
一种新型ROV推进器及ROV.pdf

篷璐****爱吗

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种新型ROV推进器及ROV.pdf
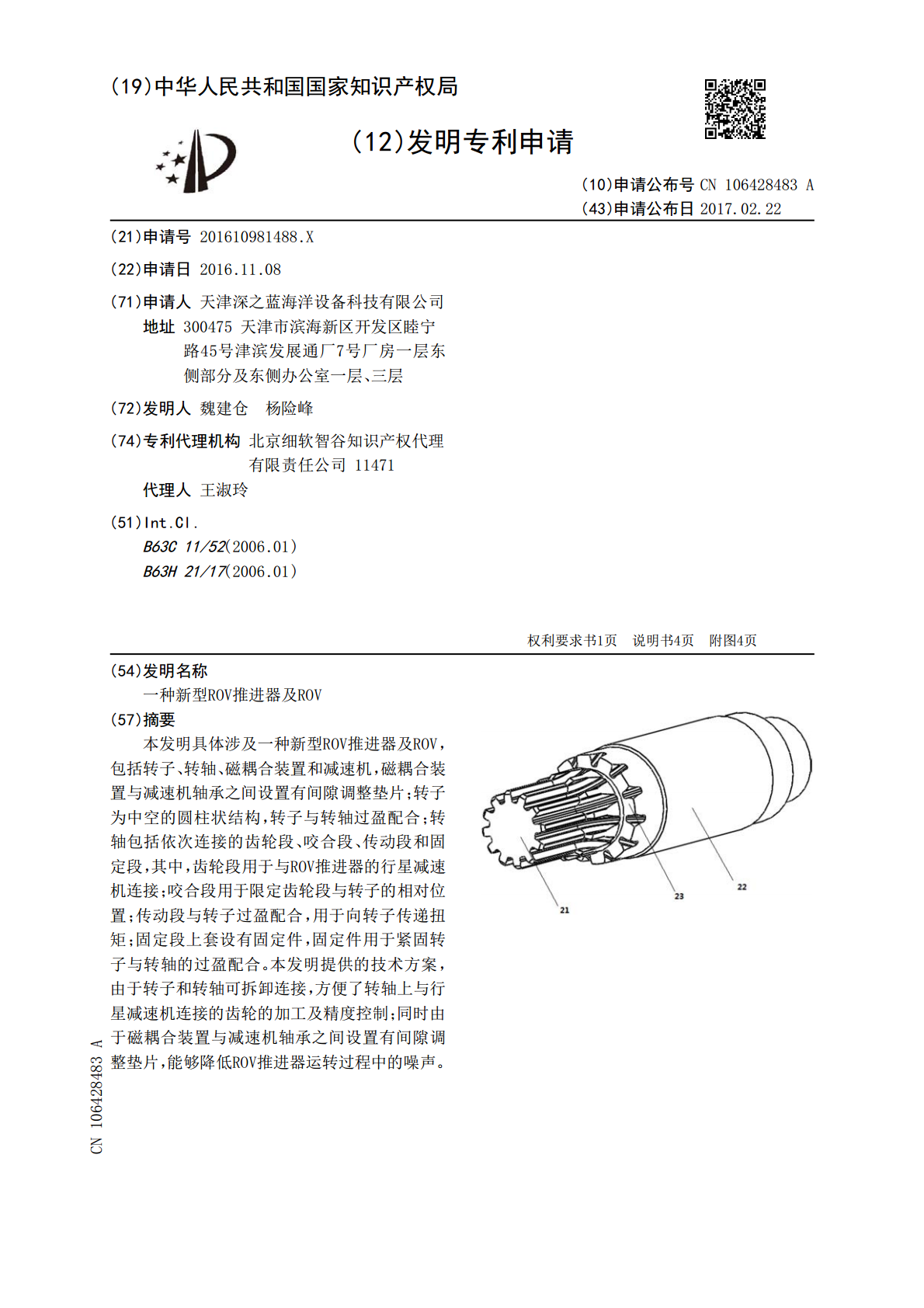
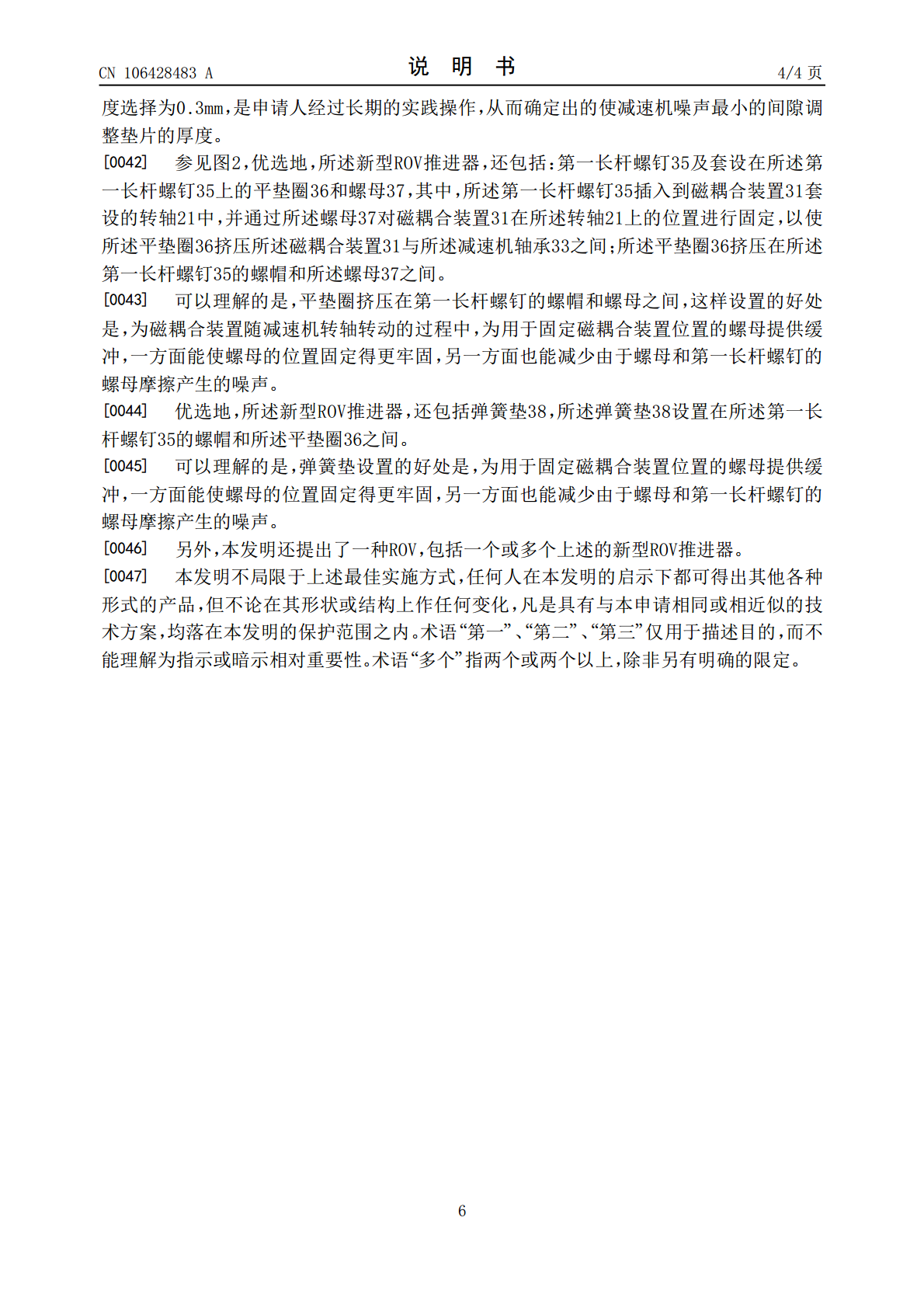
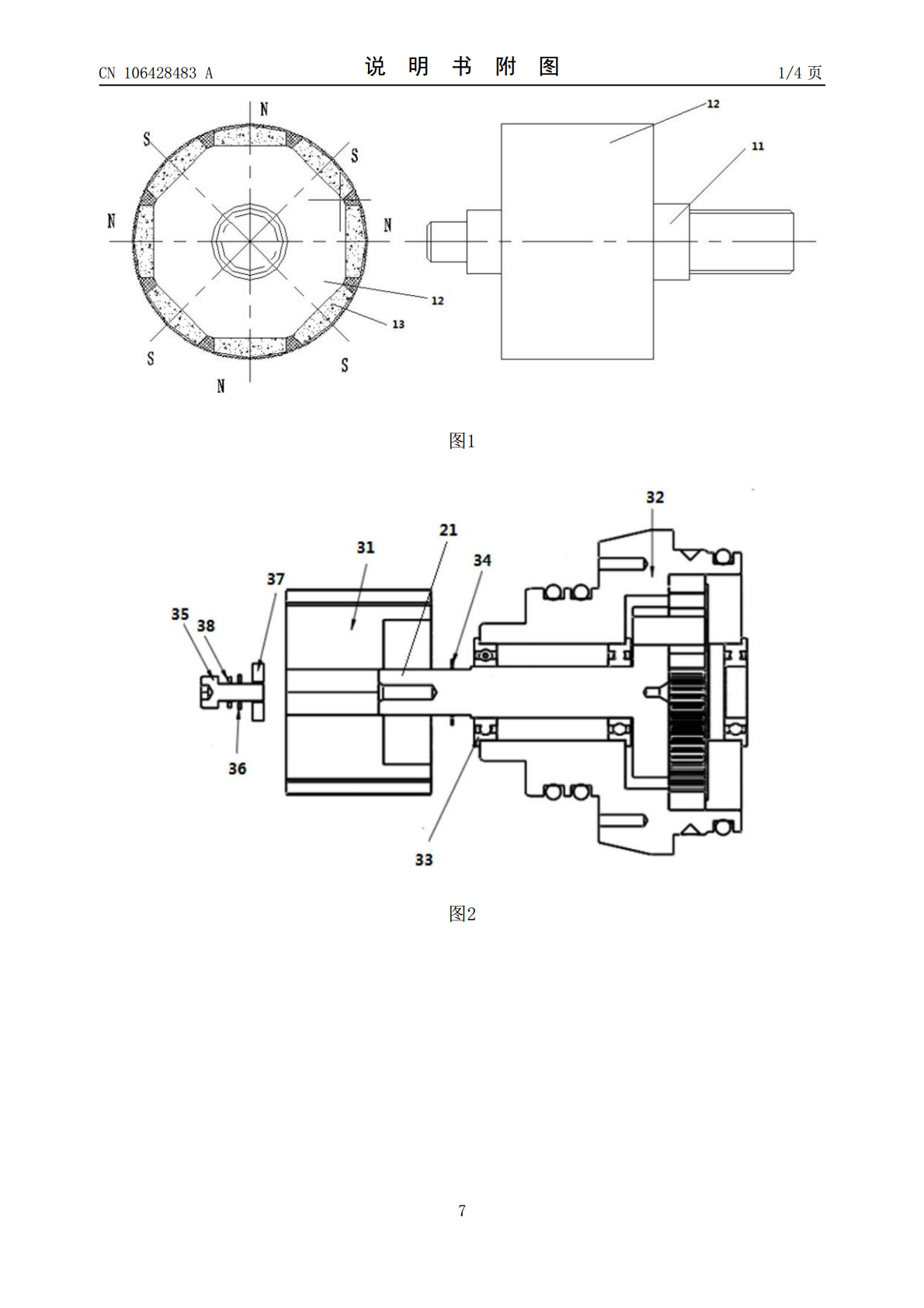
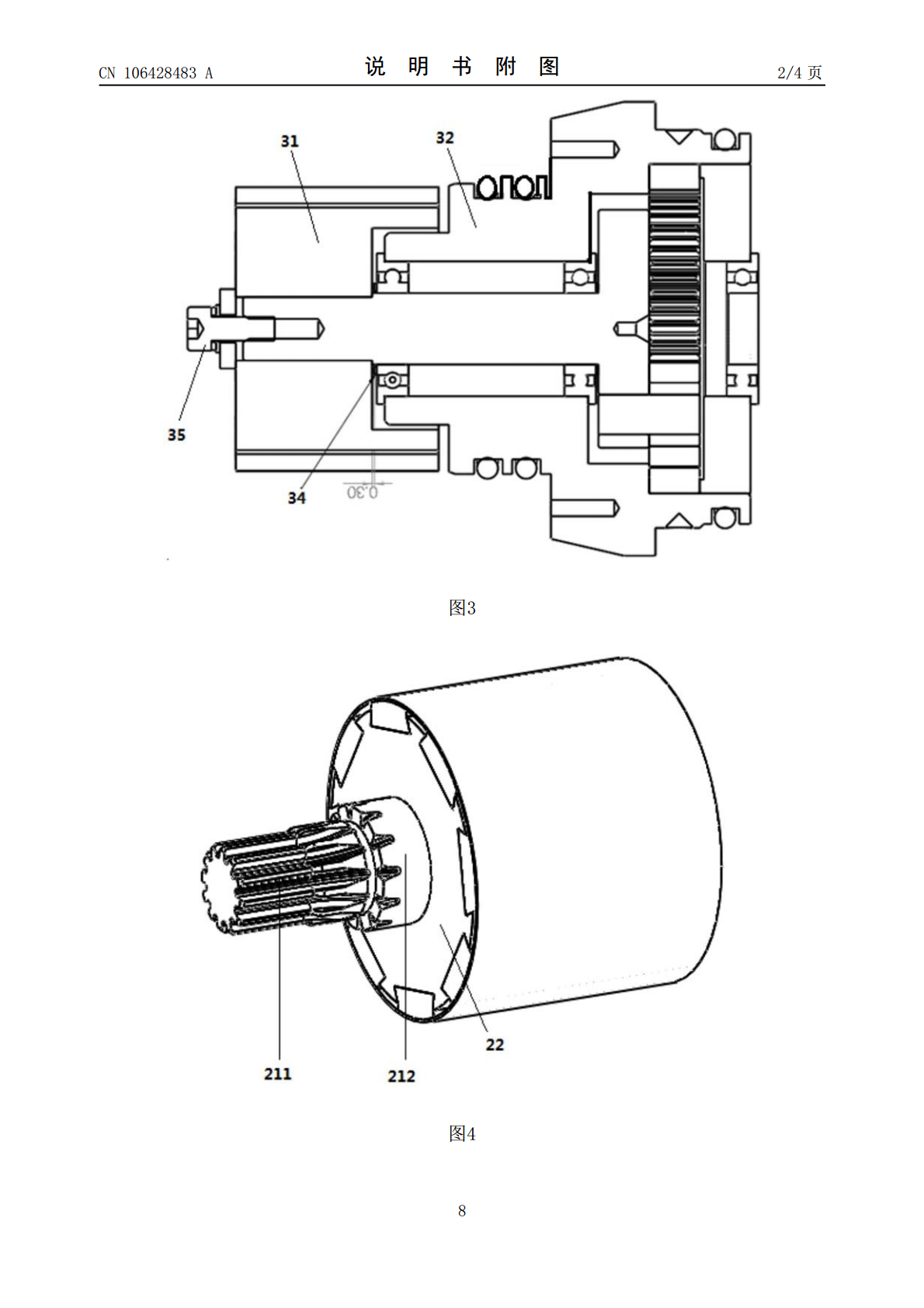
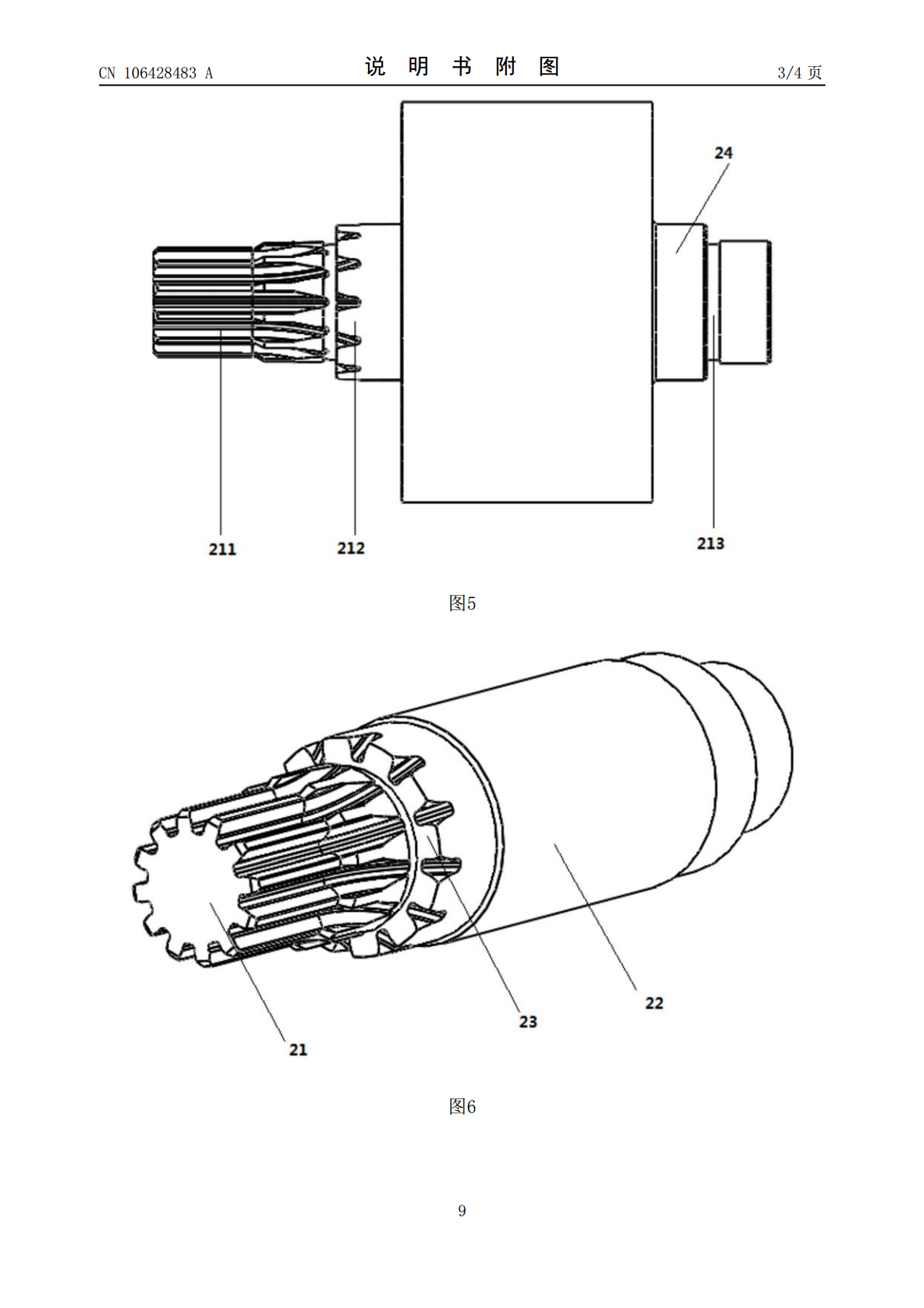
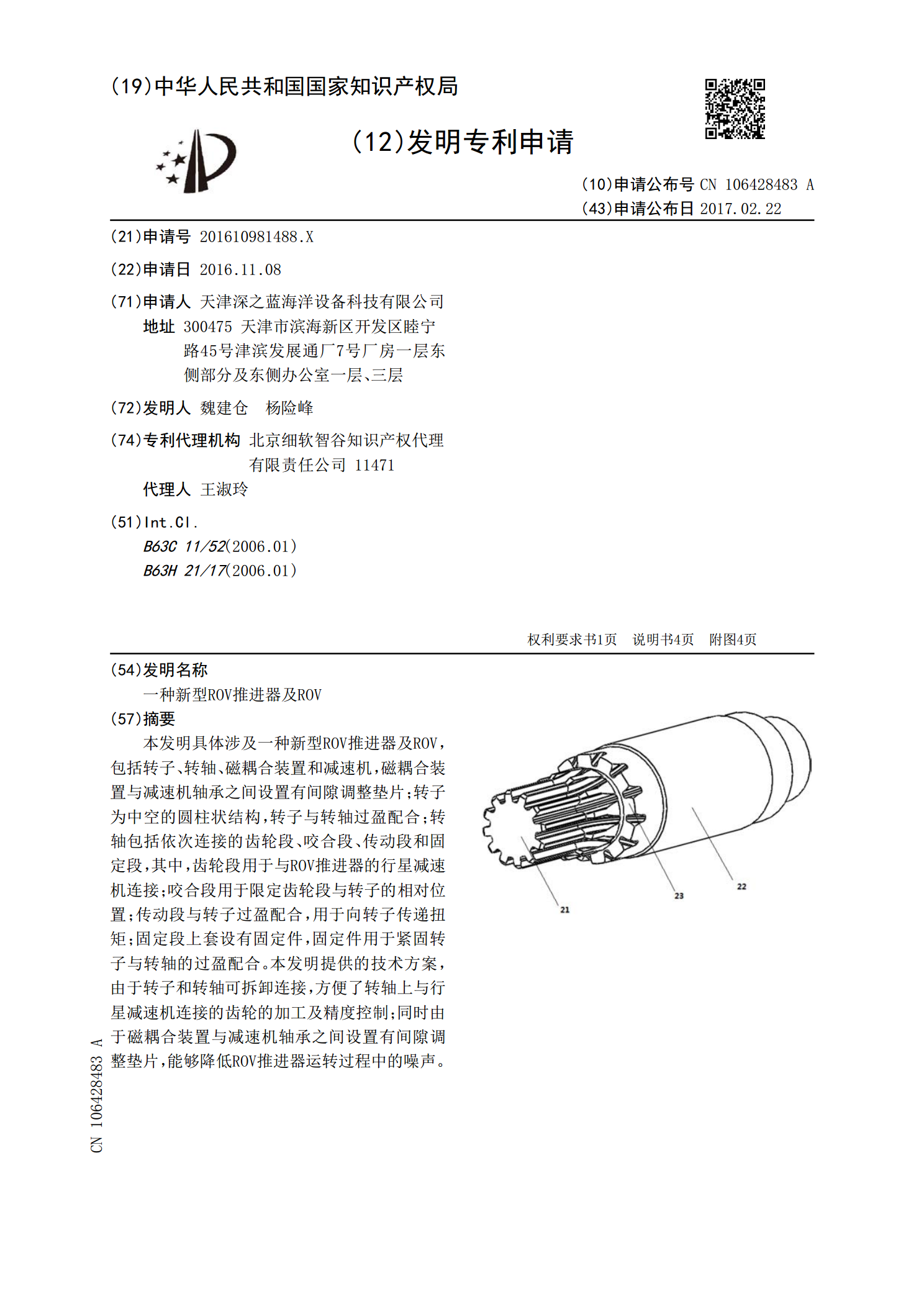
本发明具体涉及一种新型ROV推进器及ROV,包括转子、转轴、磁耦合装置和减速机,磁耦合装置与减速机轴承之间设置有间隙调整垫片;转子为中空的圆柱状结构,转子与转轴过盈配合;转轴包括依次连接的齿轮段、咬合段、传动段和固定段,其中,齿轮段用于与ROV推进器的行星减速机连接;咬合段用于限定齿轮段与转子的相对位置;传动段与转子过盈配合,用于向转子传递扭矩;固定段上套设有固定件,固定件用于紧固转子与转轴的过盈配合。本发明提供的技术方案,由于转子和转轴可拆卸连接,方便了转轴上与行星减速机连接的齿轮的加工及精度控制;同时
一种分离式电机转子转轴、ROV推进器电机、ROV推进器及ROV.pdf
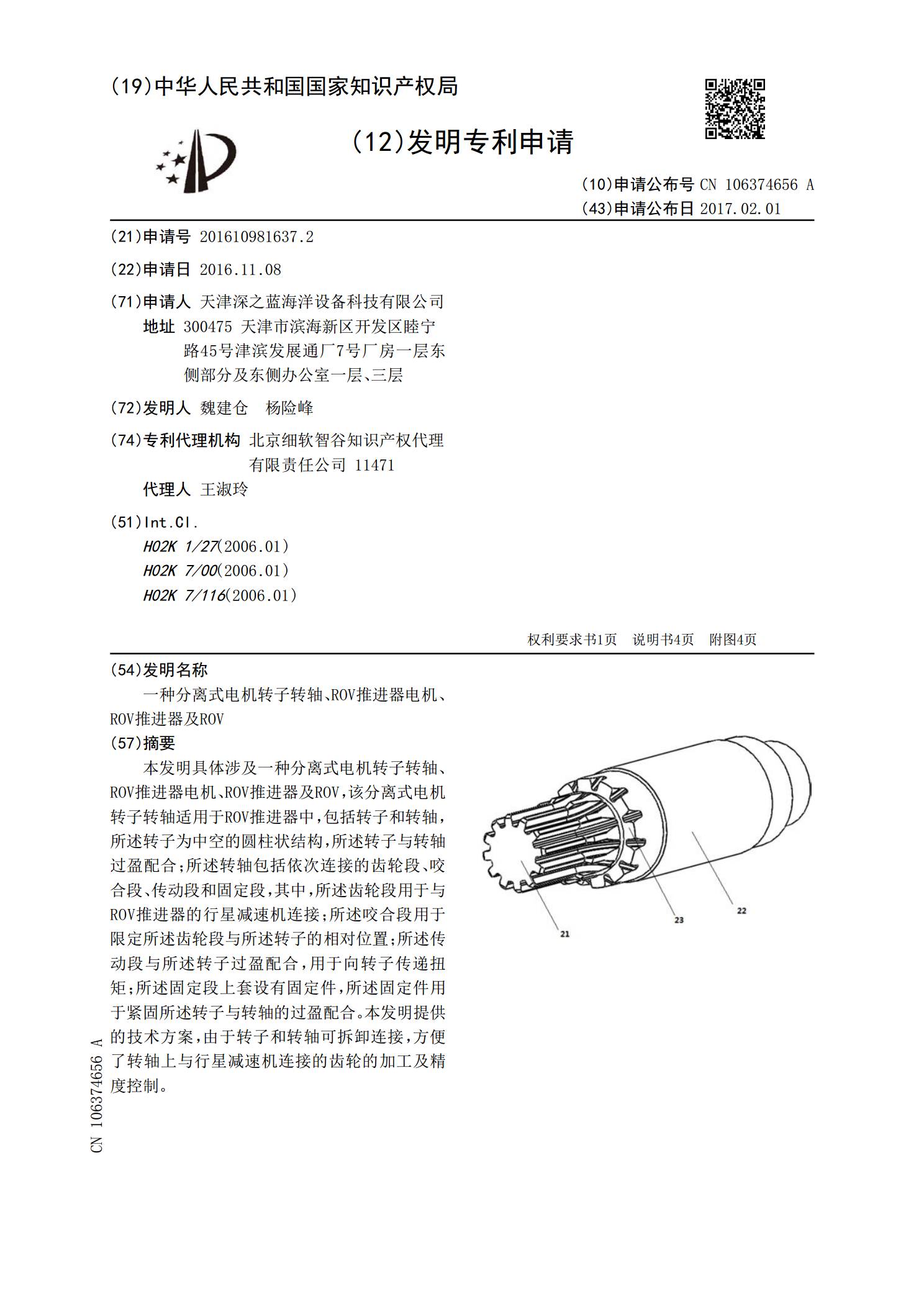
本发明具体涉及一种分离式电机转子转轴、ROV推进器电机、ROV推进器及ROV,该分离式电机转子转轴适用于ROV推进器中,包括转子和转轴,所述转子为中空的圆柱状结构,所述转子与转轴过盈配合;所述转轴包括依次连接的齿轮段、咬合段、传动段和固定段,其中,所述齿轮段用于与ROV推进器的行星减速机连接;所述咬合段用于限定所述齿轮段与所述转子的相对位置;所述传动段与所述转子过盈配合,用于向转子传递扭矩;所述固定段上套设有固定件,所述固定件用于紧固所述转子与转轴的过盈配合。本发明提供的技术方案,由于转子和转轴可拆卸连接

ROV推进器非线性控制研究.docx
ROV推进器非线性控制研究标题:ROV推进器非线性控制研究摘要:随着无人遥控潜水器(ROV)在水下作业中的广泛应用,ROV推进器的控制研究变得越来越重要。然而,由于ROV推进器系统的非线性特性,传统的线性控制方法往往难以实现良好的性能。因此,本论文主要研究ROV推进器非线性控制方法,以提高ROV在水下作业中的控制性能和稳定性。关键词:无人遥控潜水器(ROV),推进器,非线性控制,性能,稳定性1.引言无人遥控潜水器(ROV)是一种在水下进行各种任务的无人机器人。它通常配备有多个推进器,以实现水下姿态调节和运
一种ROV调平辅助装置及ROV.pdf
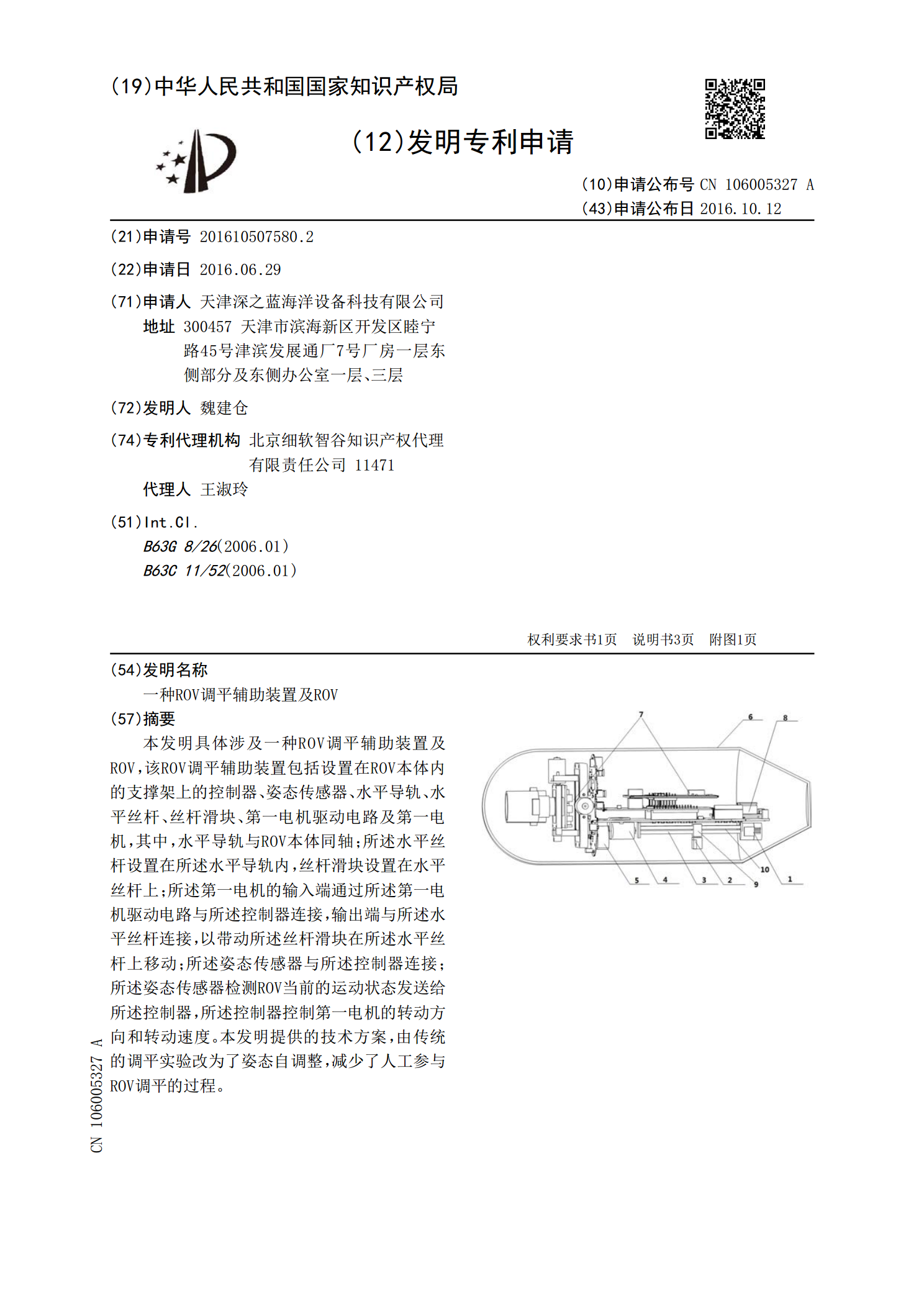
本发明具体涉及一种ROV调平辅助装置及ROV,该ROV调平辅助装置包括设置在ROV本体内的支撑架上的控制器、姿态传感器、水平导轨、水平丝杆、丝杆滑块、第一电机驱动电路及第一电机,其中,水平导轨与ROV本体同轴;所述水平丝杆设置在所述水平导轨内,丝杆滑块设置在水平丝杆上;所述第一电机的输入端通过所述第一电机驱动电路与所述控制器连接,输出端与所述水平丝杆连接,以带动所述丝杆滑块在所述水平丝杆上移动;所述姿态传感器与所述控制器连接;所述姿态传感器检测ROV当前的运动状态发送给所述控制器,所述控制器控制第一电机的
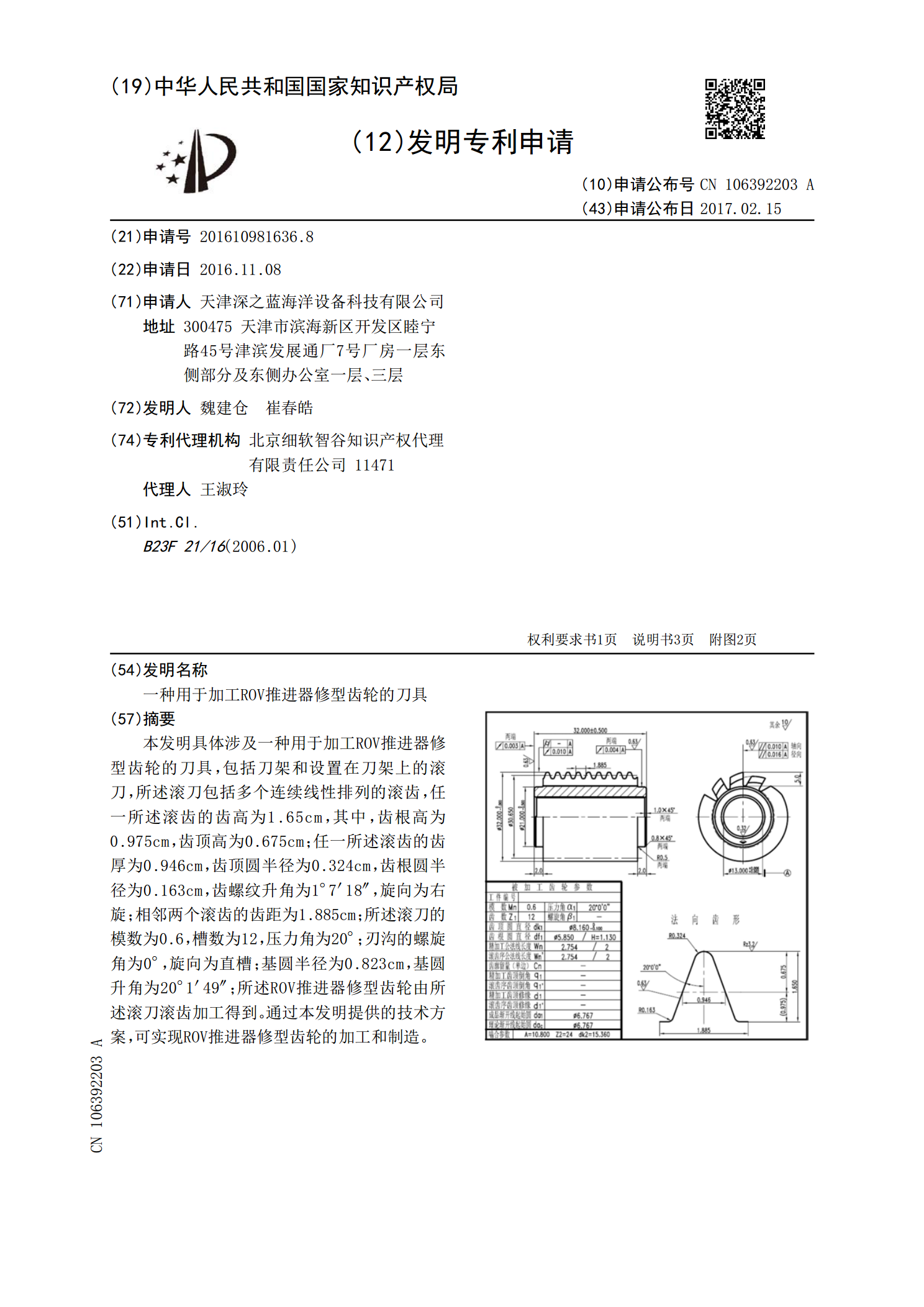
一种用于加工ROV推进器修型齿轮的刀具.pdf
本发明具体涉及一种用于加工ROV推进器修型齿轮的刀具,包括刀架和设置在刀架上的滚刀,所述滚刀包括多个连续线性排列的滚齿,任一所述滚齿的齿高为1.65cm,其中,齿根高为0.975cm,齿顶高为0.675cm;任一所述滚齿的齿厚为0.946cm,齿顶圆半径为0.324cm,齿根圆半径为0.163cm,齿螺纹升角为1°7′18″,旋向为右旋;相邻两个滚齿的齿距为1.885cm;所述滚刀的模数为0.6,槽数为12,压力角为20°;刃沟的螺旋角为0°,旋向为直槽;基圆半径为0.823cm,基圆升角为20°1′49