
一种智能机械手夹紧装置.pdf

依波****bc

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种智能机械手夹紧装置.pdf
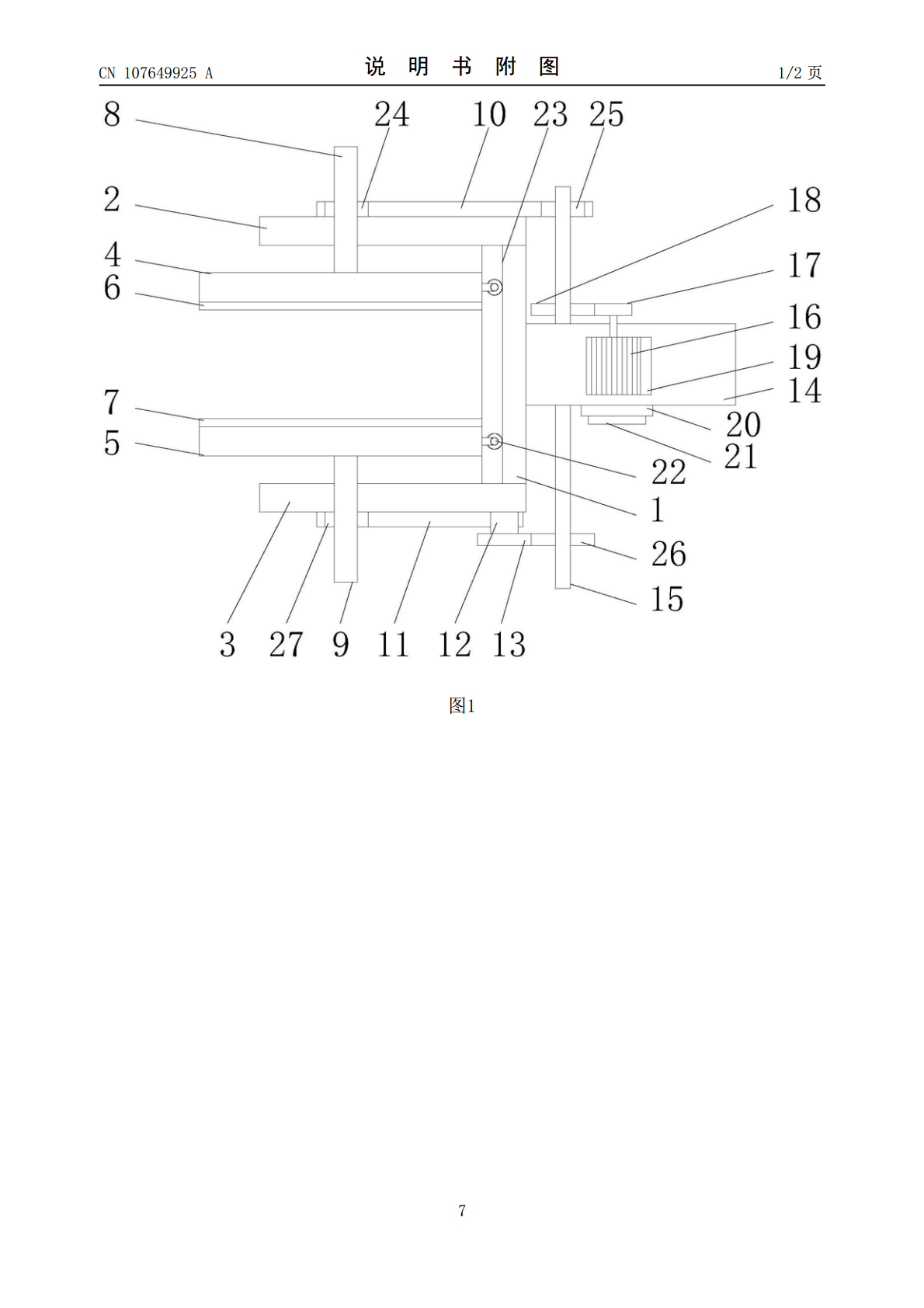
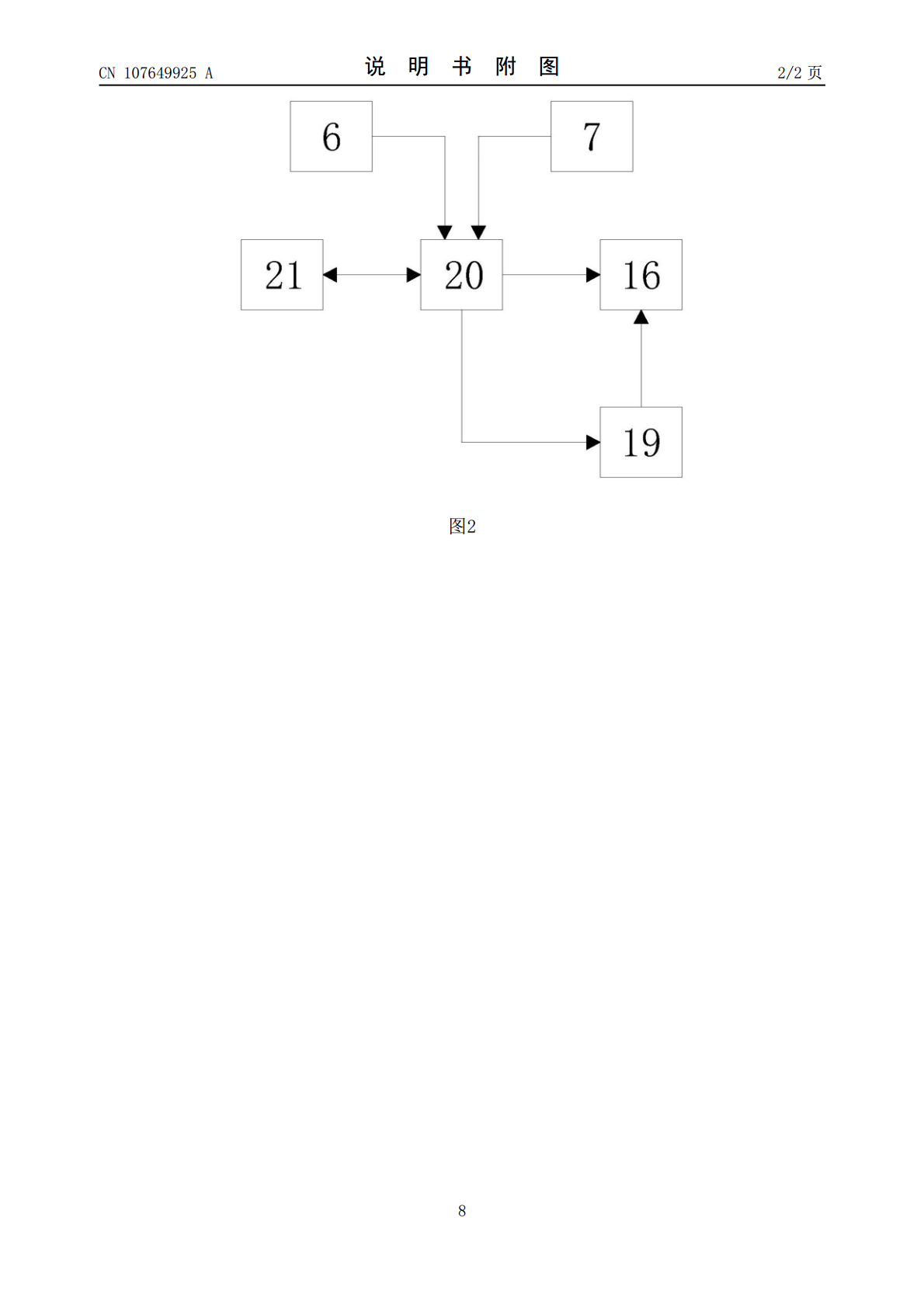
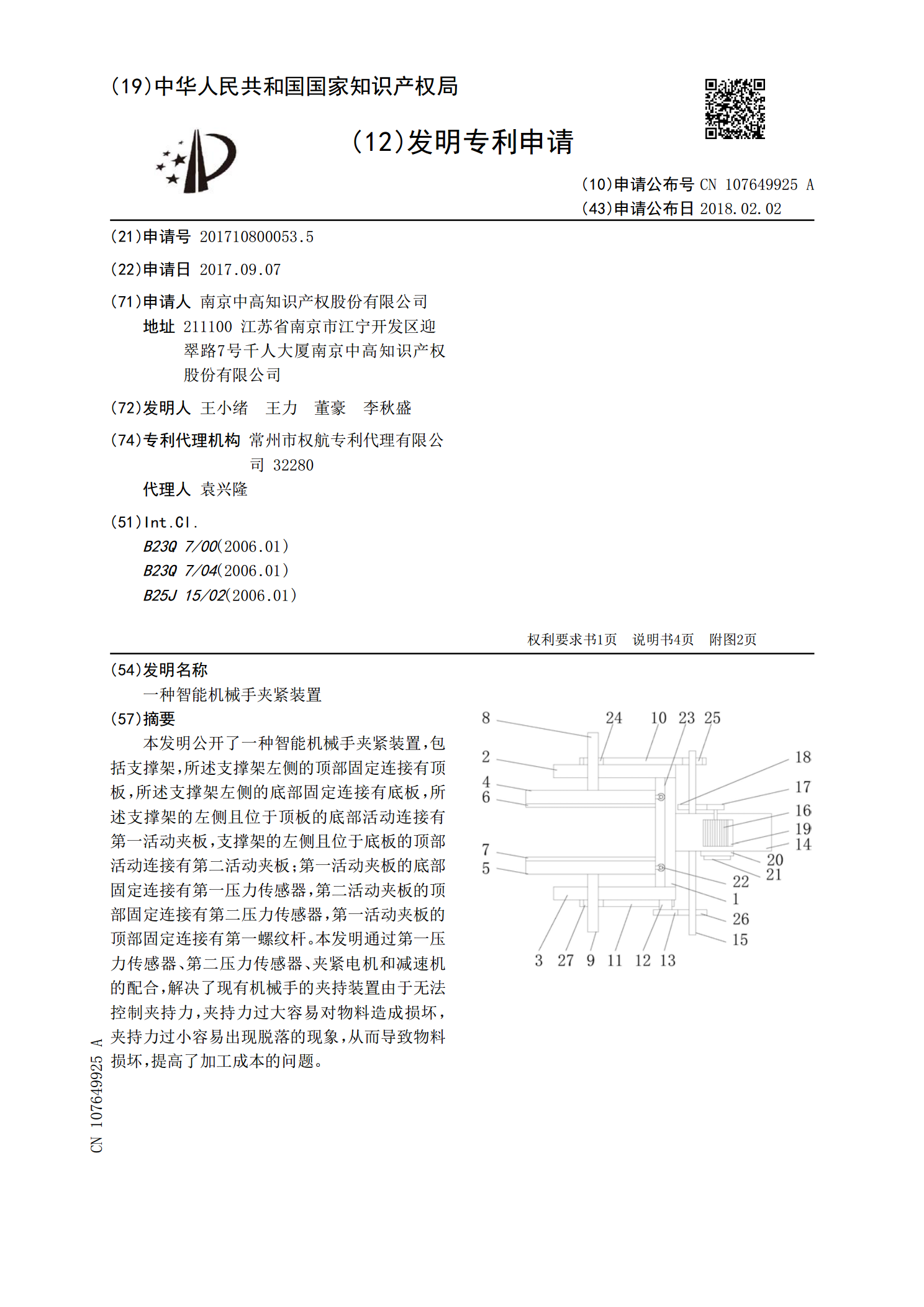
本发明公开了一种智能机械手夹紧装置,包括支撑架,所述支撑架左侧的顶部固定连接有顶板,所述支撑架左侧的底部固定连接有底板,所述支撑架的左侧且位于顶板的底部活动连接有第一活动夹板,支撑架的左侧且位于底板的顶部活动连接有第二活动夹板;第一活动夹板的底部固定连接有第一压力传感器,第二活动夹板的顶部固定连接有第二压力传感器,第一活动夹板的顶部固定连接有第一螺纹杆。本发明通过第一压力传感器、第二压力传感器、夹紧电机和减速机的配合,解决了现有机械手的夹持装置由于无法控制夹持力,夹持力过大容易对物料造成损坏,夹持力过小容
一种智能圆柱工件夹紧装置.pdf
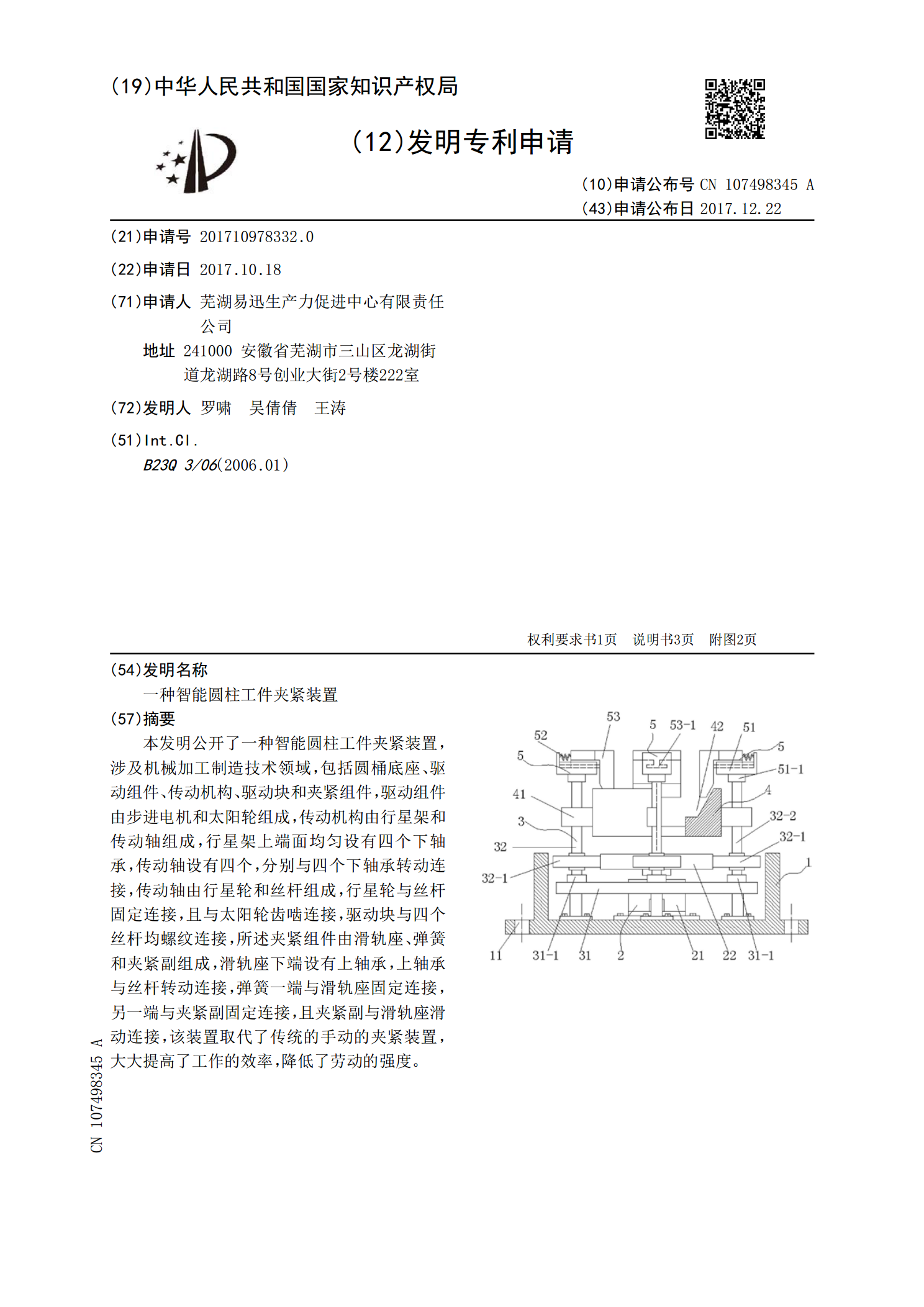
本发明公开了一种智能圆柱工件夹紧装置,涉及机械加工制造技术领域,包括圆桶底座、驱动组件、传动机构、驱动块和夹紧组件,驱动组件由步进电机和太阳轮组成,传动机构由行星架和传动轴组成,行星架上端面均匀设有四个下轴承,传动轴设有四个,分别与四个下轴承转动连接,传动轴由行星轮和丝杆组成,行星轮与丝杆固定连接,且与太阳轮齿啮连接,驱动块与四个丝杆均螺纹连接,所述夹紧组件由滑轨座、弹簧和夹紧副组成,滑轨座下端设有上轴承,上轴承与丝杆转动连接,弹簧一端与滑轨座固定连接,另一端与夹紧副固定连接,且夹紧副与滑轨座滑动连接,该
一种自动化机械手用夹紧装置.pdf
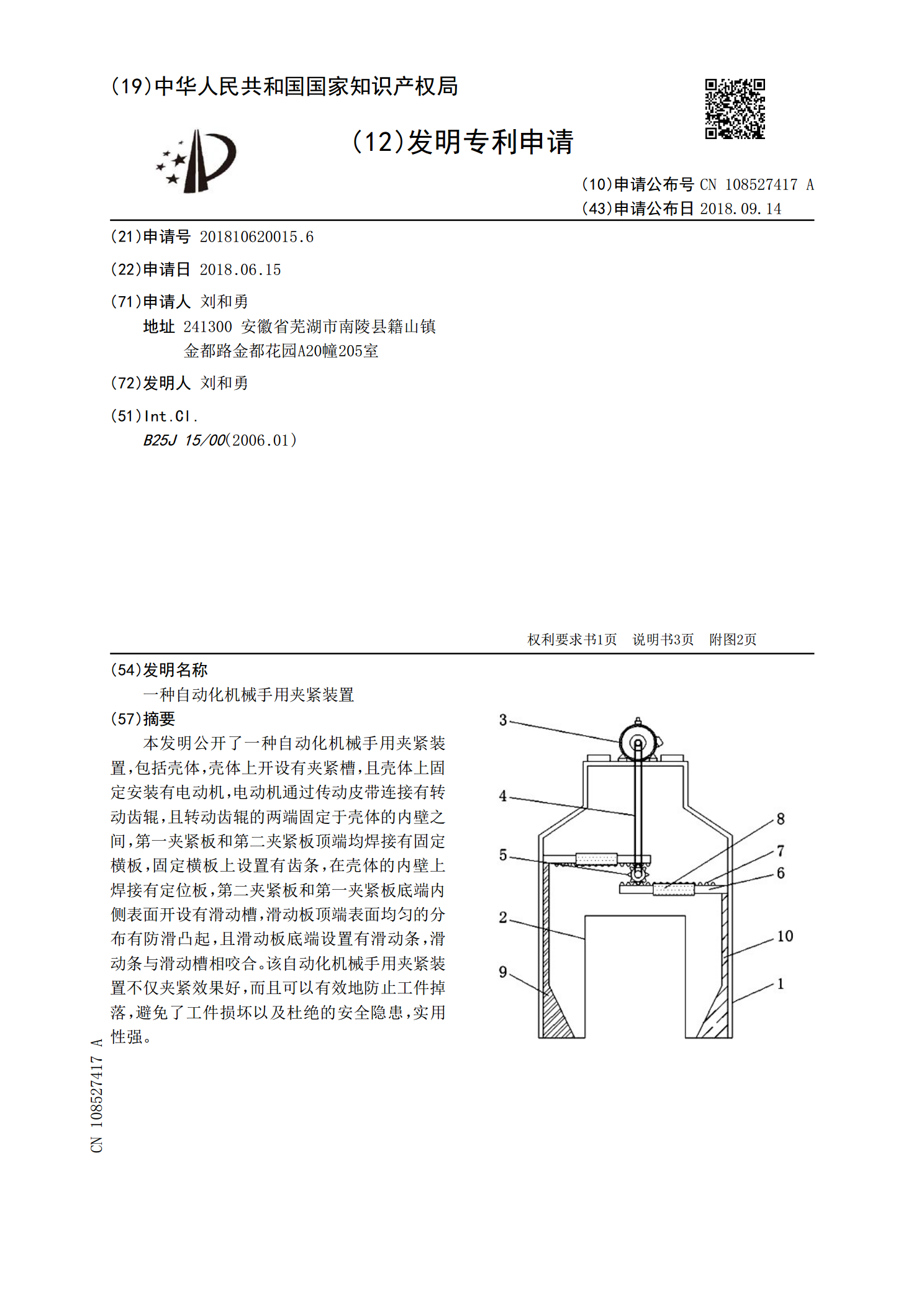
本发明公开了一种自动化机械手用夹紧装置,包括壳体,壳体上开设有夹紧槽,且壳体上固定安装有电动机,电动机通过传动皮带连接有转动齿辊,且转动齿辊的两端固定于壳体的内壁之间,第一夹紧板和第二夹紧板顶端均焊接有固定横板,固定横板上设置有齿条,在壳体的内壁上焊接有定位板,第二夹紧板和第一夹紧板底端内侧表面开设有滑动槽,滑动板顶端表面均匀的分布有防滑凸起,且滑动板底端设置有滑动条,滑动条与滑动槽相咬合。该自动化机械手用夹紧装置不仅夹紧效果好,而且可以有效地防止工件掉落,避免了工件损坏以及杜绝的安全隐患,实用性强。
用于码垛机械手的夹紧装置.pdf
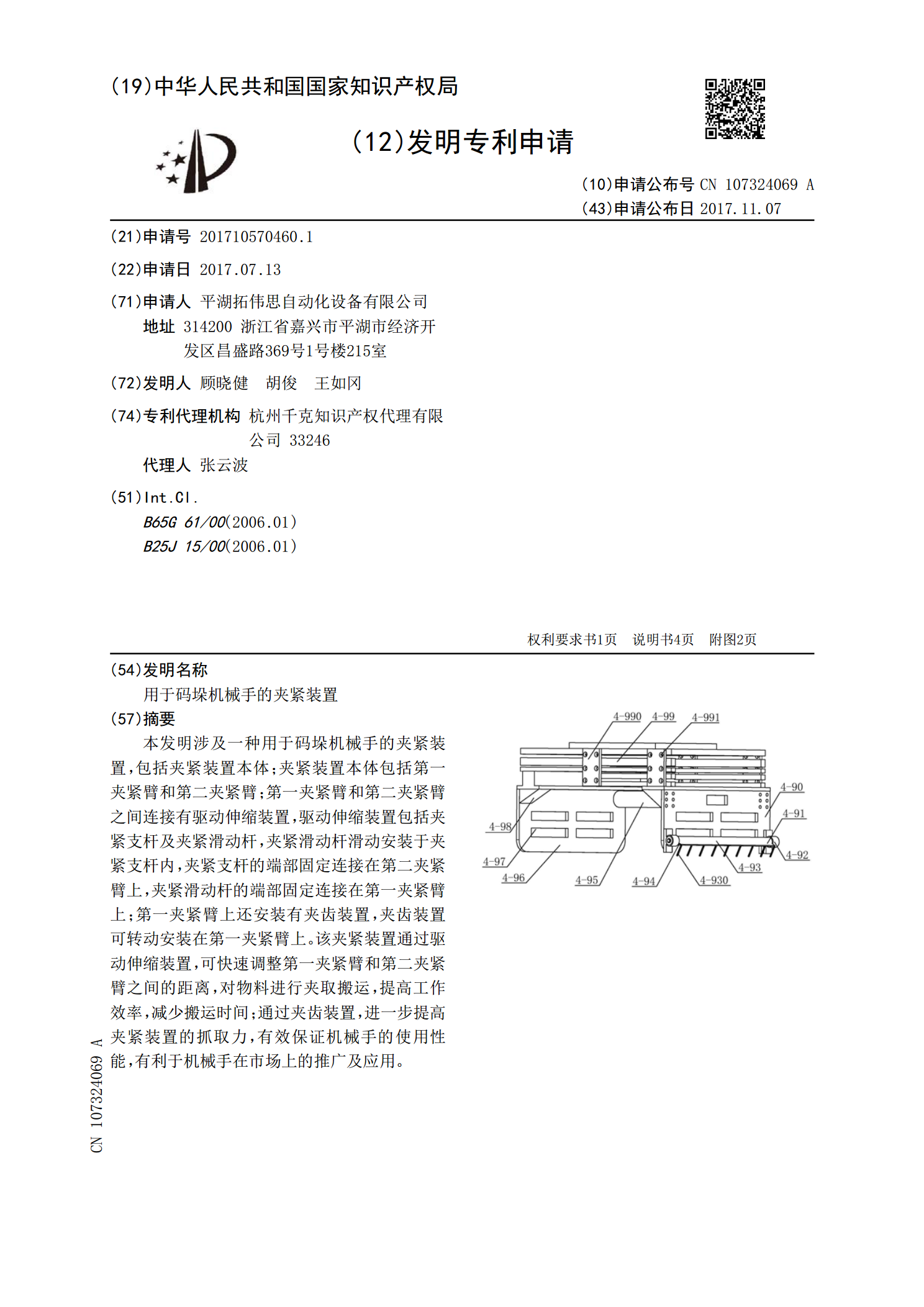
本发明涉及一种用于码垛机械手的夹紧装置,包括夹紧装置本体;夹紧装置本体包括第一夹紧臂和第二夹紧臂;第一夹紧臂和第二夹紧臂之间连接有驱动伸缩装置,驱动伸缩装置包括夹紧支杆及夹紧滑动杆,夹紧滑动杆滑动安装于夹紧支杆内,夹紧支杆的端部固定连接在第二夹紧臂上,夹紧滑动杆的端部固定连接在第一夹紧臂上;第一夹紧臂上还安装有夹齿装置,夹齿装置可转动安装在第一夹紧臂上。该夹紧装置通过驱动伸缩装置,可快速调整第一夹紧臂和第二夹紧臂之间的距离,对物料进行夹取搬运,提高工作效率,减少搬运时间;通过夹齿装置,进一步提高夹紧装置的

一种智能数控机床夹紧装置.pdf
一种智能数控机床夹紧装置,整个装置包括有一旋转主轴、夹头、皮带轮及一活塞汽缸,其中旋转主轴包括头部和躯干部,其中躯干部前段活动连接一主轴套筒并定位于床头的安装孔中;主轴躯干部中段安装所述的皮带轮;主轴躯干部后段连接所述的活塞汽缸;所述旋转主轴内孔为直通孔,其前端开口安装夹头,夹头后部连接一拉管,拉管向后延伸伸出主轴内孔并伸入到活塞汽缸,拉管末端连接设置一斜度盘;所述旋转主轴末端上螺纹连接设置有三爪结构可与斜度盘形成动配合。本发明在结构上采用机电一体化设计,制造成本低,夹头夹紧具有方便、实用、快捷、省力的特