
一种托盘堆叠输送装置的控制方法.pdf

Th****s3


1/9
2/9

3/9

4/9

5/9

6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种托盘堆叠输送装置的控制方法.pdf
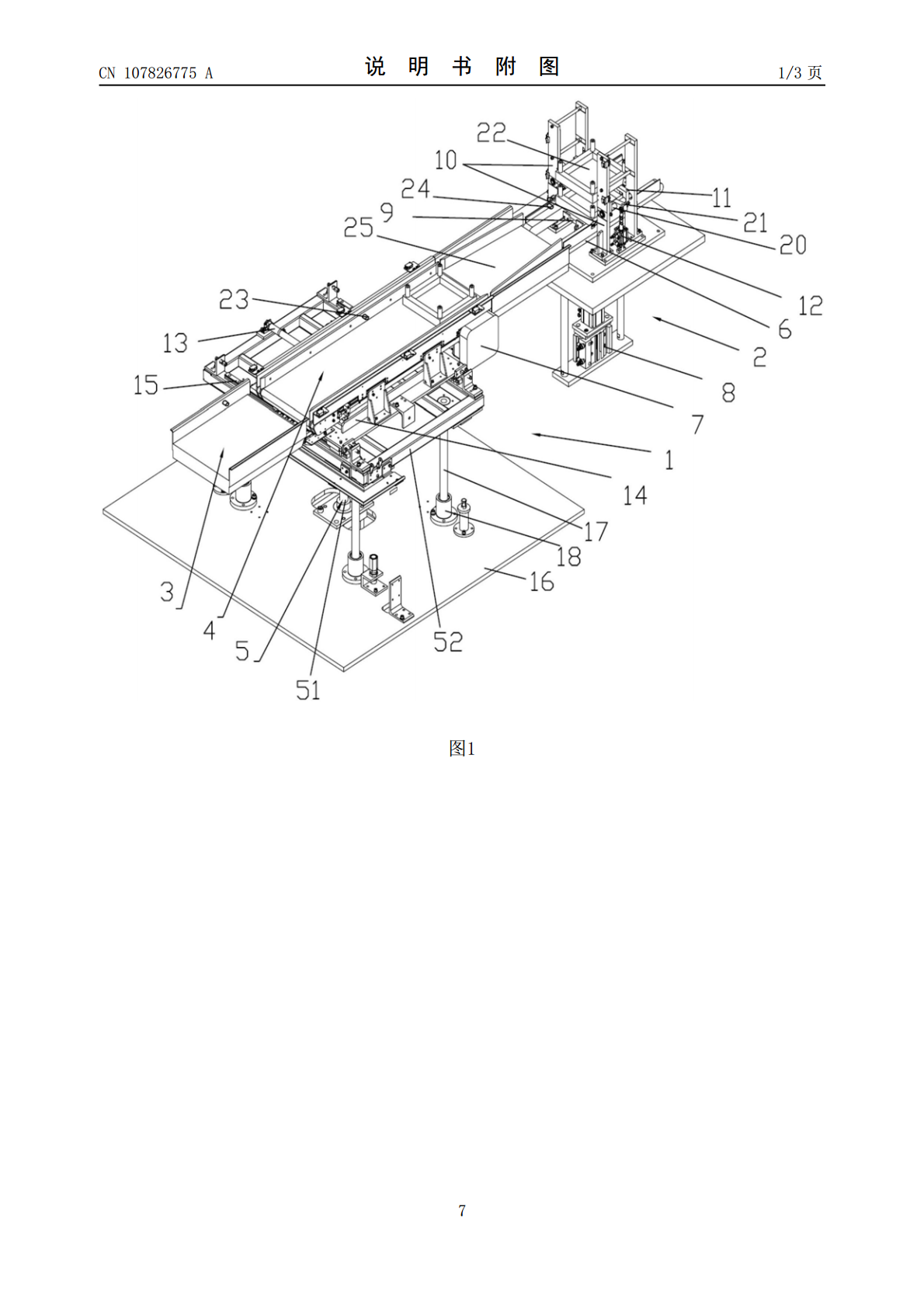
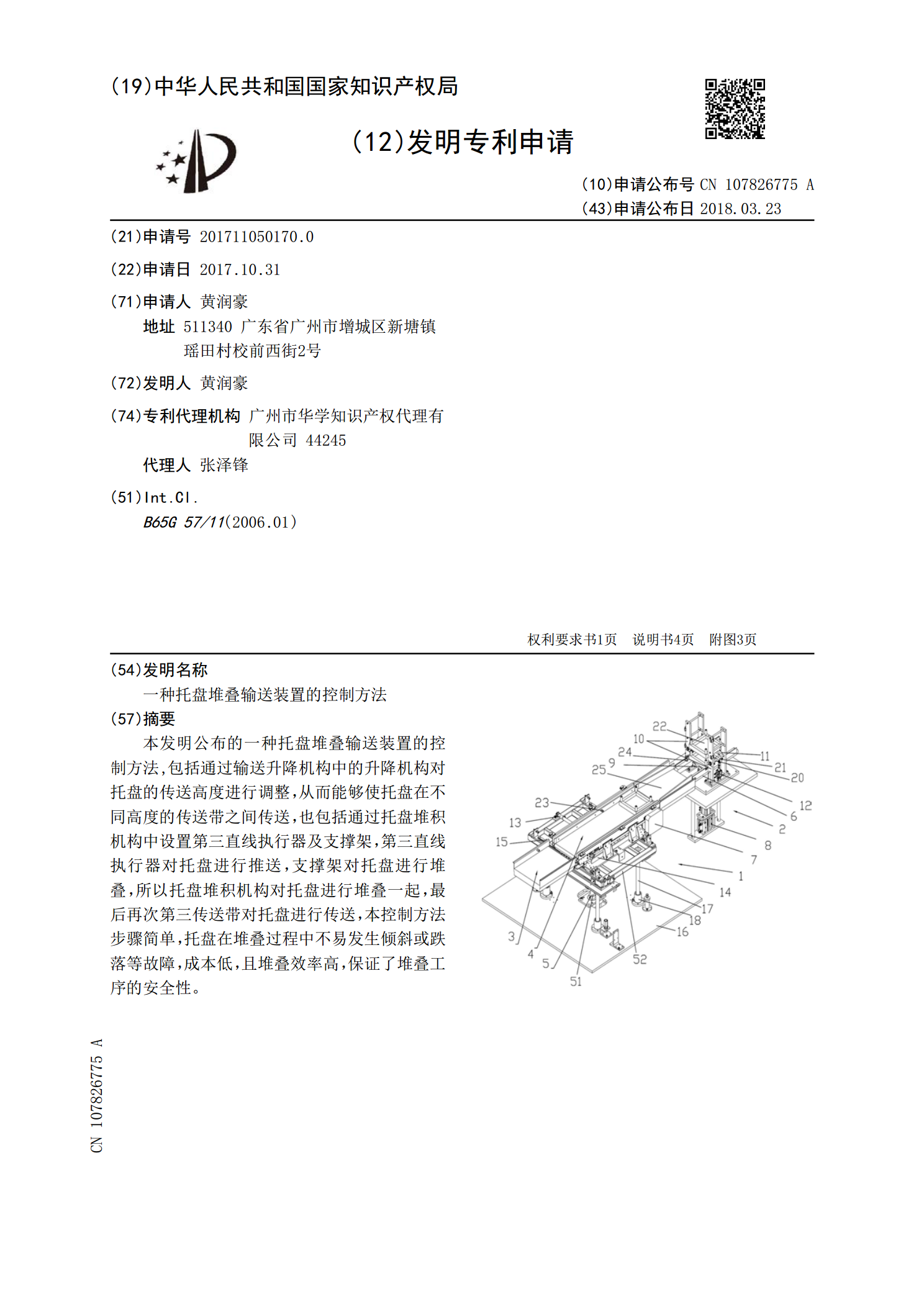
本发明公布的一种托盘堆叠输送装置的控制方法,包括通过输送升降机构中的升降机构对托盘的传送高度进行调整,从而能够使托盘在不同高度的传送带之间传送,也包括通过托盘堆积机构中设置第三直线执行器及支撑架,第三直线执行器对托盘进行推送,支撑架对托盘进行堆叠,所以托盘堆积机构对托盘进行堆叠一起,最后再次第三传送带对托盘进行传送,本控制方法步骤简单,托盘在堆叠过程中不易发生倾斜或跌落等故障,成本低,且堆叠效率高,保证了堆叠工序的安全性。
托盘堆叠输送装置.pdf
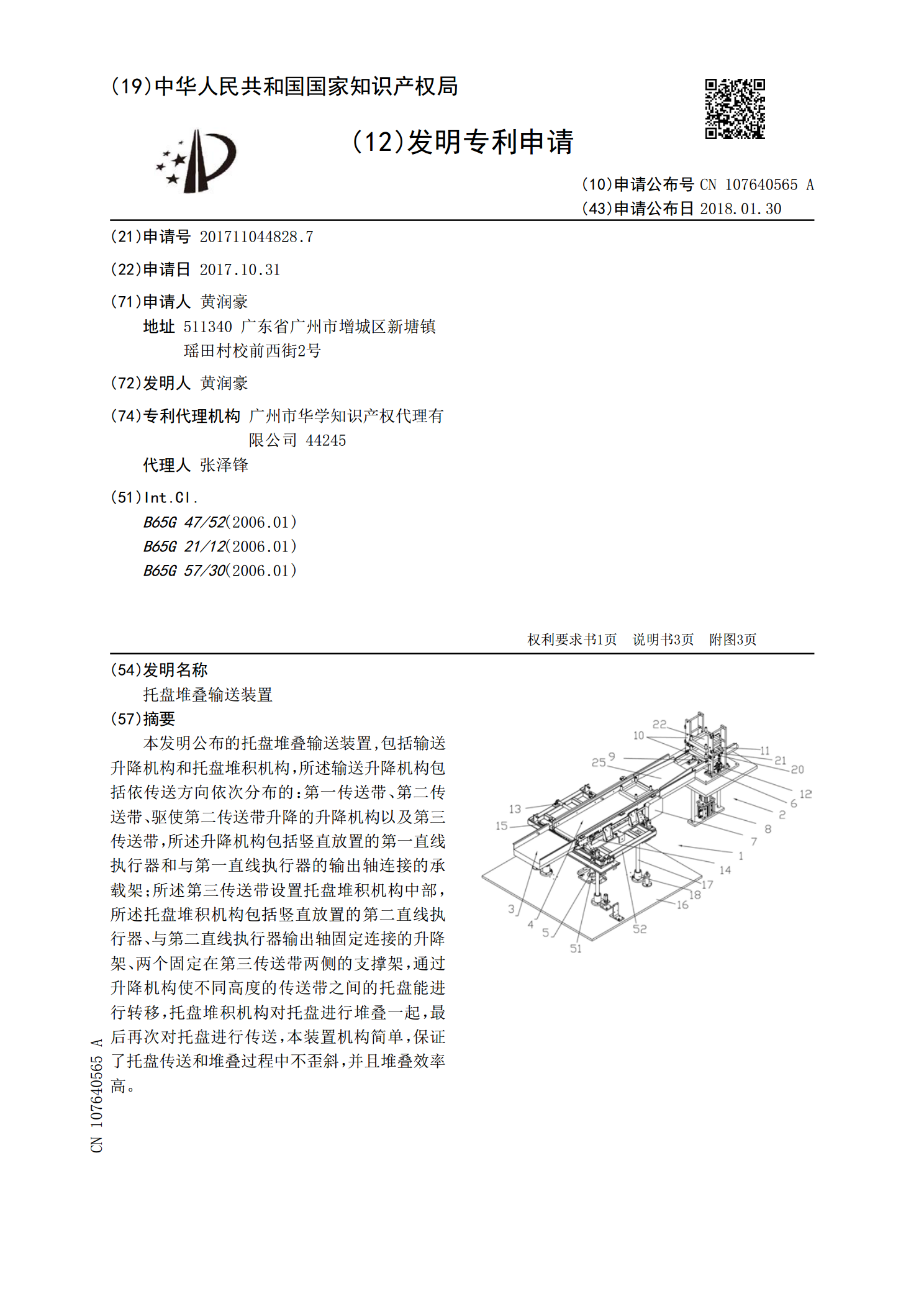
本发明公布的托盘堆叠输送装置,包括输送升降机构和托盘堆积机构,所述输送升降机构包括依传送方向依次分布的:第一传送带、第二传送带、驱使第二传送带升降的升降机构以及第三传送带,所述升降机构包括竖直放置的第一直线执行器和与第一直线执行器的输出轴连接的承载架;所述第三传送带设置托盘堆积机构中部,所述托盘堆积机构包括竖直放置的第二直线执行器、与第二直线执行器输出轴固定连接的升降架、两个固定在第三传送带两侧的支撑架,通过升降机构使不同高度的传送带之间的托盘能进行转移,托盘堆积机构对托盘进行堆叠一起,最后再次对托盘进行

托盘输送装置以及托盘输送方法.pdf
本发明提供一种托盘输送装置以及托盘输送方法,能够不增加托盘,即使是比较长的距离也能够快速且稳定地输送托盘。该托盘输送装置具备:托盘导轨(16),其搭载能够沿长度方向移动的托盘(21);第一及第二滑轮(23、24),它们在托盘导轨(16)的长度方向上分开设置;循环带(27),其架设在第一及第二滑轮(23、24)上,将搭载于托盘导轨(16)的托盘(21)卡止;第一促动器(28),其旋转驱动第一滑轮(23);第二促动器(29),其构成为能够与第一促动器(28)同步控制来旋转驱动第二滑轮(24)。托盘输送方法通过
托盘输送装置和托盘输送方法.pdf
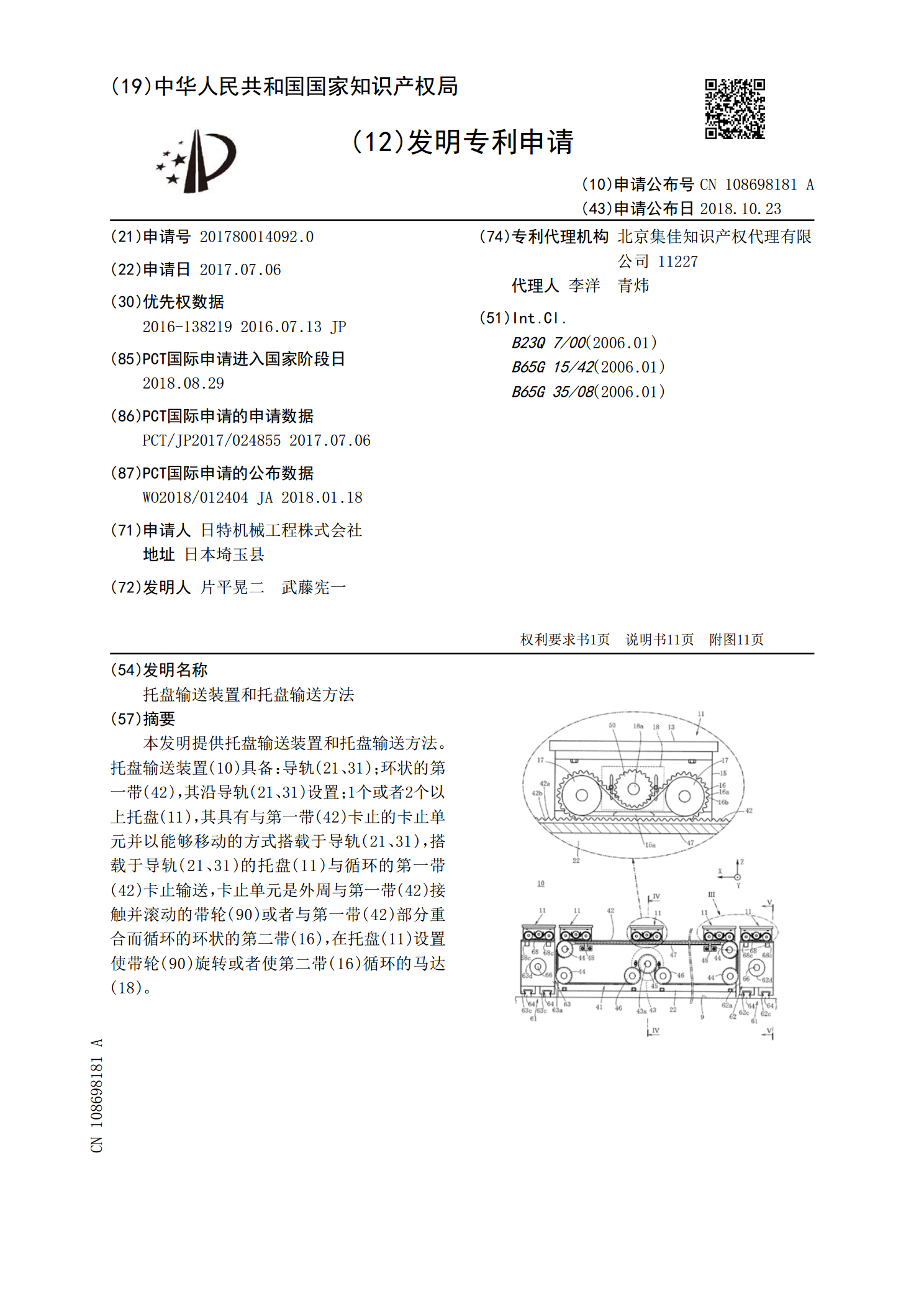
本发明提供托盘输送装置和托盘输送方法。托盘输送装置(10)具备:导轨(21、31);环状的第一带(42),其沿导轨(21、31)设置;1个或者2个以上托盘(11),其具有与第一带(42)卡止的卡止单元并以能够移动的方式搭载于导轨(21、31),搭载于导轨(21、31)的托盘(11)与循环的第一带(42)卡止输送,卡止单元是外周与第一带(42)接触并滚动的带轮(90)或者与第一带(42)部分重合而循环的环状的第二带(16),在托盘(11)设置使带轮(90)旋转或者使第二带(16)循环的马达(18)。

托盘输送装置和托盘输送方法.pdf
本发明提供一种托盘输送装置和托盘输送方法,能够容易地改变输送间距并且不增加驱动单元就能够容易地延长输送路线。该托盘输送装置具备:托盘导轨(22、42),搭载能够沿着长度方向移动的托盘(11);至少一个旋转滑轮(27、47、61),在托盘导轨的长度方向隔开规定的间隔设置;多条循环带(23、24、43、44),构成为能够卡止托盘,且经由旋转滑轮在托盘导轨的长度方向上依次连结设置;驱动单元(26),构成为能够使旋转滑轮之中的至少一个旋转滑轮(27)旋转。托盘输送方法为:经由旋转滑轮将多条循环带沿托盘导轨的长度方