
一种轮腿两用机器人.pdf

靖烟****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种可两用的轮腿式机器人腿结构.pdf
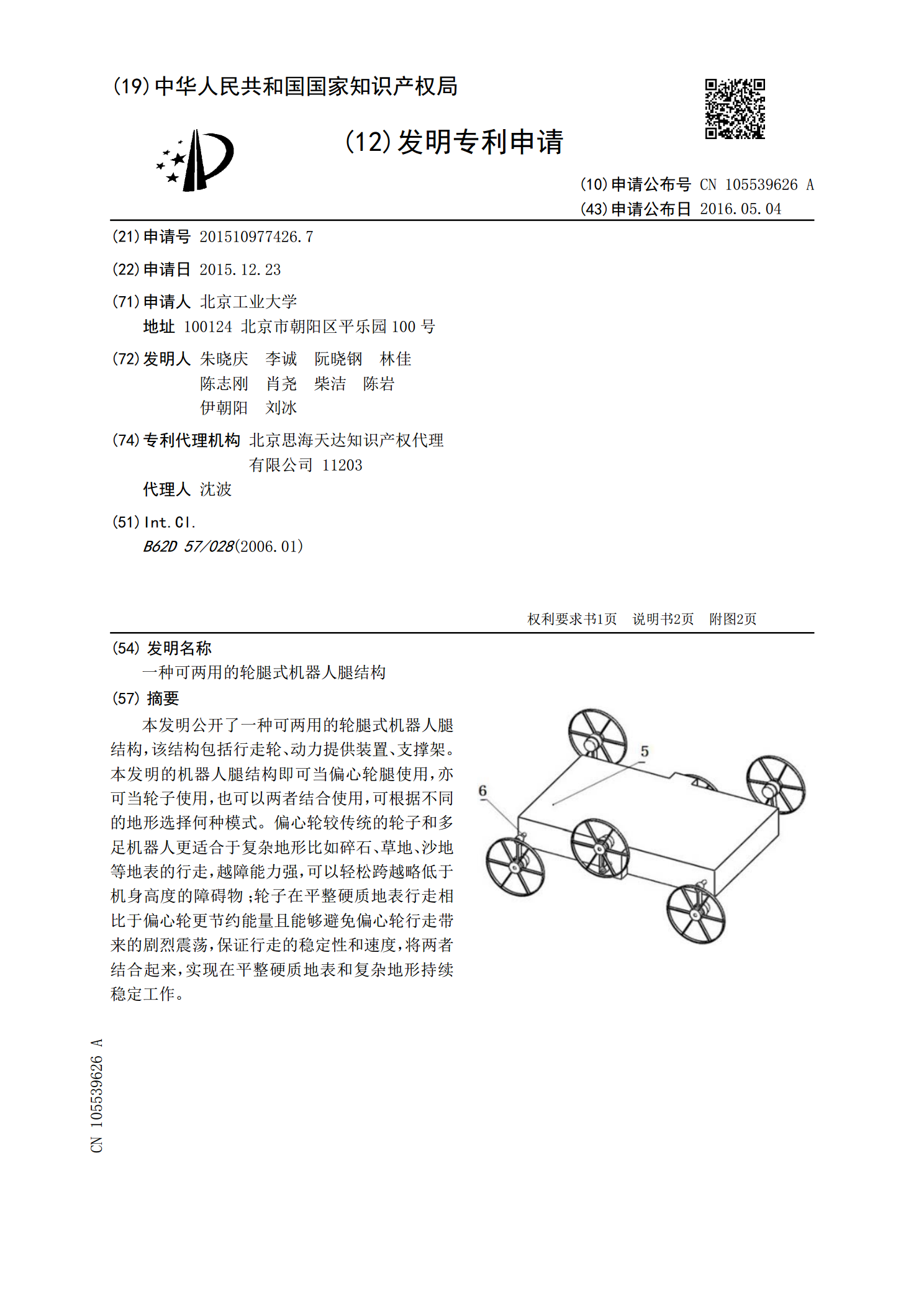
本发明公开了一种可两用的轮腿式机器人腿结构,该结构包括行走轮、动力提供装置、支撑架。本发明的机器人腿结构即可当偏心轮腿使用,亦可当轮子使用,也可以两者结合使用,可根据不同的地形选择何种模式。偏心轮较传统的轮子和多足机器人更适合于复杂地形比如碎石、草地、沙地等地表的行走,越障能力强,可以轻松跨越略低于机身高度的障碍物;轮子在平整硬质地表行走相比于偏心轮更节约能量且能够避免偏心轮行走带来的剧烈震荡,保证行走的稳定性和速度,将两者结合起来,实现在平整硬质地表和复杂地形持续稳定工作。

一种轮腿两用机器人.pdf
本发明提供一种结构简单和成本低的一种轮腿两用机器人,包括动力装置、主体和轮腿,具有一个或一个以上双向驱动的动力装置,两个或两个以上轮腿,轮腿包含驱动轮腿或导向轮腿或驱动导向轮腿,轮腿与主体之间使用一个或两个自由度的活动关节联接;每个轮腿包含一个或一个以上活动关节,末端装有轮子,动力装置安装在主体内,驱动轮腿的轮子由动力装置产生的动力经主体和轮腿的传动装置驱动;活动关节使用分动装置或液压系统驱动,每个活动关节均可独立运动,动力装置安装在主体内,轮腿轻,驱动力大,负重能力和适应性强。

一种轮足两用复合式移动机器人腿.pdf
本发明涉及一种轮足两用复合式移动机器人腿,第二同步带轮通过第一轴承和第三轴承与车体连接,通过第一大轮轮毂与第一大轮连接,通过第二轴承与第一轴连接;第一大轮轮毂与第一同步带轮连接,第一同步带轮通过同步带与第三同步带轮连接;第二大轮组合与第三同步带轮连接,同时通过第五轴承与第三轴连接;第一轴通过第二轴承与第二同步带轮连接,与长连杆通过键槽连接;电机驱动器、电机谐波减速器组合安装在长连杆上,第三轴通过第六轴承与长连杆连接;短连杆与第三轴连接,另一端与第二轴连接;小轮、小轮轮毂通过第四轴承与第二轴连接,小轮轮毂与
一种轮腿式机器人.pdf
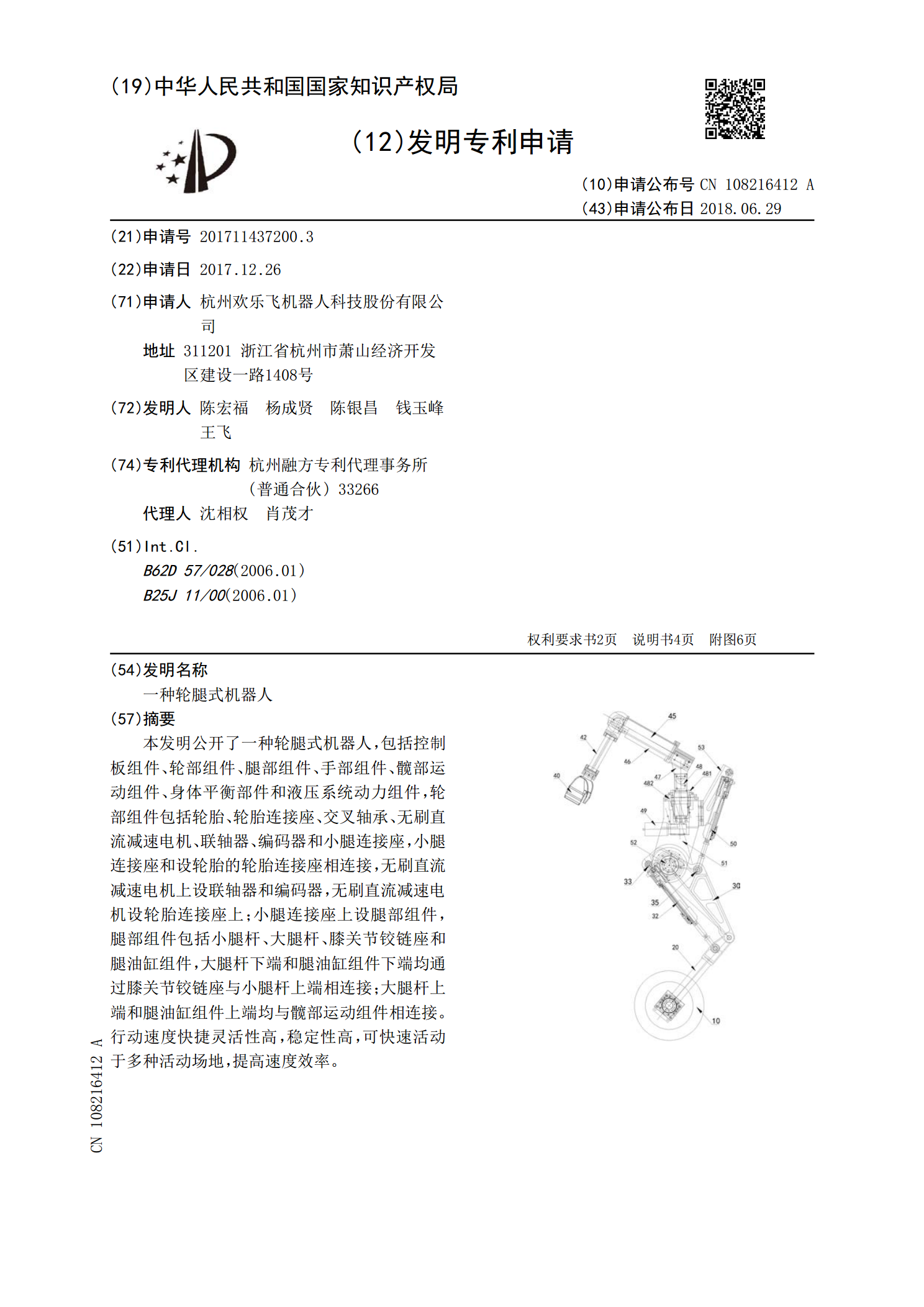
本发明公开了一种轮腿式机器人,包括控制板组件、轮部组件、腿部组件、手部组件、髋部运动组件、身体平衡部件和液压系统动力组件,轮部组件包括轮胎、轮胎连接座、交叉轴承、无刷直流减速电机、联轴器、编码器和小腿连接座,小腿连接座和设轮胎的轮胎连接座相连接,无刷直流减速电机上设联轴器和编码器,无刷直流减速电机设轮胎连接座上;小腿连接座上设腿部组件,腿部组件包括小腿杆、大腿杆、膝关节铰链座和腿油缸组件,大腿杆下端和腿油缸组件下端均通过膝关节铰链座与小腿杆上端相连接;大腿杆上端和腿油缸组件上端均与髋部运动组件相连接。行动
一种变形轮装置、轮履腿行走装置及轮履腿机器人.pdf
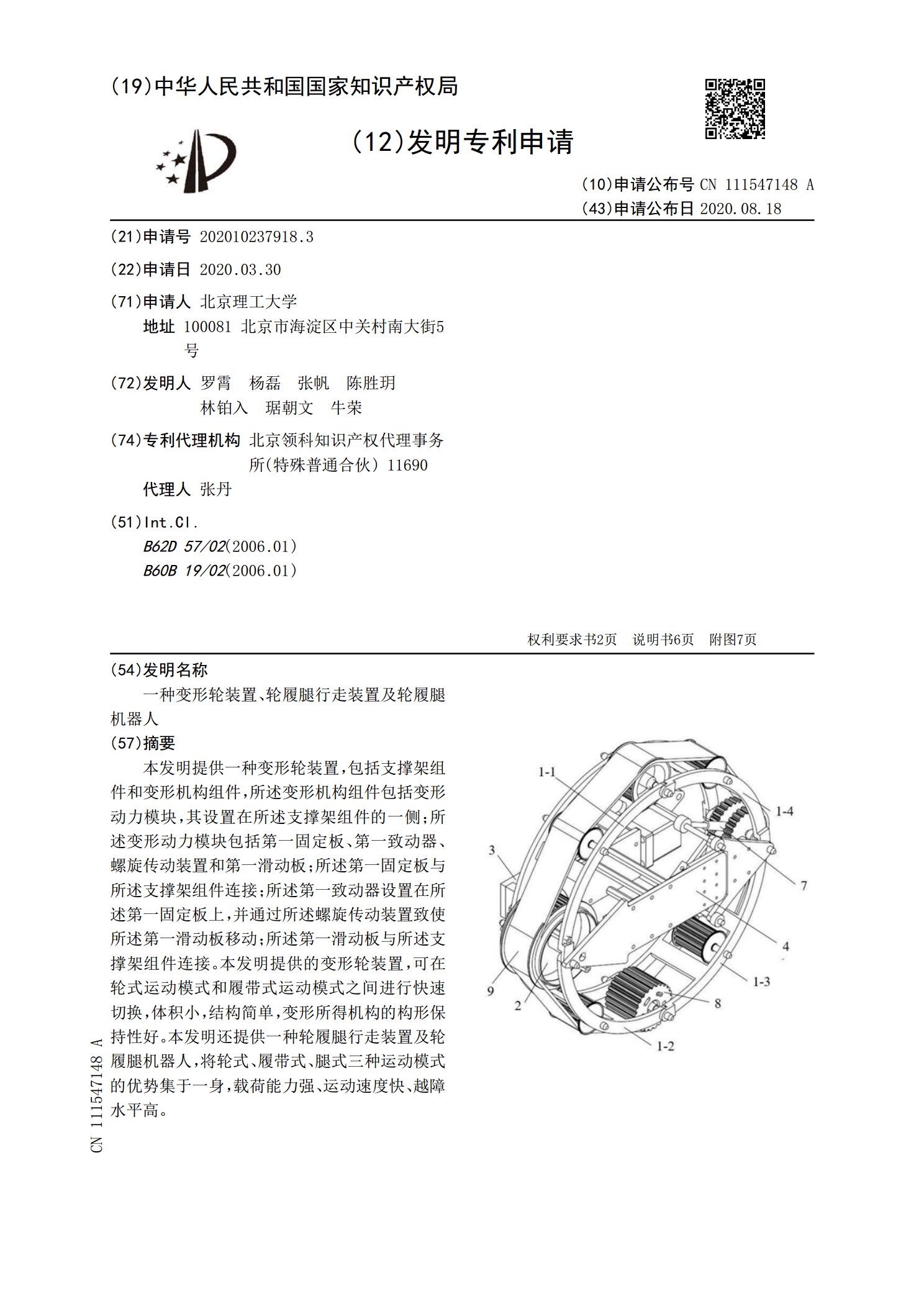
本发明提供一种变形轮装置,包括支撑架组件和变形机构组件,所述变形机构组件包括变形动力模块,其设置在所述支撑架组件的一侧;所述变形动力模块包括第一固定板、第一致动器、螺旋传动装置和第一滑动板;所述第一固定板与所述支撑架组件连接;所述第一致动器设置在所述第一固定板上,并通过所述螺旋传动装置致使所述第一滑动板移动;所述第一滑动板与所述支撑架组件连接。本发明提供的变形轮装置,可在轮式运动模式和履带式运动模式之间进行快速切换,体积小,结构简单,变形所得机构的构形保持性好。本发明还提供一种轮履腿行走装置及轮履腿机器人