两个机械臂结构相同且反向设置,用于对魔方进行夹紧和/或旋转;开关电源用于控制驱动装置及两个机械臂的启闭;开关电源、摄像头及机械臂设在机架上;机架及驱动装置设在底座上。本发明通过机械手指夹紧魔方对魔方的位置进行固定,伺服电机和气动滑环相配合,气动滑环能在保证手指气缸正常供气

双臂解魔方机器人及其使用方法.pdf
本发明公开了一种双臂解魔方机器人及其使用方法,双臂解魔方机器人包括第一机器臂、第二机器臂、控制箱、控制板、驱动控制机构、机器支架、摄像装置,控制板、驱动控制机构分别安装在控制箱内,所述摄像装置、机器支架分别安装在控制箱的顶面上,第一机器臂、第一机器臂分别安装在机器支架上,第一机器臂、第二机器臂的轴线相互垂直交汇形成魔方夹提位;摄像装置的摄像方向朝向魔方夹提位;第一机器臂、第一机器臂分别通过驱动控制机构与控制板电性连接,摄像装置与控制板电性连接。该双臂解魔方机器人无需改动魔方本体,同时降低了制造成本,降低了

单臂驱动双臂越障式巡线机器人.pdf
本发明公开了一种单臂驱动双臂越障式巡线机器人,包括机架(4)、越障前臂(3)、越障后臂(1)和驱动轮(2),所述越障前臂(3)位于机架(4)两侧,由前臂夹持机构(31)、前臂伸缩机构(34)和前臂整体旋转机构(36)组成;所述越障后臂(1)从机架(4)中部向外伸出,越障后臂(1)由后臂夹持机构(11)、后臂伸缩机构(14)和后臂整体旋转机构(15)组成;所述驱动轮(2)位于机架(4)中央正上方,通过轴承支座连接机架(4),驱动轮(2)由橡胶轮(21)、左右滚珠丝杆(22)和驱动装置(23)组成。本发明具有

一种机器人手臂驱动装置及双臂机器人.pdf
本发明公开了一种机器人手臂驱动装置,包括直线驱动组件、支架、高度可调安装板和关节座;支架具有多条支腿和连接支腿顶端的顶横梁;顶横梁上设置有第一铰支座;高度可调安装板上设置有第二铰支座;关节座的底部纵向设置有第一铰接轴,关节座铰接于第一铰支座上;关节座远离支架的一端设置有用于连接机器人手臂的手臂连接法兰,关节座靠近支架的一端设置有第三铰支座;直线驱动组件的活动端铰接第三铰支座,固定端铰接第二铰支座。本发明还公开了一种双臂机器人。本发明机器人手臂驱动装置可以实现机器人手臂的侧向摆动,使机器人手臂的关节体积缩小
一种轮腿式双臂机器人.pdf
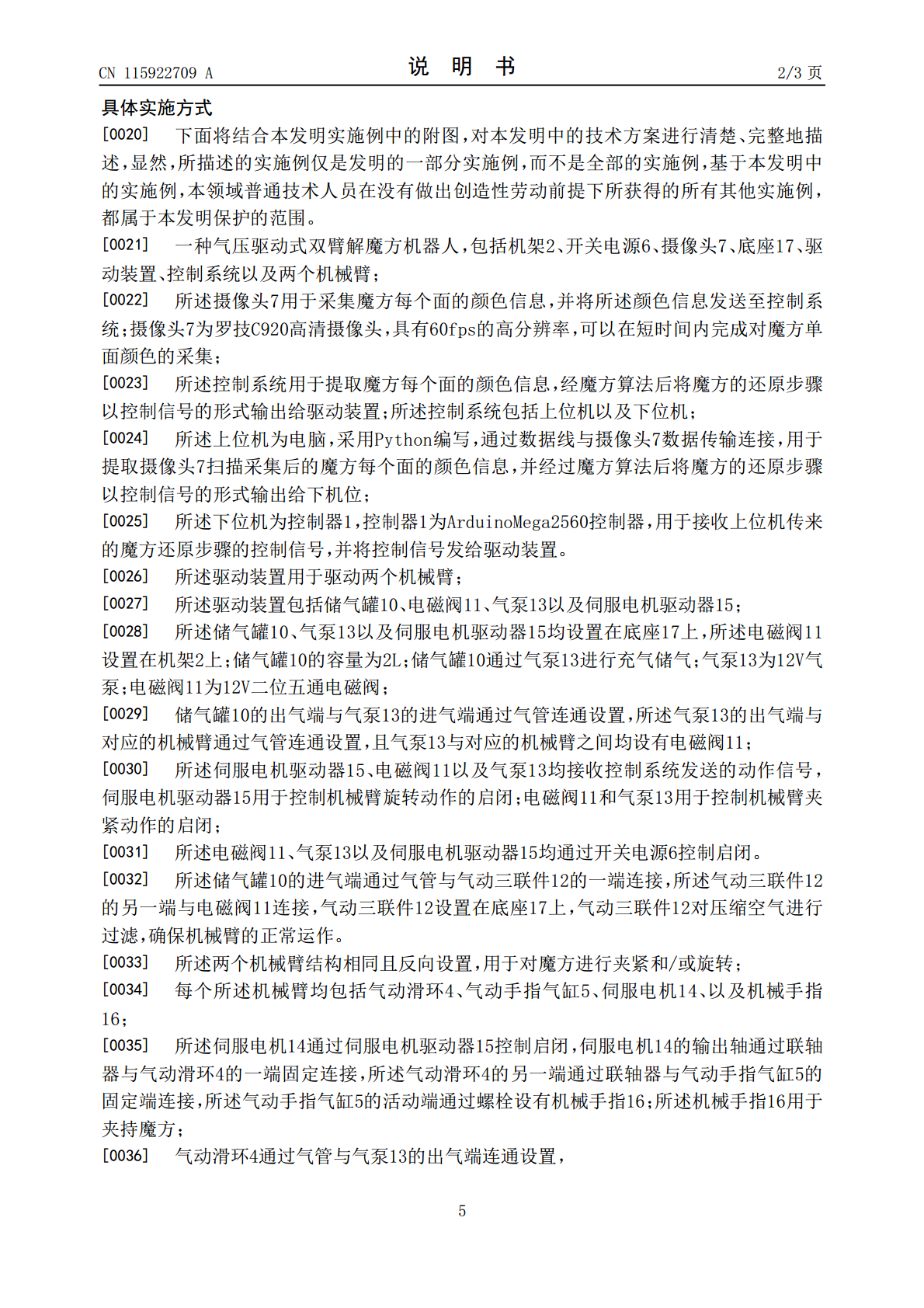
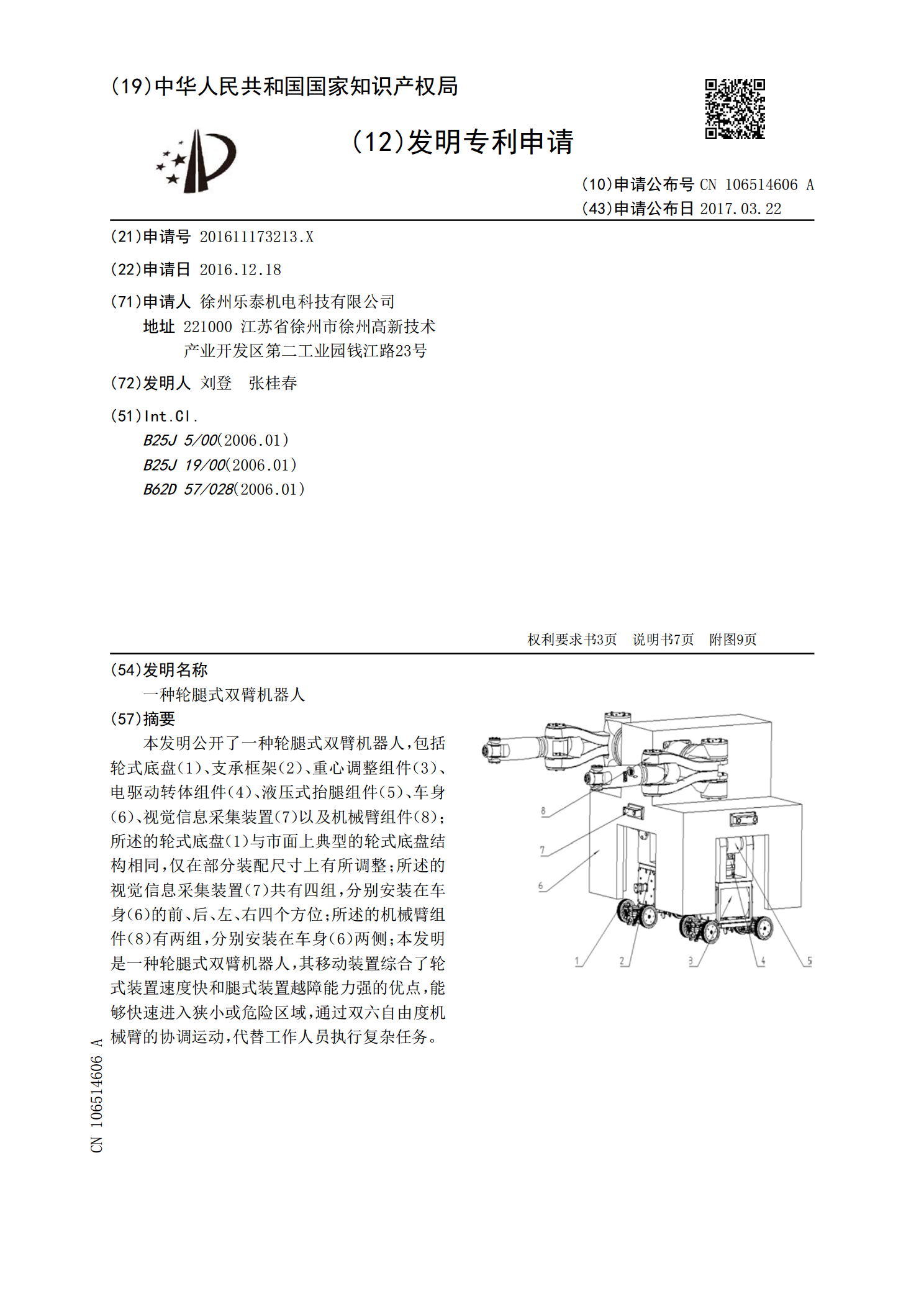
本发明公开了一种轮腿式双臂机器人,包括轮式底盘(1)、支承框架(2)、重心调整组件(3)、电驱动转体组件(4)、液压式抬腿组件(5)、车身(6)、视觉信息采集装置(7)以及机械臂组件(8);所述的轮式底盘(1)与市面上典型的轮式底盘结构相同,仅在部分装配尺寸上有所调整;所述的视觉信息采集装置(7)共有四组,分别安装在车身(6)的前、后、左、右四个方位;所述的机械臂组件(8)有两组,分别安装在车身(6)两侧;本发明是一种轮腿式双臂机器人,其移动装置综合了轮式装置速度快和腿式装置越障能力强的优点,能够快速进入