
单臂驱动双臂越障式巡线机器人.pdf

Ja****23


1/8
2/8
3/8
4/8

5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

单臂驱动双臂越障式巡线机器人.pdf
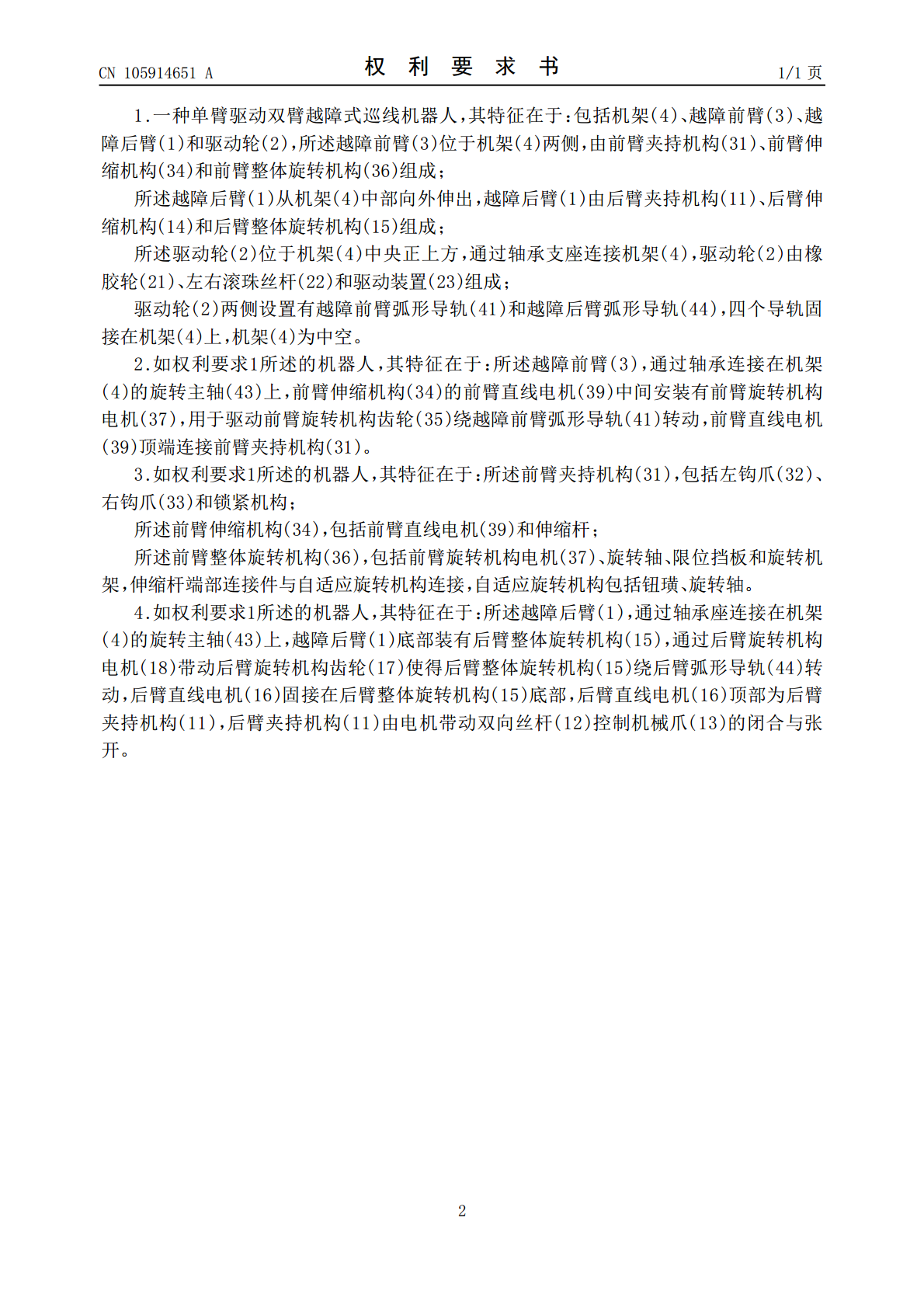
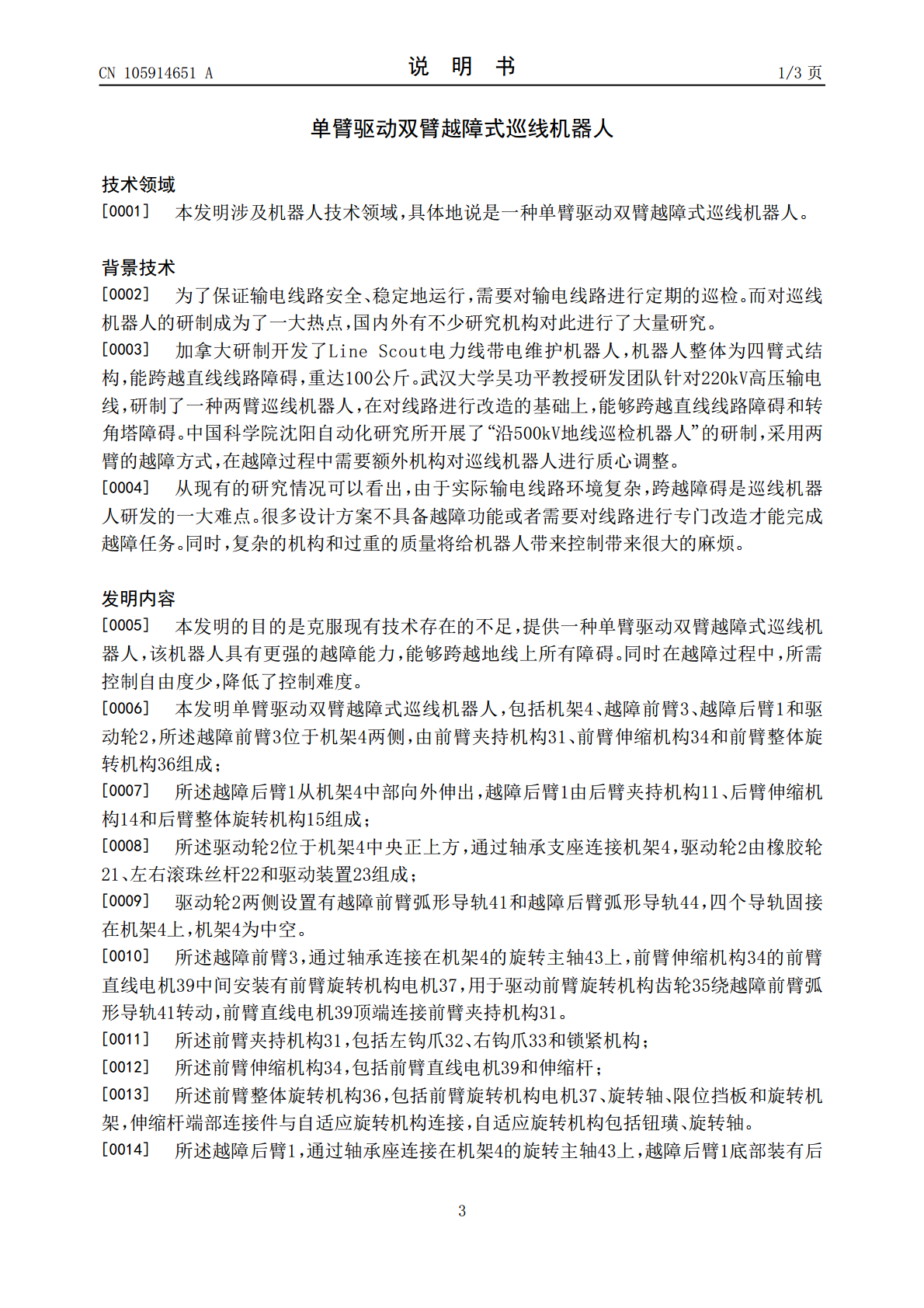
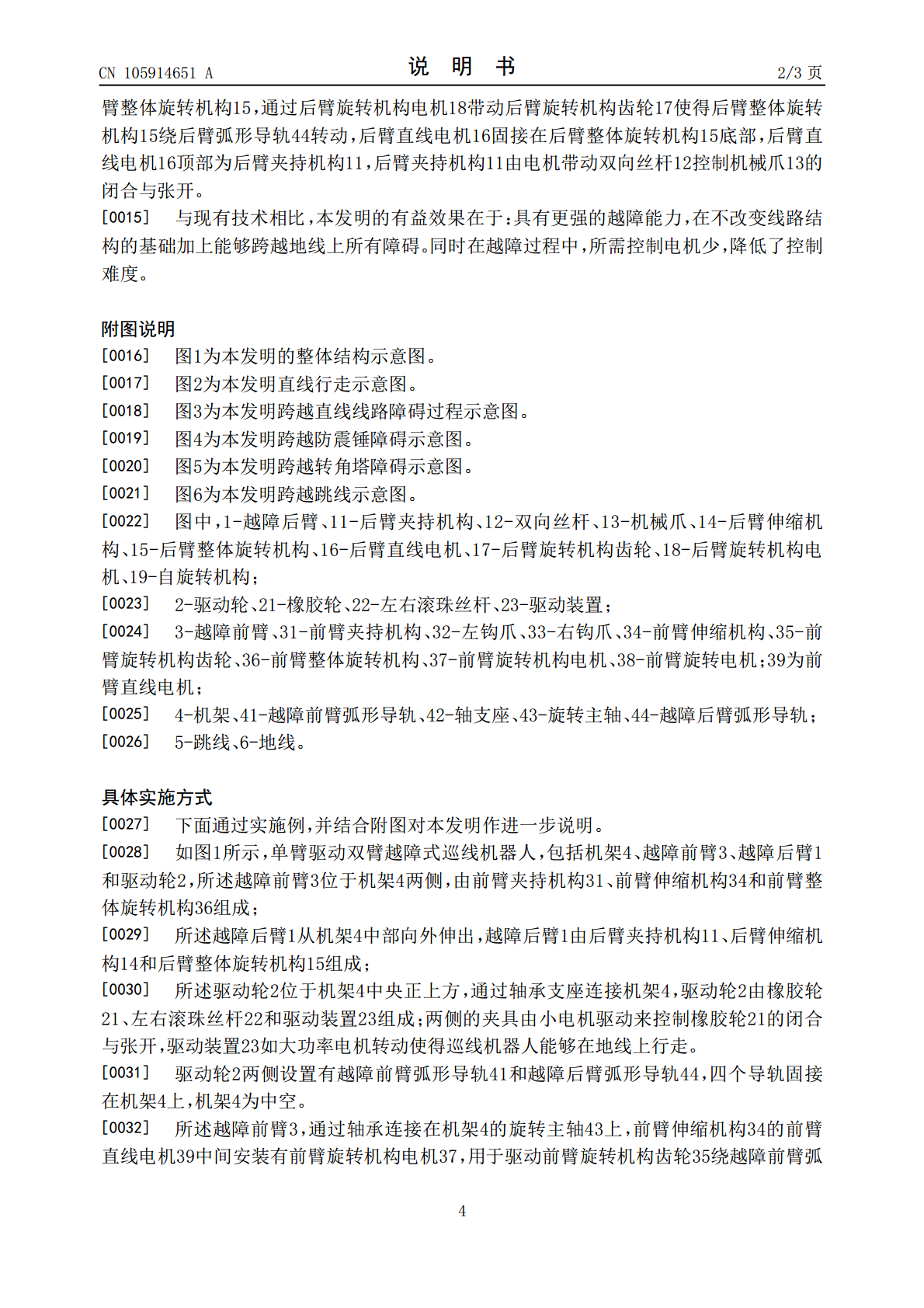
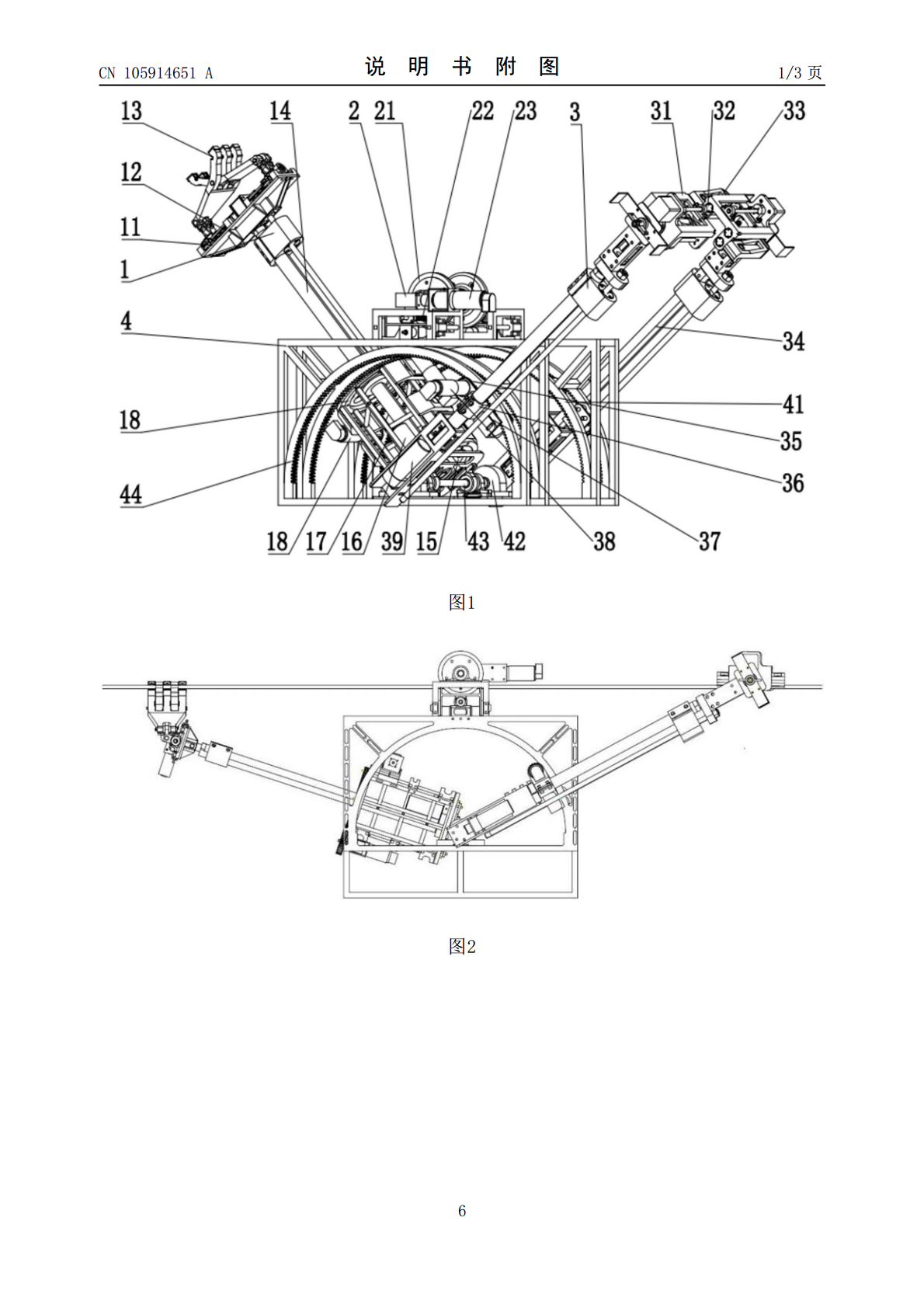
本发明公开了一种单臂驱动双臂越障式巡线机器人,包括机架(4)、越障前臂(3)、越障后臂(1)和驱动轮(2),所述越障前臂(3)位于机架(4)两侧,由前臂夹持机构(31)、前臂伸缩机构(34)和前臂整体旋转机构(36)组成;所述越障后臂(1)从机架(4)中部向外伸出,越障后臂(1)由后臂夹持机构(11)、后臂伸缩机构(14)和后臂整体旋转机构(15)组成;所述驱动轮(2)位于机架(4)中央正上方,通过轴承支座连接机架(4),驱动轮(2)由橡胶轮(21)、左右滚珠丝杆(22)和驱动装置(23)组成。本发明具有

新型双臂巡线机器人越障过程受力分析.docx
新型双臂巡线机器人越障过程受力分析标题:新型双臂巡线机器人越障过程受力分析摘要:随着科技的不断发展,机器人技术日益成熟,双臂巡线机器人作为一种全新的智能设备,具有高度自主性和灵活性。本论文以新型双臂巡线机器人的越障过程为研究对象,通过力学分析方法,探讨机器人在越障过程中所受的各种力的分布和作用方式,以期为机器人越障技术的改进和优化提供理论支持。引言:双臂巡线机器人是一种能够模仿人类上下肢动作的机器人,能够通过摄像头和传感器等设备获取环境信息,实现巡线和越障等任务。在越障过程中,机器人需要不断调整姿态和运动

双臂巡线机器人系统设计与越障控制方法研究.docx
双臂巡线机器人系统设计与越障控制方法研究双臂巡线机器人系统设计与越障控制方法研究摘要:本文介绍了一种基于ROS平台的双臂巡线机器人系统,该系统采用全向轮底盘和两个运动自由度的机械臂进行巡线和越障任务。同时,采用机器视觉技术进行实时图像处理和障碍物检测。本文还研究了一种基于动态规划的越障控制方法,并进行了实际验证。关键词:ROS;双臂机器人;巡线;越障;动态规划。一、引言随着机器人技术的不断发展,各种类型的机器人已经广泛应用于工业、农业、医疗、研究等领域。其中,巡线机器人和越障机器人已成为研究热点。巡线机器

仿昆虫蠕动式双轮双臂巡线机器人机械结构及其越障方法.pdf
本发明公开了一种仿昆虫蠕动式双轮双臂巡线机器人机械结构及其越障方法,属于机器人技术领域,所述仿昆虫蠕动式双轮双臂巡线机器人机械结构包括机架,机架的上部设置有可两侧打开闭合的滚轮臂,滚轮臂上设置分体式滚轮,机架的下部设置有至少一个前向机械臂和后向机械臂,各铰接轴处均通过电机驱动。与现有技术相比,本发明具有减轻劳动强度、降低运行成本,且能够翻越障碍的优点。

双臂巡线机器人系统设计与越障控制方法研究的任务书.docx
双臂巡线机器人系统设计与越障控制方法研究的任务书任务书一、主题双臂巡线机器人系统设计与越障控制方法研究。二、研究目标在本课题中,我们旨在设计一个双臂巡线机器人系统,并研究越障控制的方法,以实现在行驶过程中克服障碍物的能力。具体研究目标如下:1.设计出能够实现自主巡线的双臂机器人系统;2.建立机器人系统的运动学模型,进行动力学分析;3.研究基于视觉传感器的比例导航控制算法,并将其与机器人系统相结合;4.优化越障控制性能,提高机器人越障能力;5.对设计的双臂机器人系统进行实验验证,分析其性能,探究其适用性和实