
一种ROV调平辅助装置及ROV.pdf

建英****66

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种ROV调平辅助装置及ROV.pdf
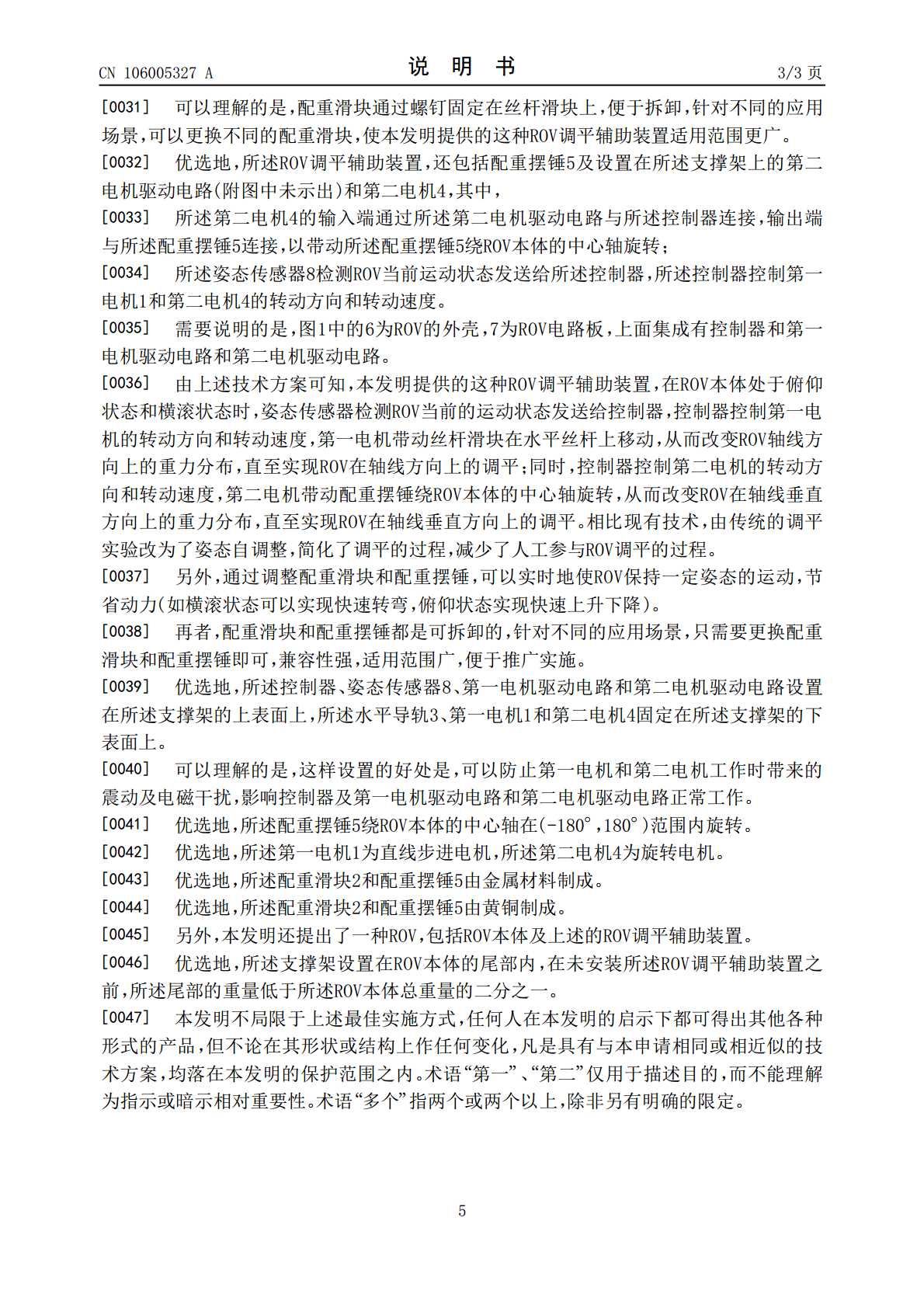
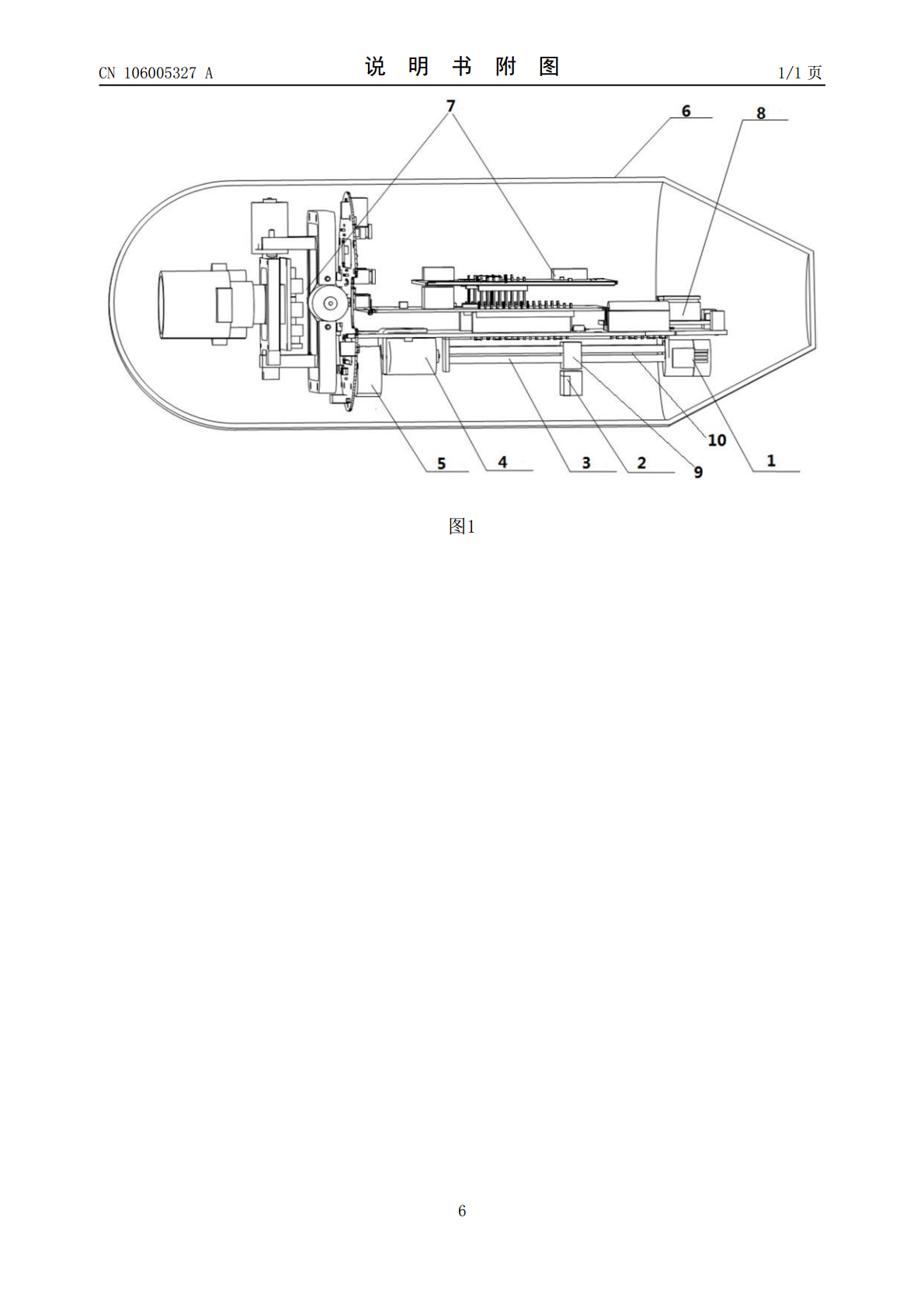
本发明具体涉及一种ROV调平辅助装置及ROV,该ROV调平辅助装置包括设置在ROV本体内的支撑架上的控制器、姿态传感器、水平导轨、水平丝杆、丝杆滑块、第一电机驱动电路及第一电机,其中,水平导轨与ROV本体同轴;所述水平丝杆设置在所述水平导轨内,丝杆滑块设置在水平丝杆上;所述第一电机的输入端通过所述第一电机驱动电路与所述控制器连接,输出端与所述水平丝杆连接,以带动所述丝杆滑块在所述水平丝杆上移动;所述姿态传感器与所述控制器连接;所述姿态传感器检测ROV当前的运动状态发送给所述控制器,所述控制器控制第一电机的

一种ROV绞车线缆辅助牵引装置.pdf
本发明公开了一种ROV绞车线缆辅助牵引装置,包括支撑架、电机和挤压轮对,支撑架包括外固定框架和多个内滑动框架,挤压轮对包括两个挤压轮,每个挤压轮均包括挤压轮轴及旋转轮,每个挤压轮轴分别固定安装在一个内滑动框架上;挤压轮对的两个旋转轮之间存在空隙,以用于夹住线缆;每个内滑动框架分别滑动安装在外固定框架上;至少一个旋转轮通过电机驱动进行旋转,从而带动被两个旋转轮夹住的线缆移动。本发明的ROV绞车线缆辅助牵引装置,可安装在绞车和ROV之间后,通过电机的扭矩或转速的调节,辅助实现对整个辅助牵引装置恒扭矩或恒转速的
一种新型ROV推进器及ROV.pdf
本发明具体涉及一种新型ROV推进器及ROV,包括转子、转轴、磁耦合装置和减速机,磁耦合装置与减速机轴承之间设置有间隙调整垫片;转子为中空的圆柱状结构,转子与转轴过盈配合;转轴包括依次连接的齿轮段、咬合段、传动段和固定段,其中,齿轮段用于与ROV推进器的行星减速机连接;咬合段用于限定齿轮段与转子的相对位置;传动段与转子过盈配合,用于向转子传递扭矩;固定段上套设有固定件,固定件用于紧固转子与转轴的过盈配合。本发明提供的技术方案,由于转子和转轴可拆卸连接,方便了转轴上与行星减速机连接的齿轮的加工及精度控制;同时

ROV水下辅助摄像系统设计研究.docx
ROV水下辅助摄像系统设计研究摘要为了提高水下工作的安全性和效率,在ROV(遥控操作载具)的设计过程中,水下辅助摄像系统的设计和研究变得越来越重要。本文通过对ROV系统和水下辅助摄像系统的介绍,探究了水下辅助摄像系统的设计、性能和可靠性等关键问题,旨在为ROV系统的优化设计提供参考。关键词:ROV;水下辅助摄像系统;性能;可靠性引言ROV是一种远程控制的水下载具,广泛应用于海洋工程、水下考古、水下搜救等领域。在深海作业中,ROV扮演着极其重要的角色。然而,由于深海环境的恶劣和复杂,ROV系统的设计和研究面
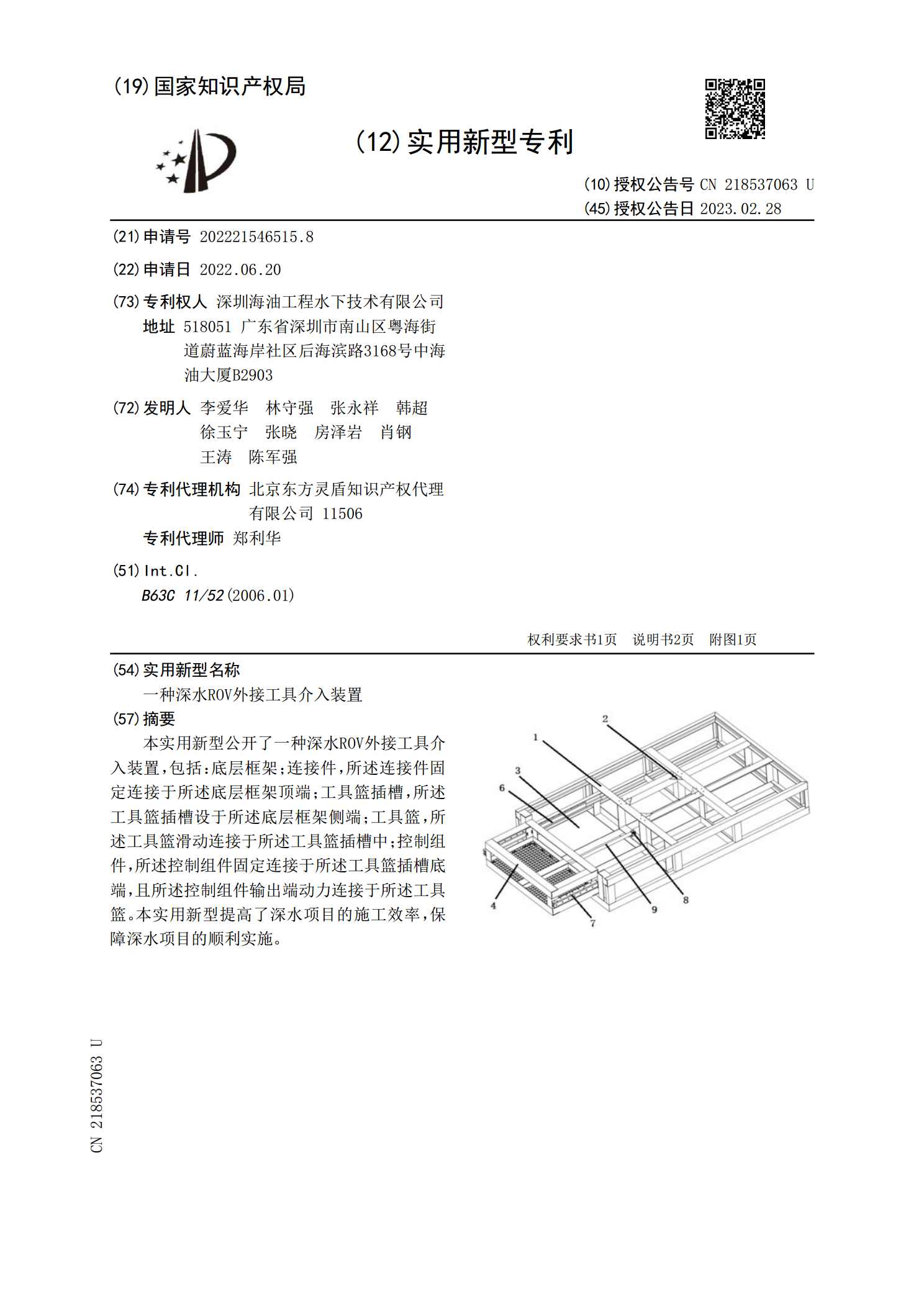
一种深水ROV外接工具介入装置.pdf
本实用新型公开了一种深水ROV外接工具介入装置,包括:底层框架;连接件,所述连接件固定连接于所述底层框架顶端;工具篮插槽,所述工具篮插槽设于所述底层框架侧端;工具篮,所述工具篮滑动连接于所述工具篮插槽中;控制组件,所述控制组件固定连接于所述工具篮插槽底端,且所述控制组件输出端动力连接于所述工具篮。本实用新型提高了深水项目的施工效率,保障深水项目的顺利实施。