
船舶纵向动态减摇方法与装置.pdf

一只****ua

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
船舶纵向动态减摇方法与装置.pdf
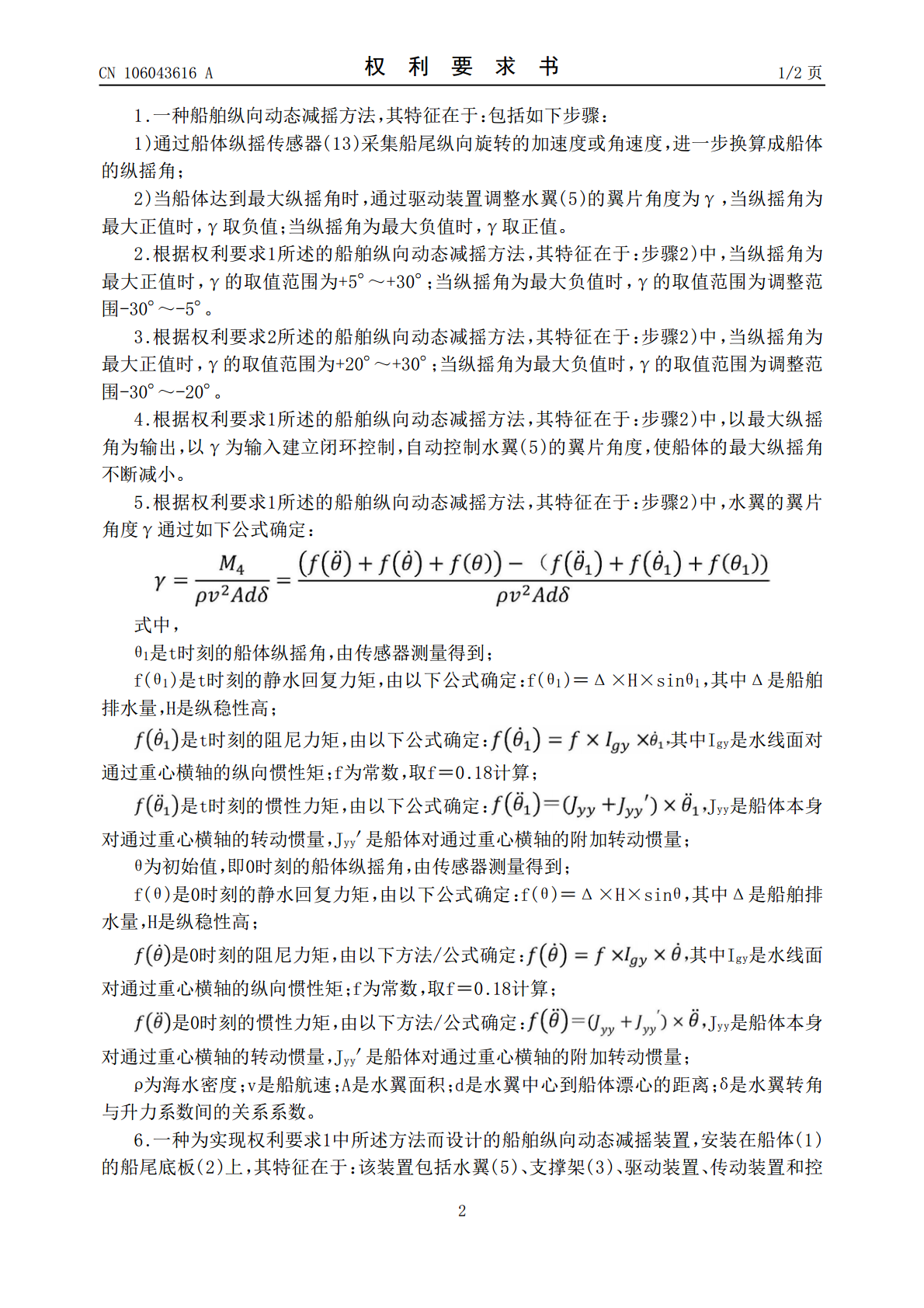
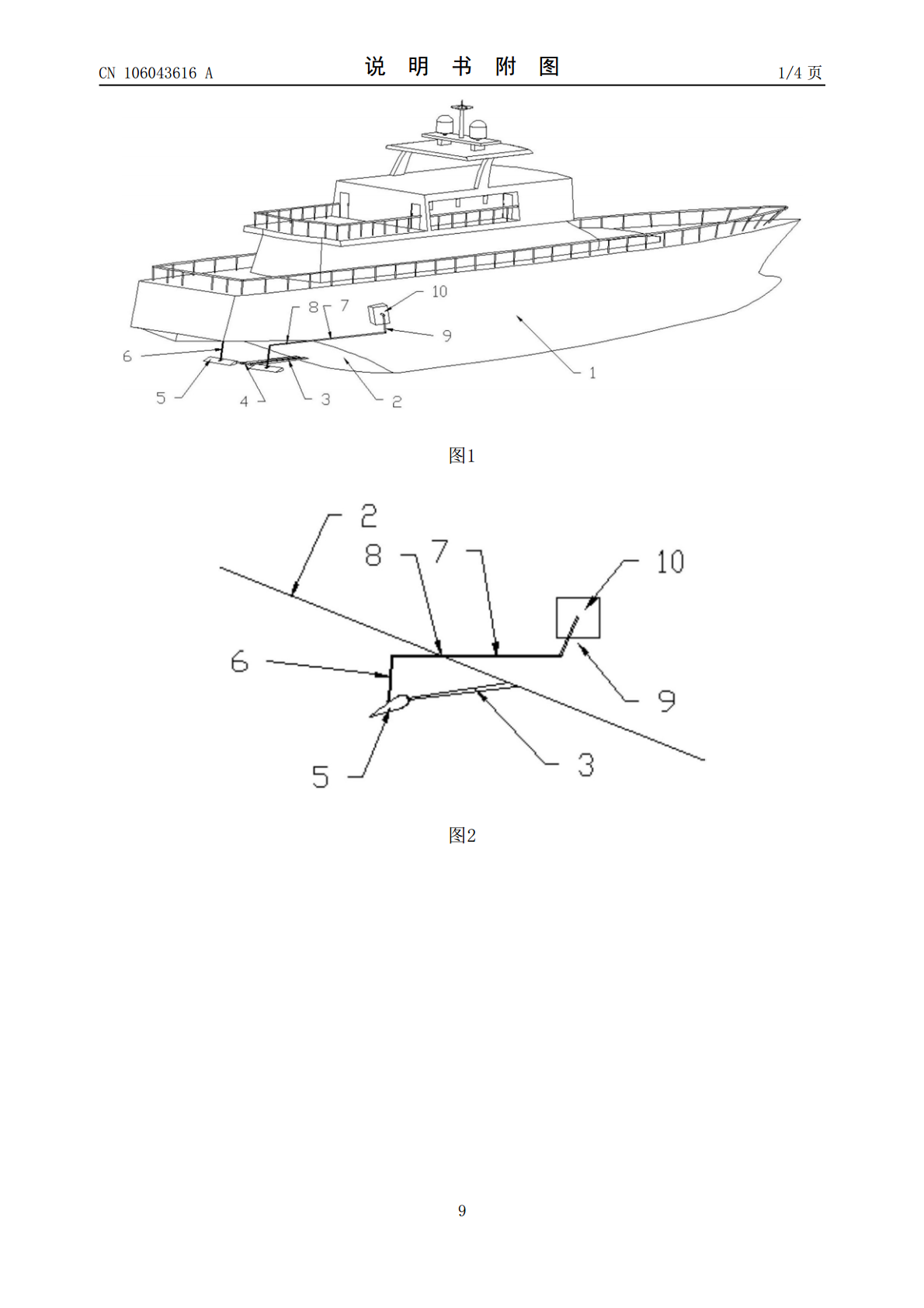
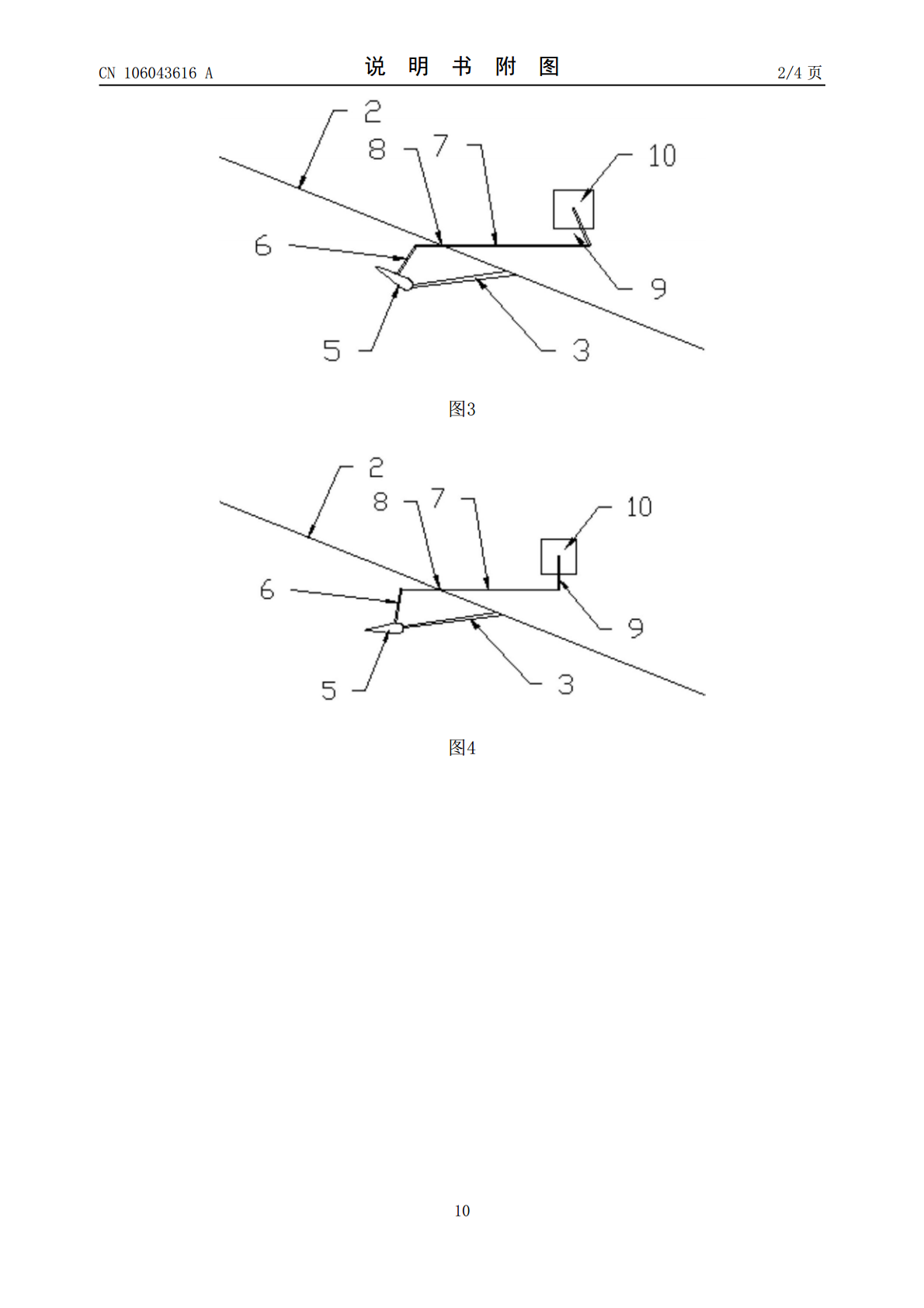
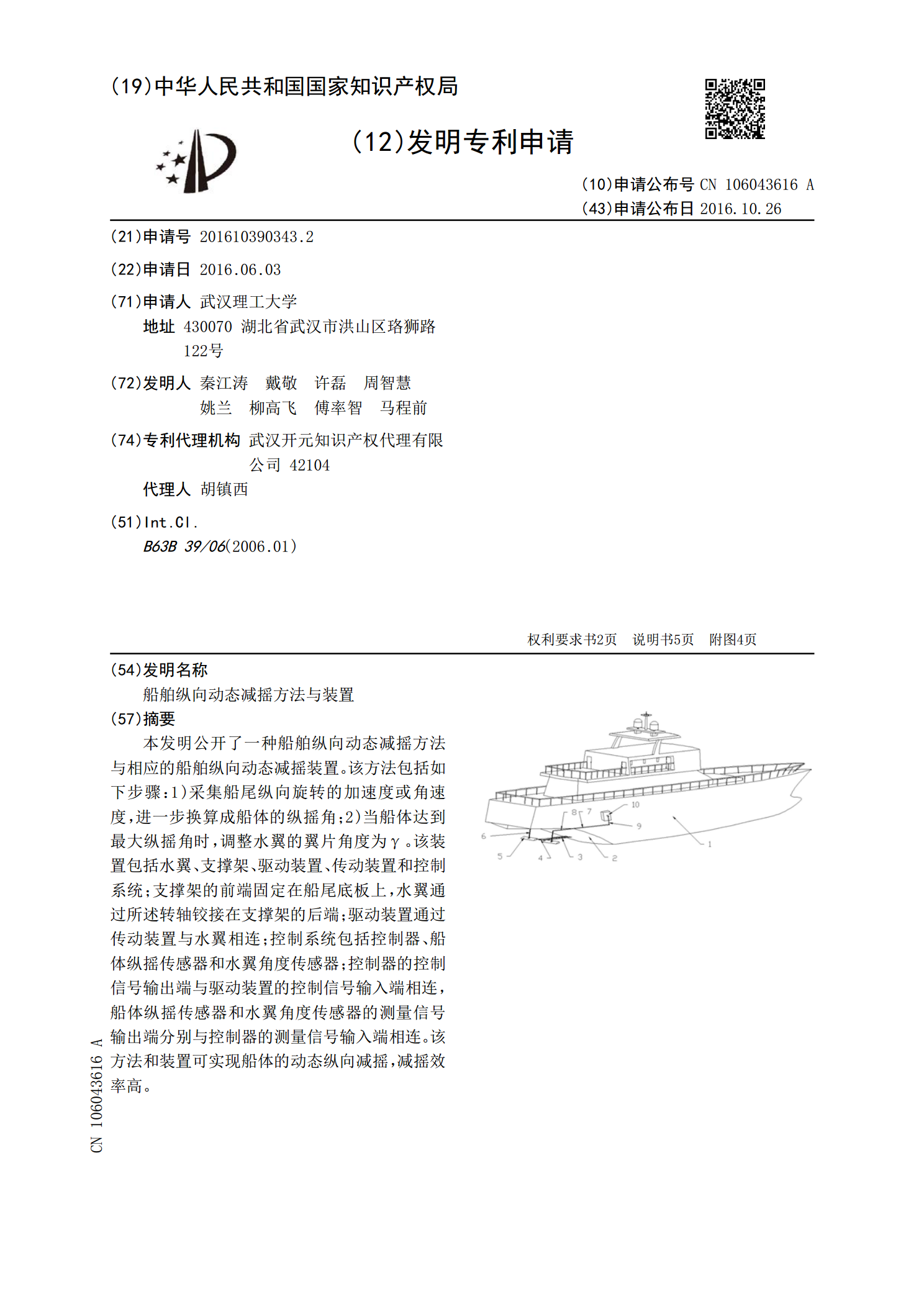
本发明公开了一种船舶纵向动态减摇方法与相应的船舶纵向动态减摇装置。该方法包括如下步骤:1)采集船尾纵向旋转的加速度或角速度,进一步换算成船体的纵摇角;2)当船体达到最大纵摇角时,调整水翼的翼片角度为γ。该装置包括水翼、支撑架、驱动装置、传动装置和控制系统;支撑架的前端固定在船尾底板上,水翼通过所述转轴铰接在支撑架的后端;驱动装置通过传动装置与水翼相连;控制系统包括控制器、船体纵摇传感器和水翼角度传感器;控制器的控制信号输出端与驱动装置的控制信号输入端相连,船体纵摇传感器和水翼角度传感器的测量信号输出端分别

动态船舶减摇器.pdf
本发明涉及动态船舶减摇器,原动机驱动主轴转动,主轴呈中空状,主轴转动式地装配于机座,主轴下端伸出机座之外,与转动盘的上部固接;沿主轴轴向内部穿伸传动轴,传动轴的上端伸出主轴之外与推力方向控制器相连,下部可转动地穿过转动盘的上部,并与处于转动盘内的中心齿轮固接,传动轴的下端与转动盘的下部转动配合;转动盘内转动配合数根桨叶轴,桨叶轴穿过桨叶齿轮的中部,两者固接而连动,桨叶齿轮通过传动件与中心齿轮相连;桨叶轴的下端伸出转动盘的下部,与桨叶的一端固接;转动盘转动一周,桨叶绕自身轴线旋转半周。本发明成对安装于船舶舭
减摇装置及船舶.pdf
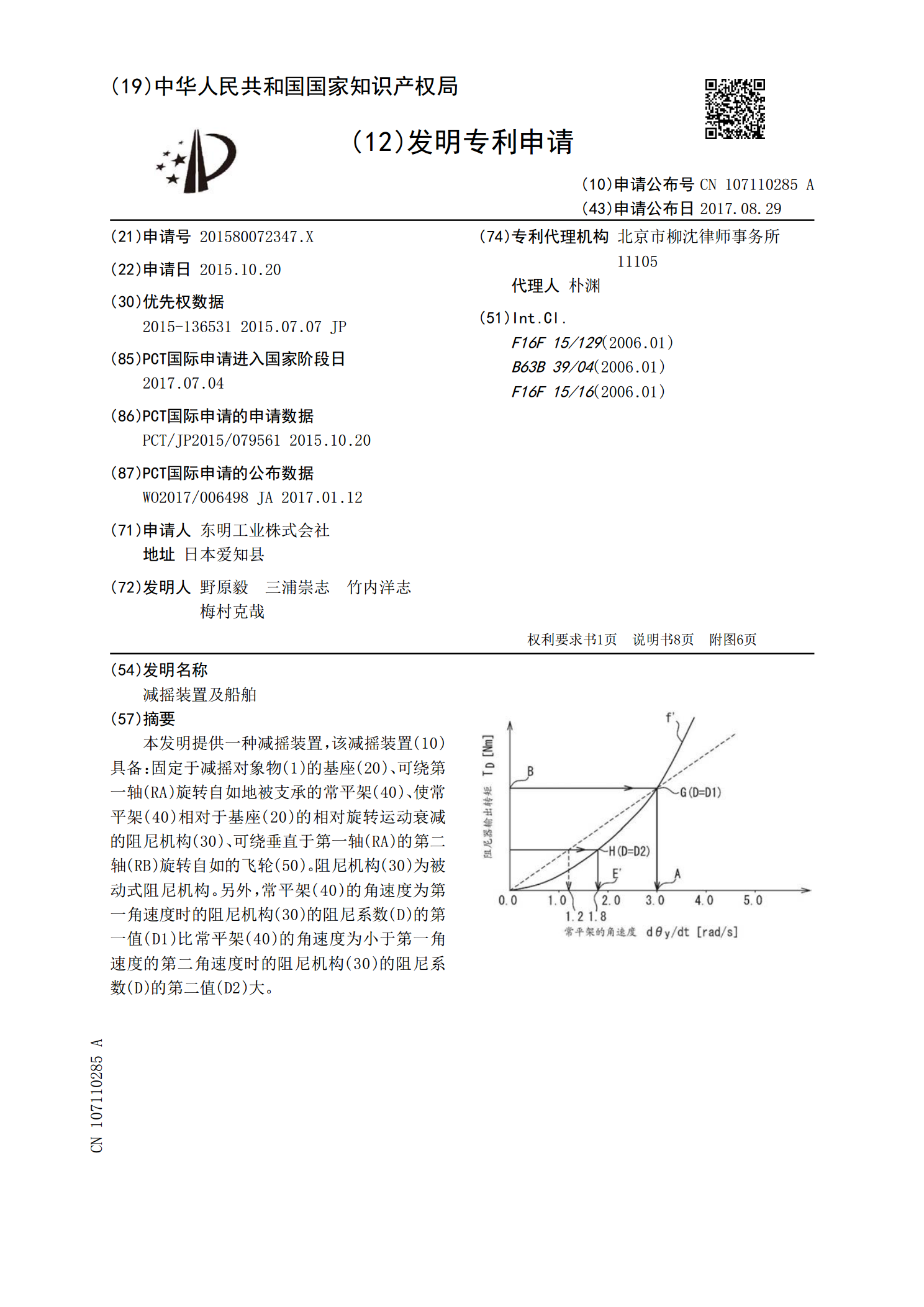
本发明提供一种减摇装置,该减摇装置(10)具备:固定于减摇对象物(1)的基座(20)、可绕第一轴(RA)旋转自如地被支承的常平架(40)、使常平架(40)相对于基座(20)的相对旋转运动衰减的阻尼机构(30)、可绕垂直于第一轴(RA)的第二轴(RB)旋转自如的飞轮(50)。阻尼机构(30)为被动式阻尼机构。另外,常平架(40)的角速度为第一角速度时的阻尼机构(30)的阻尼系数(D)的第一值(D1)比常平架(40)的角速度为小于第一角速度的第二角速度时的阻尼机构(30)的阻尼系数(D)的第二值(D2)大。

船舶动力减摇装置及减摇控制方法.pdf
本发明涉及一种船舶动力减摇装置及减摇控制方法,通过采集船舶姿态传感器横摇数据以及推进器推力反馈数据送推力分配控制单元,实时控制船舶侧向推进器、主推进器和舵桨,实现船舶的局部减摇功能。该策略适用于安装有艏部侧向推进器、艉部侧向推进器、全回转主推进器或者常规调距桨(含舵)的船舶。该策略无需借助减鳐鳍或者减摇水舱等专门减摇装置,是一种利用船舶推进装置本身实现局部减摇功能的新颖的减摇策略。

船舶减摇装置及其应用.docx
船舶减摇装置及其应用摇晃是海上航行中的一个常见问题,这会影响船舶的安全性、乘员的生产力以及船上设备的正常运作。对这个问题的解决,很长时间以来是人们一直试图探索的方向。此外,随着船舶行驶的速度不断提高,船舶发生摇晃的现象也越来越普遍。为了降低摇晃的危险性,船舶设计师们在这方面也不断的进行改进。其中的一项被广泛采用的技术是船舶减摇装置。本文将对船舶减摇装置及其应用进行深入的探讨。什么是船舶减摇装置?船舶减摇装置(Rollstabilizationdevice)是一种用于减缓船舶摇晃的技术,通常用于大型海上船舶