
双臂解魔方机器人及其使用方法.pdf

飞舟****文章


1/10

2/10
3/10

4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

双臂解魔方机器人及其使用方法.pdf
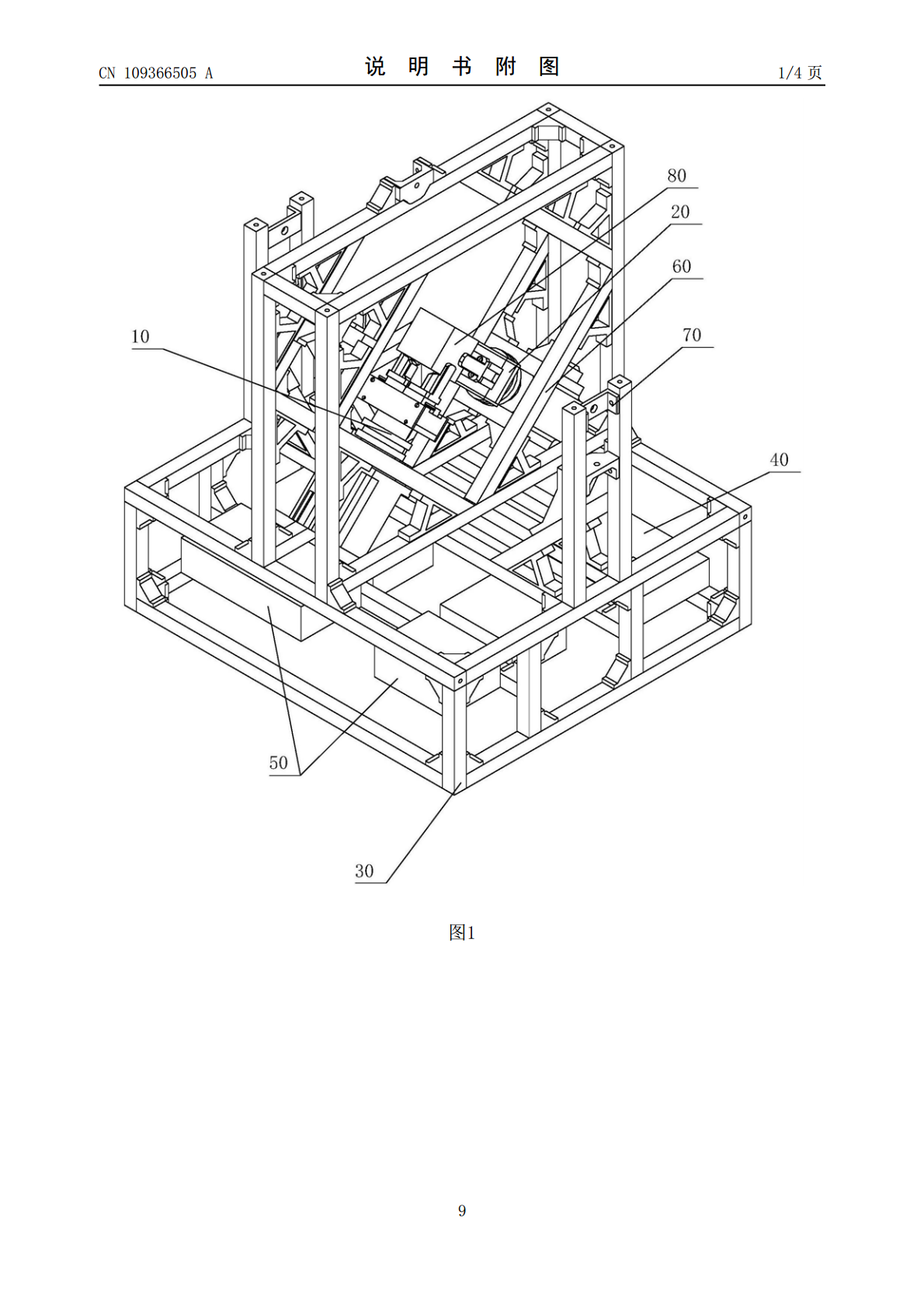
本发明公开了一种双臂解魔方机器人及其使用方法,双臂解魔方机器人包括第一机器臂、第二机器臂、控制箱、控制板、驱动控制机构、机器支架、摄像装置,控制板、驱动控制机构分别安装在控制箱内,所述摄像装置、机器支架分别安装在控制箱的顶面上,第一机器臂、第一机器臂分别安装在机器支架上,第一机器臂、第二机器臂的轴线相互垂直交汇形成魔方夹提位;摄像装置的摄像方向朝向魔方夹提位;第一机器臂、第一机器臂分别通过驱动控制机构与控制板电性连接,摄像装置与控制板电性连接。该双臂解魔方机器人无需改动魔方本体,同时降低了制造成本,降低了
一种气压驱动式双臂解魔方机器人.pdf
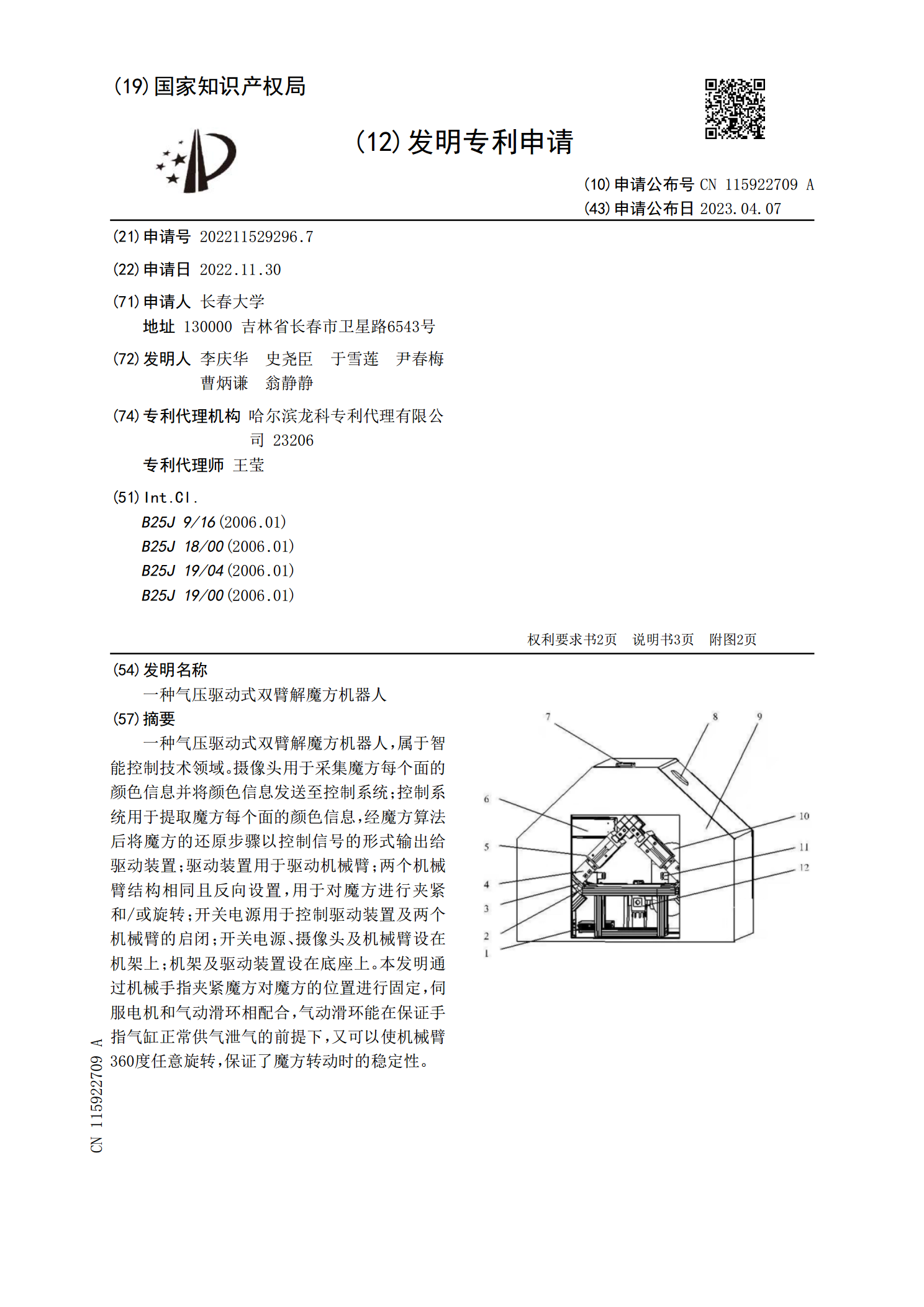
一种气压驱动式双臂解魔方机器人,属于智能控制技术领域。摄像头用于采集魔方每个面的颜色信息并将颜色信息发送至控制系统;控制系统用于提取魔方每个面的颜色信息,经魔方算法后将魔方的还原步骤以控制信号的形式输出给驱动装置;驱动装置用于驱动机械臂;两个机械臂结构相同且反向设置,用于对魔方进行夹紧和/或旋转;开关电源用于控制驱动装置及两个机械臂的启闭;开关电源、摄像头及机械臂设在机架上;机架及驱动装置设在底座上。本发明通过机械手指夹紧魔方对魔方的位置进行固定,伺服电机和气动滑环相配合,气动滑环能在保证手指气缸正常供气

筒型六轴解魔方机器人装置、系统及使用方法.pdf
本发明涉及一种筒型六轴解魔方机器人装置、系统及使用方法,装置包括筒状支撑、底部卡盘、顶部卡盘、四个滑台和六个电机,其中:筒状支撑内部空间用于容纳魔方,侧壁设有呈“十”字型分布的四个通孔;六个电机分别为四个侧面电机、一个顶部电机和一个底部电机,均由电机本体和联轴器组成;四个滑台分别与四个通孔匹配设置于筒状支撑外侧壁上,用于四个侧面电机的移动和固定,使四个侧面电机的联轴器穿过通孔与魔方的四个侧面连接;底部卡盘和顶部卡盘分别用于固定底部电机和顶部电机。与现有技术相比,本发明简单易制作,装配方便,方便展览,运转可

一种可自主抓取魔方的智能解魔方机器人及其解魔方方法.pdf
本发明公开了一种可自主抓取魔方的智能解魔方机器人及其解魔方方法,包括机器人本体、桁架、控制主机、摄像头、手臂摆动结构、机械臂和魔方仓,在桁架上设置用于放置魔方的魔方仓,桁架上还设有用于确保魔方规整的整形仓,机器人本体上连接有两个相对的用于进行解魔方动作的机械臂,机器人本体上固定有的手臂摆动结构,手臂摆动结构与机械臂相连接,手臂摆动结构带动机械臂伸向魔方仓,到位后通过气爪抓取魔方。本发明的智能解魔方机器人结构简单可靠,具有良好的互动性,可自主抓取魔方,通过先进的易扩展的图像识别技术获取魔方信息,安全性高,具

执行模块、魔方还原机器人及其使用方法.pdf
本发明提供了一种执行模块、魔方还原机器人及其使用方法,包括上位机控制模块、下位机控制模块、执行模块以及电源模块;所述上位机控制模块用于获取魔方的初始状态信息,根据所述初始状态信息生成魔法还原控制信息并将所述魔法还原控制信息发送给所述下位机控制模块;所述下位机控制模块用于根据所述魔法还原控制信息控制所述执行模块进行魔方还原操作;所述电源模块用于所述上位机控制模块、所述下位机控制模块以及所述执行模块中任一模块或任多模块的供电。本发明电源模块上采用了执行模块和下位机控制模块由同一个电源模块供电的方式,这种方式大