
一种机器人自动焊接栅格板控制装置及其工作方法.pdf

雨巷****彦峰


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机器人自动焊接栅格板控制装置及其工作方法.pdf
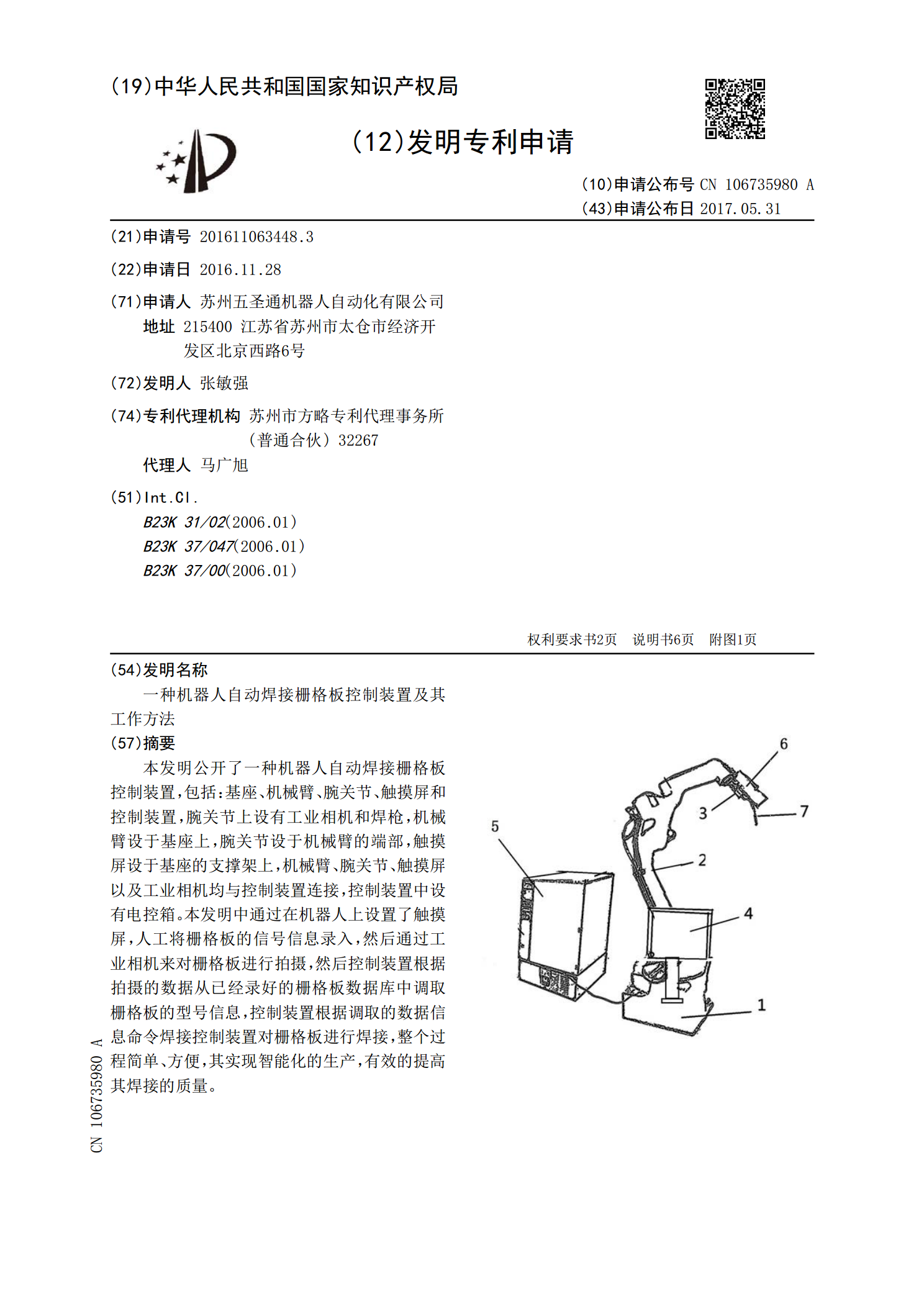
本发明公开了一种机器人自动焊接栅格板控制装置,包括:基座、机械臂、腕关节、触摸屏和控制装置,腕关节上设有工业相机和焊枪,机械臂设于基座上,腕关节设于机械臂的端部,触摸屏设于基座的支撑架上,机械臂、腕关节、触摸屏以及工业相机均与控制装置连接,控制装置中设有电控箱。本发明中通过在机器人上设置了触摸屏,人工将栅格板的信号信息录入,然后通过工业相机来对栅格板进行拍摄,然后控制装置根据拍摄的数据从已经录好的栅格板数据库中调取栅格板的型号信息,控制装置根据调取的数据信息命令焊接控制装置对栅格板进行焊接,整个过程简单、
一种用于栅格板焊接的浮动工装及其工作方法.pdf
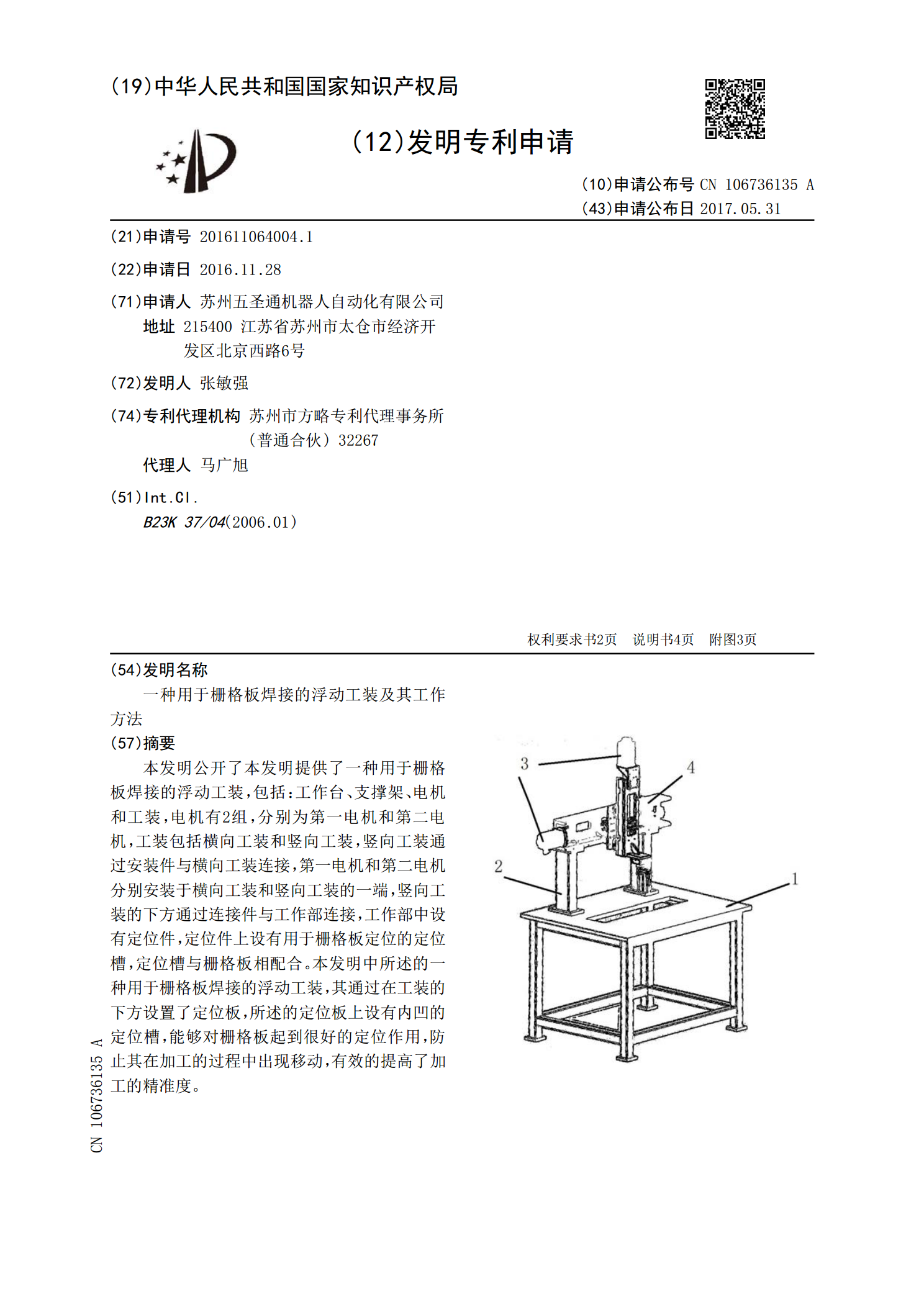
本发明公开了本发明提供了一种用于栅格板焊接的浮动工装,包括:工作台、支撑架、电机和工装,电机有2组,分别为第一电机和第二电机,工装包括横向工装和竖向工装,竖向工装通过安装件与横向工装连接,第一电机和第二电机分别安装于横向工装和竖向工装的一端,竖向工装的下方通过连接件与工作部连接,工作部中设有定位件,定位件上设有用于栅格板定位的定位槽,定位槽与栅格板相配合。本发明中所述的一种用于栅格板焊接的浮动工装,其通过在工装的下方设置了定位板,所述的定位板上设有内凹的定位槽,能够对栅格板起到很好的定位作用,防止其在加工

一种高精度机器人自动焊接装置及其工作方法.pdf
本发明公开了一种用于栅格板焊接的高精度机器人自动焊接装置,包括:基座、机械臂、腕关节、触摸屏和控制装置,腕关节上设有激光检测仪和焊枪,机械臂设于基座上,腕关节设于机械臂的端部,触摸屏设于基座的支撑架上,机械臂、腕关节、触摸屏以及激光检测仪均与控制装置连接,控制装置中设有电控箱,且,激光检测仪的检测范围大于等于栅格板所需焊接边的宽度。本发明中所述腕关节上设有安装基座,所述的安装基座呈倒的L型,所述安装基座上设有用于安装激光检测仪的第一安装孔和用于安装焊枪的第二安装孔,所述第一安装孔高于第二安装孔,避免焊枪焊

一种工件自动化焊接加工装置及其工作方法.pdf
一种工件自动化焊接加工装置,包括底座、控制系统、导轨、清枪器、滑座、控制器、安装台、调节机构、焊枪、视觉扫描机构和减震支腿,所述底座底部设有一组滑轮,所述底座顶端通过一组减震支腿设有导轨,所述导轨外壁套设有滑座,所述滑座顶部两端设有清枪器和控制器,所述控制器与所述控制系统电性连接,所述清枪器和控制器之间设有安装台,所述安装台顶部设有调节机构,所述调节机构端部连接焊枪和视觉扫描机构。本发明所述的工件自动化焊接加工装置及其工作方法,通过对实时检测到的翻转角度与预设角度进行比较,控制以交替切换的方式实现焊枪翻转

管板焊接机器人自动对正装置.pdf
本发明公开提供了一种管板焊接机器人自动对正装置。所述自动对正装置固定安装在管板焊接机器人的底部,该自动对正装置包含:机架、驱动脚轮、从动脚轮、升降支脚,驱动脚轮安装在机架底部一侧,从动脚轮、升降支脚安装在机架底部另一侧,构成三点支撑,驱动脚轮上的轮子旋转可带动架体围绕升降支脚旋转;升降支脚可上下升降,由管板焊接机器人测量焊枪的旋转轴与板面垂直度,经工控机计算并控制驱动脚轮的旋转角度及升降支脚的升降高度,达到自动对正焊枪的旋转轴与板面垂直。