
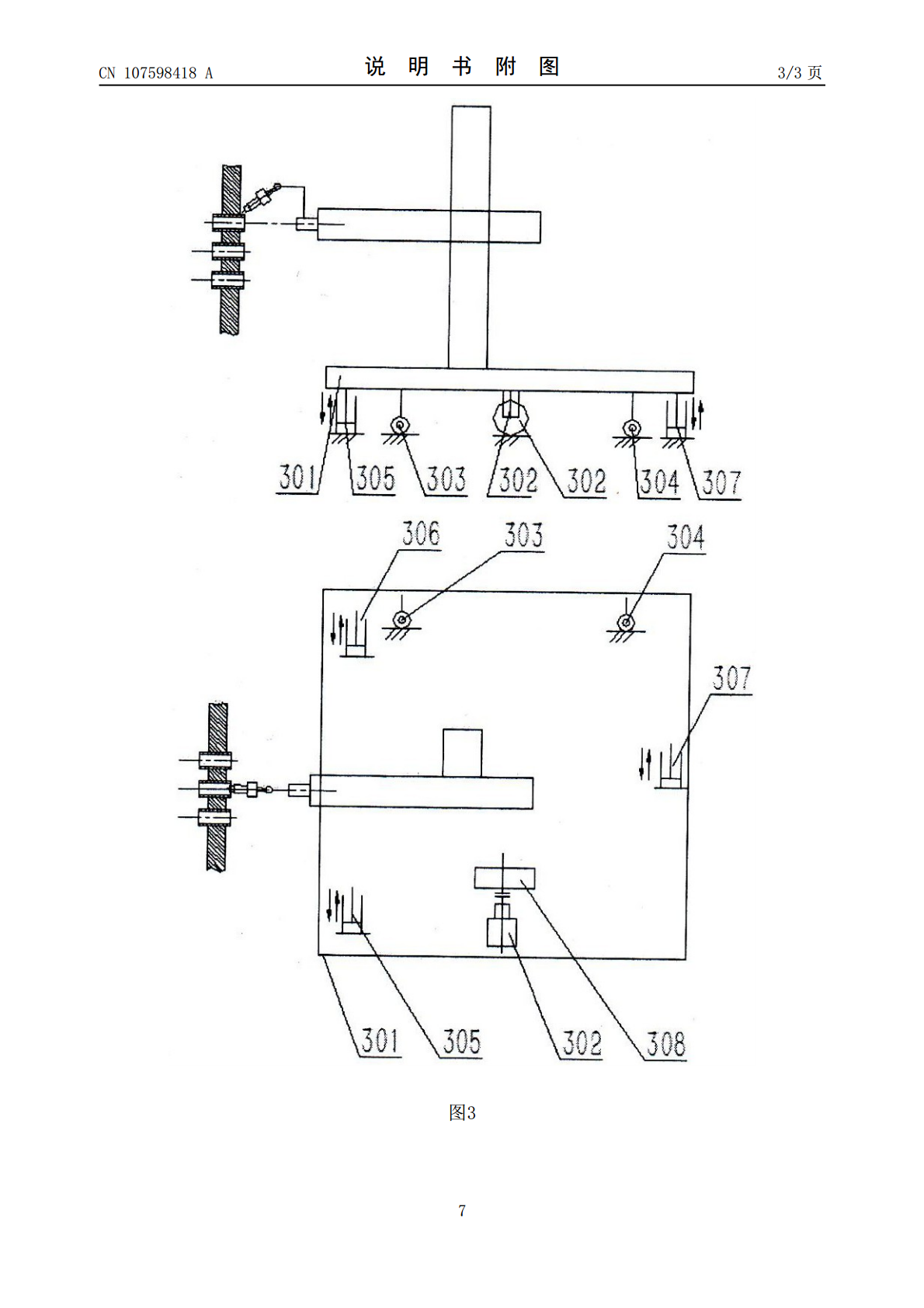
管板焊接机器人自动对正装置.pdf

Th****s3


1/7

2/7
3/7

4/7

5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

管板焊接机器人自动对正装置.pdf
本发明公开提供了一种管板焊接机器人自动对正装置。所述自动对正装置固定安装在管板焊接机器人的底部,该自动对正装置包含:机架、驱动脚轮、从动脚轮、升降支脚,驱动脚轮安装在机架底部一侧,从动脚轮、升降支脚安装在机架底部另一侧,构成三点支撑,驱动脚轮上的轮子旋转可带动架体围绕升降支脚旋转;升降支脚可上下升降,由管板焊接机器人测量焊枪的旋转轴与板面垂直度,经工控机计算并控制驱动脚轮的旋转角度及升降支脚的升降高度,达到自动对正焊枪的旋转轴与板面垂直。

一种全自动视觉定位管板焊接装置.pdf
本发明公开了一种全自动视觉定位管板焊接装置,属于焊接设备技术领域,包括机器人底座、工业机器人、定位治具、压力容器、定位焊接部件和控制部件,所述工业机器人安装在机器人底座上,所述定位治具设置在工业机器人的输出端处,所述定位焊接部件与定位治具可拆卸安装,所述压力容器设置在机器人底座的旁侧,在焊接状态下,所述定位焊接部件的焊接端压力容器的端部对接,所述工业机器人和定位焊接部件均与控制部件电性连接。本发明使用工业机器人通过离线编程技术对要焊接的孔位拍照点进行编程,实现了压力容器管板焊的自动化,整个过程由机器人完全
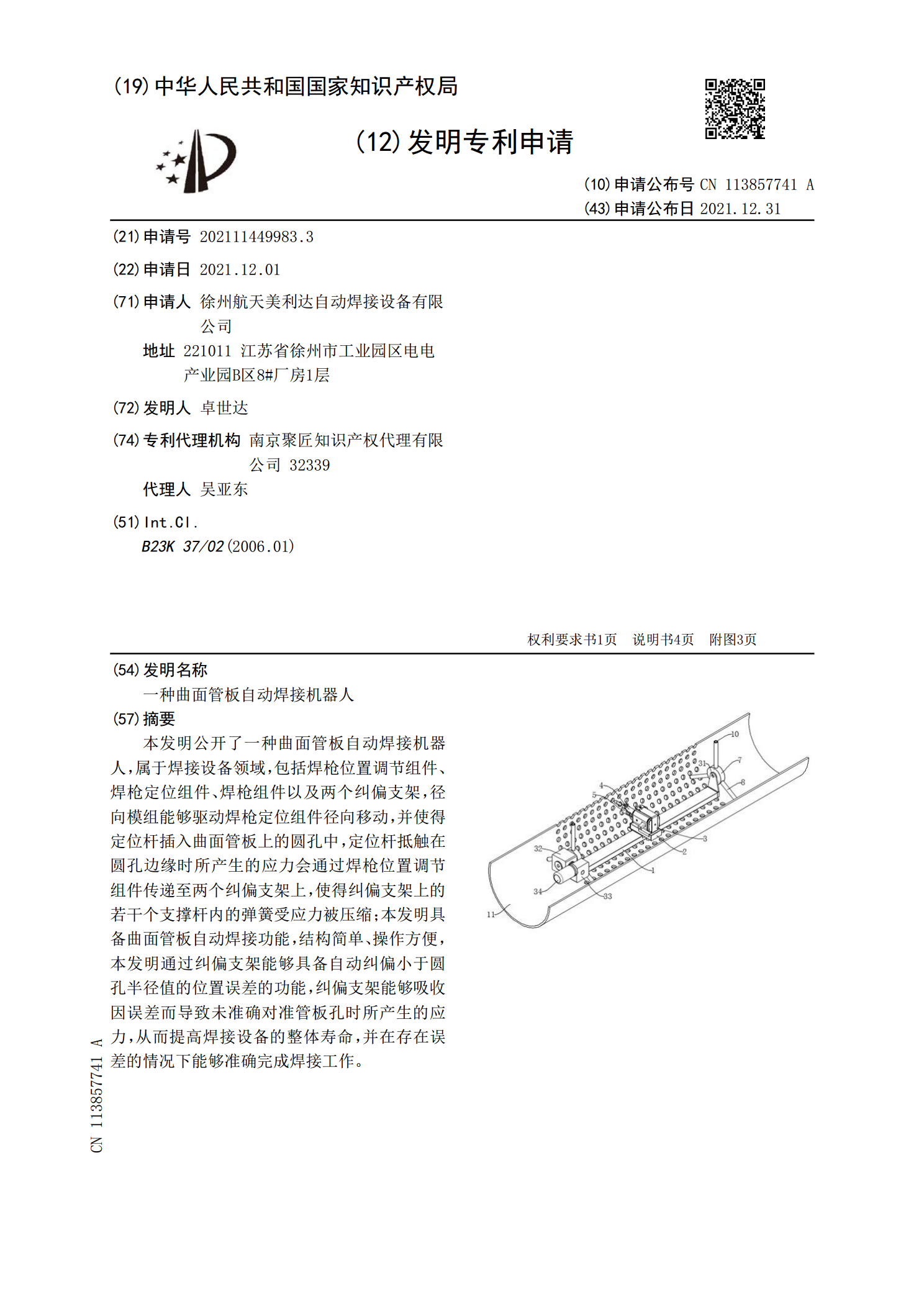
一种曲面管板自动焊接机器人.pdf
本发明公开了一种曲面管板自动焊接机器人,属于焊接设备领域,包括焊枪位置调节组件、焊枪定位组件、焊枪组件以及两个纠偏支架,径向模组能够驱动焊枪定位组件径向移动,并使得定位杆插入曲面管板上的圆孔中,定位杆抵触在圆孔边缘时所产生的应力会通过焊枪位置调节组件传递至两个纠偏支架上,使得纠偏支架上的若干个支撑杆内的弹簧受应力被压缩;本发明具备曲面管板自动焊接功能,结构简单、操作方便,本发明通过纠偏支架能够具备自动纠偏小于圆孔半径值的位置误差的功能,纠偏支架能够吸收因误差而导致未准确对准管板孔时所产生的应力,从而提高焊

钛制管板换热器的自动焊接技术.doc
文章来源:www.huanreqi828.com钛制管板换热器的自动焊接技术陈国余陈春阳庄杰昆山华恒焊接设备技术有限公司215301摘要:本文结合钛制换热器的管板焊接特点,着重介绍该类换热器自动焊时需要解决的几个问题,即气体保护装置、送丝系统和水冷定位器,从而保证管板焊接质量。关键词:钛及其合金管板自动焊保护送丝水冷定位前言钛及其合金由于其比强度高,早期大量地使用在航空、航天等尖端领域。然而随着石油、化工行业近些年的飞速发展,由于钛及其合金优越的耐蚀性能,在氧化性、中性及氯离子介质中,其耐蚀性能均优于不锈
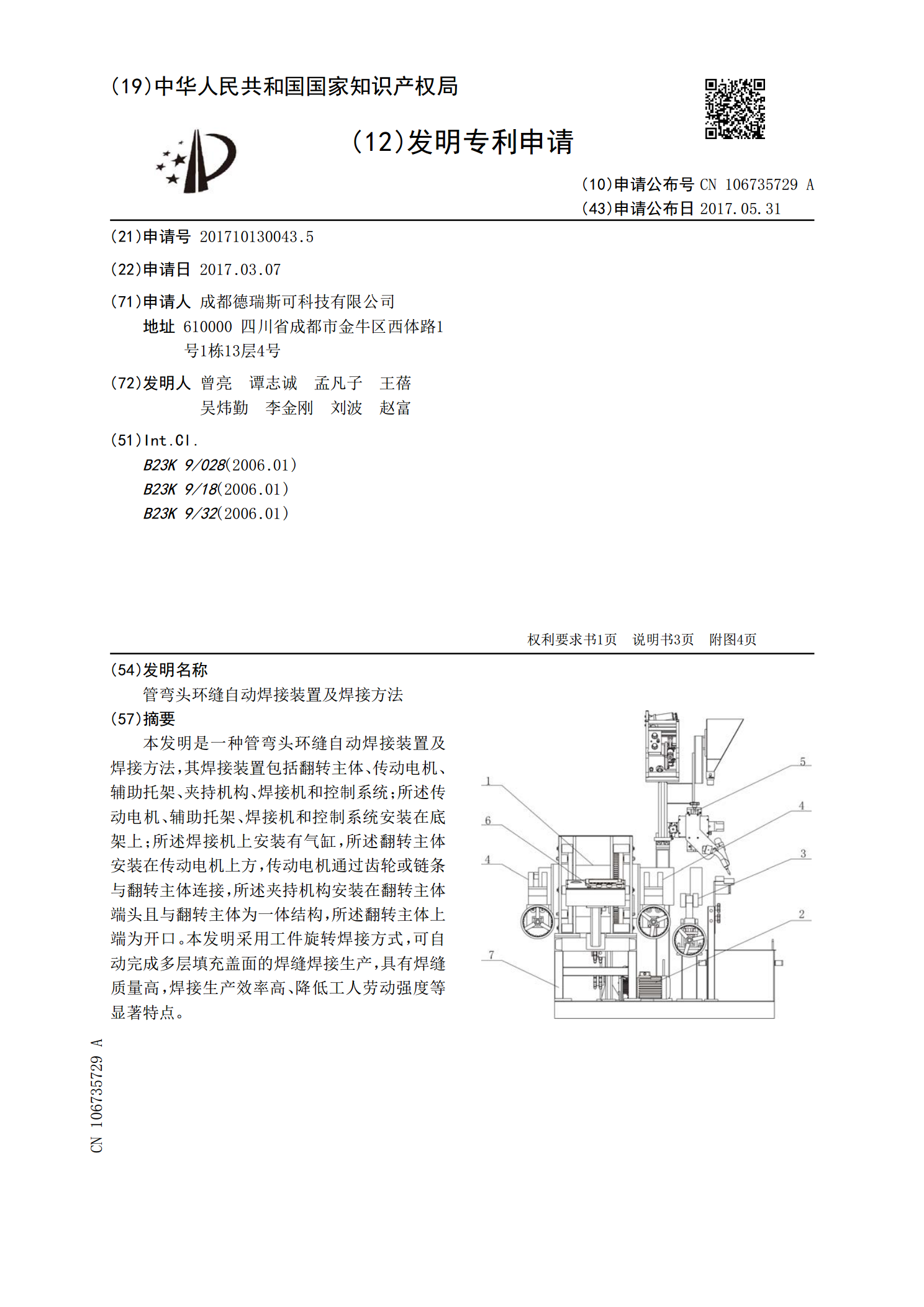
管弯头环缝自动焊接装置及焊接方法.pdf
本发明是一种管弯头环缝自动焊接装置及焊接方法,其焊接装置包括翻转主体、传动电机、辅助托架、夹持机构、焊接机和控制系统;所述传动电机、辅助托架、焊接机和控制系统安装在底架上;所述焊接机上安装有气缸,所述翻转主体安装在传动电机上方,传动电机通过齿轮或链条与翻转主体连接,所述夹持机构安装在翻转主体端头且与翻转主体为一体结构,所述翻转主体上端为开口。本发明采用工件旋转焊接方式,可自动完成多层填充盖面的焊缝焊接生产,具有焊缝质量高,焊接生产效率高、降低工人劳动强度等显著特点。