
一种机器人手臂驱动装置及双臂机器人.pdf

Th****s3


1/10
2/10

3/10

4/10
5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种机器人手臂驱动装置及双臂机器人.pdf
本发明公开了一种机器人手臂驱动装置,包括直线驱动组件、支架、高度可调安装板和关节座;支架具有多条支腿和连接支腿顶端的顶横梁;顶横梁上设置有第一铰支座;高度可调安装板上设置有第二铰支座;关节座的底部纵向设置有第一铰接轴,关节座铰接于第一铰支座上;关节座远离支架的一端设置有用于连接机器人手臂的手臂连接法兰,关节座靠近支架的一端设置有第三铰支座;直线驱动组件的活动端铰接第三铰支座,固定端铰接第二铰支座。本发明还公开了一种双臂机器人。本发明机器人手臂驱动装置可以实现机器人手臂的侧向摆动,使机器人手臂的关节体积缩小

机器人手臂驱动装置.pdf
本发明公开了一种机器人手臂驱动装置,所述的机器人手臂驱动装置包含一第一连接支架和一第二连接支架,所述的第一连接支架通过一第一连杆与所述的第二连接支架相连接,所述的第二连接支架通过一连接凸块与一第二连杆相连接,所述的?第一连接支架的底部设有一可转动的驱动底盘,所述的驱动底盘上设有一对平行设置的驱动模块。本发明的机器人手臂驱动装置利用设置在驱动底盘上的一对平行设置的驱动模块,大大增强了初级电机的驱动能力,同时不必占用较大的空间。另外,由于步进电机的驱动凸轮直接与第一连接支架的连接突片的末端相连接,动力传递更为

一种喷漆机器人手臂装置.pdf
本发明公开了一种喷漆机器人手臂装置,包括底座、机壳和气缸,所述底座下部通过轴承连接有万向轮,所述底座上部通过焊接固定有配重块,所述底座上部通过焊接固定有机壳,所述机壳内部安装有气泵,所述气泵左部安装有进气口,所述远离配重块的一侧安装有处理器,所述处理器左侧安装有操作面板,所述机壳上部安装有气缸,所述气缸内部安装有可伸缩弹簧,所述气缸上部安装有旋转器,所述旋转器右侧安装有驱动电机,所述驱动电机右侧安装有横管,所述横管上部安装有进漆管,所述进漆管右侧安装有调节旋钮,该装置不会体积的大小而限制操作,使用范围广、

机器人手臂的驱动机构.pdf
一种机械臂,含有关节机构,使得机械臂的一肢(310)与机械臂的另一肢(311)围绕两根不平行的旋转轴接合,该机构包括:一个中间托架(28),通过拥有纵摇转动轴(20)的第一转动关节与第一肢相连,通过拥有偏航转动轴(21)的第二转动关节与第二肢相连;第一传动齿轮(33),围绕纵摇转动轴,第一传动齿轮与托架固定;第二传动齿轮(37),围绕偏航转动轴,第二传动齿轮与第二臂固定;第一传动轴(26),驱动第一传动齿轮围绕纵摇转动轴旋转,第一传动轴沿第一肢延伸并在其上有第一轴齿轮(32),第一轴齿轮与第一传动齿轮齿合
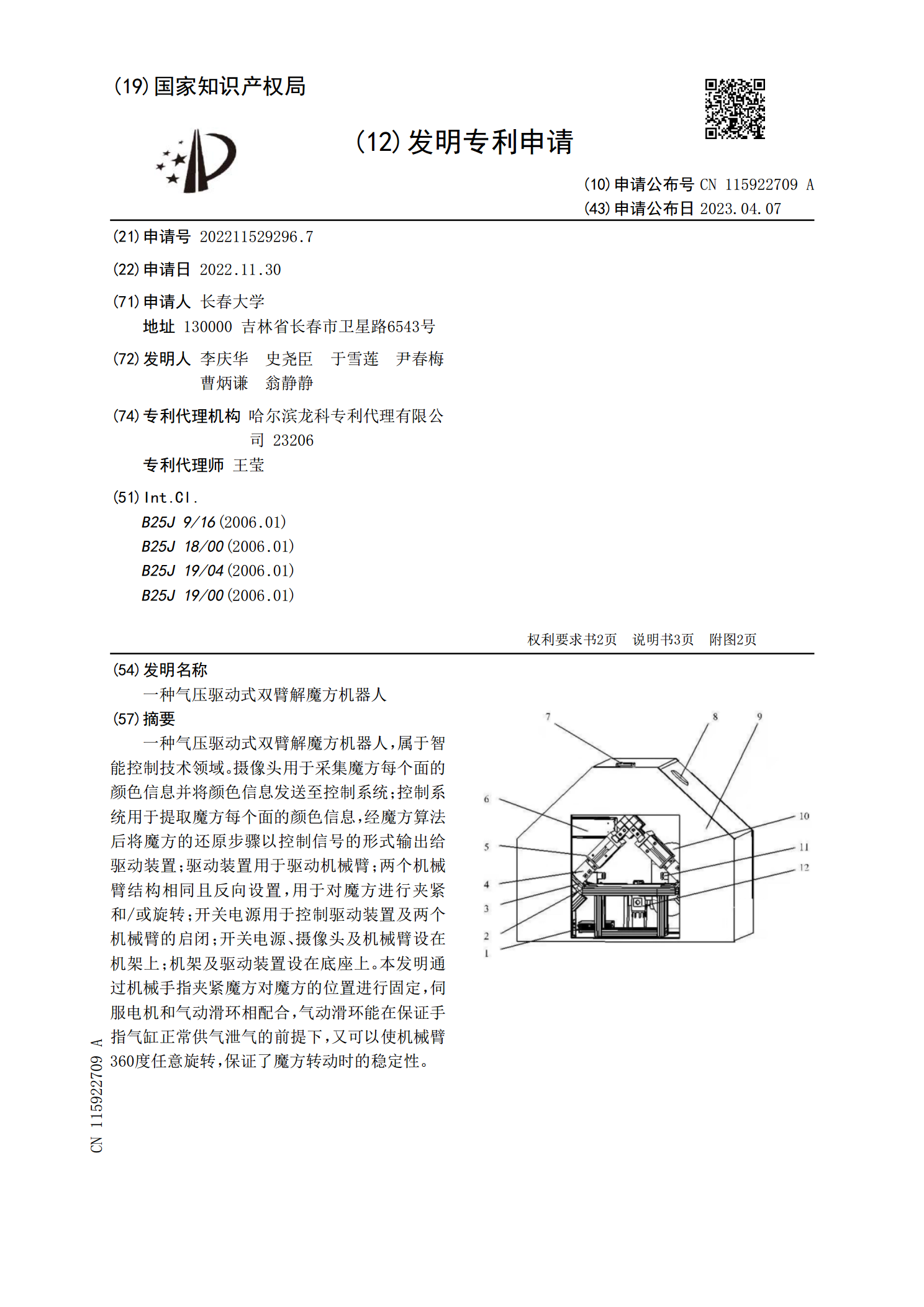
一种气压驱动式双臂解魔方机器人.pdf
一种气压驱动式双臂解魔方机器人,属于智能控制技术领域。摄像头用于采集魔方每个面的颜色信息并将颜色信息发送至控制系统;控制系统用于提取魔方每个面的颜色信息,经魔方算法后将魔方的还原步骤以控制信号的形式输出给驱动装置;驱动装置用于驱动机械臂;两个机械臂结构相同且反向设置,用于对魔方进行夹紧和/或旋转;开关电源用于控制驱动装置及两个机械臂的启闭;开关电源、摄像头及机械臂设在机架上;机架及驱动装置设在底座上。本发明通过机械手指夹紧魔方对魔方的位置进行固定,伺服电机和气动滑环相配合,气动滑环能在保证手指气缸正常供气