
一种数控无极变径辊及其变径方法.pdf

一吃****春艳

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种数控无极变径辊及其变径方法.pdf
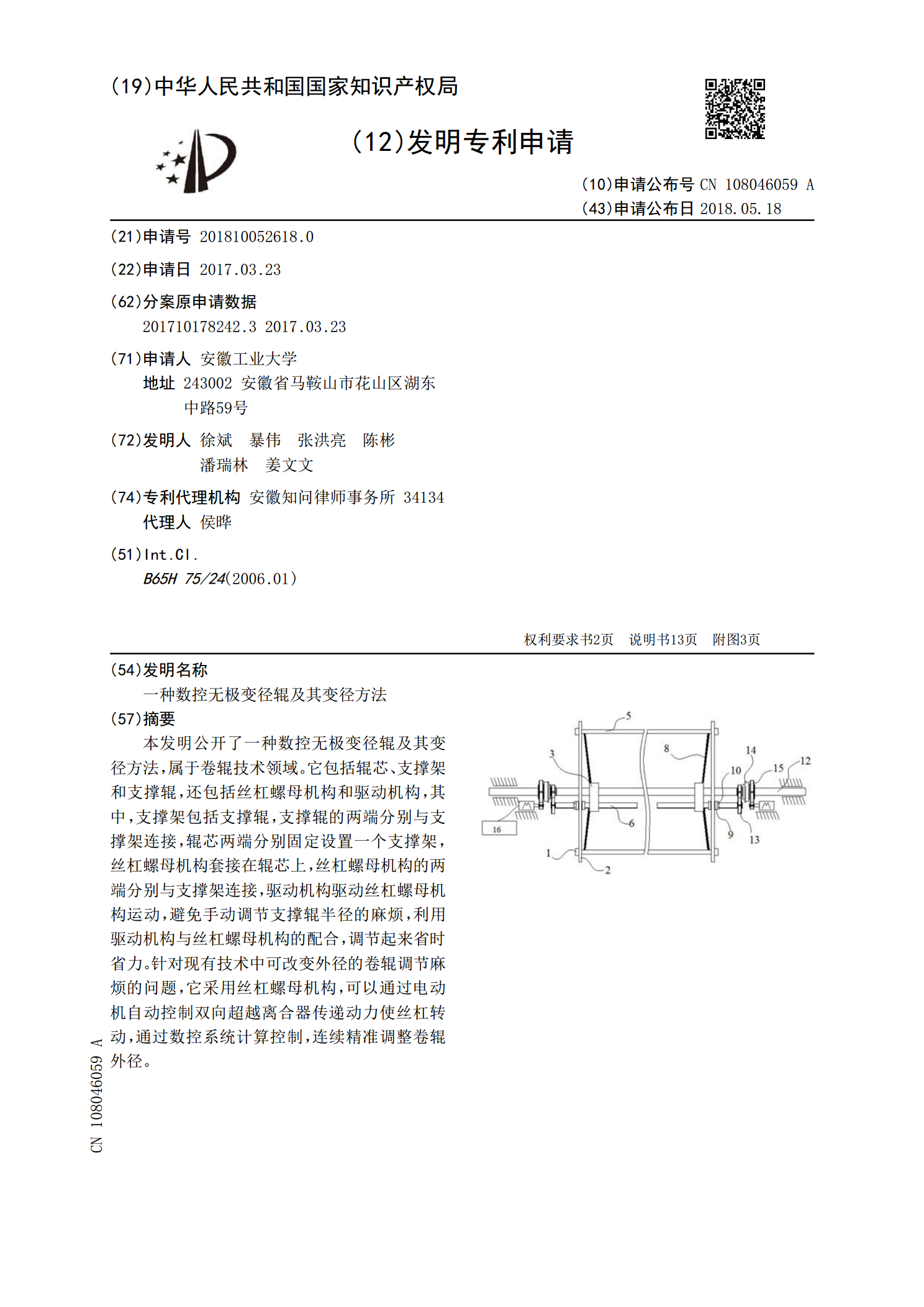
本发明公开了一种数控无极变径辊及其变径方法,属于卷辊技术领域。它包括辊芯、支撑架和支撑辊,还包括丝杠螺母机构和驱动机构,其中,支撑架包括支撑辊,支撑辊的两端分别与支撑架连接,辊芯两端分别固定设置一个支撑架,丝杠螺母机构套接在辊芯上,丝杠螺母机构的两端分别与支撑架连接,驱动机构驱动丝杠螺母机构运动,避免手动调节支撑辊半径的麻烦,利用驱动机构与丝杠螺母机构的配合,调节起来省时省力。针对现有技术中可改变外径的卷辊调节麻烦的问题,它采用丝杠螺母机构,可以通过电动机自动控制双向超越离合器传递动力使丝杠转动,通过数控
一种无极变径辊及其变径方法.pdf
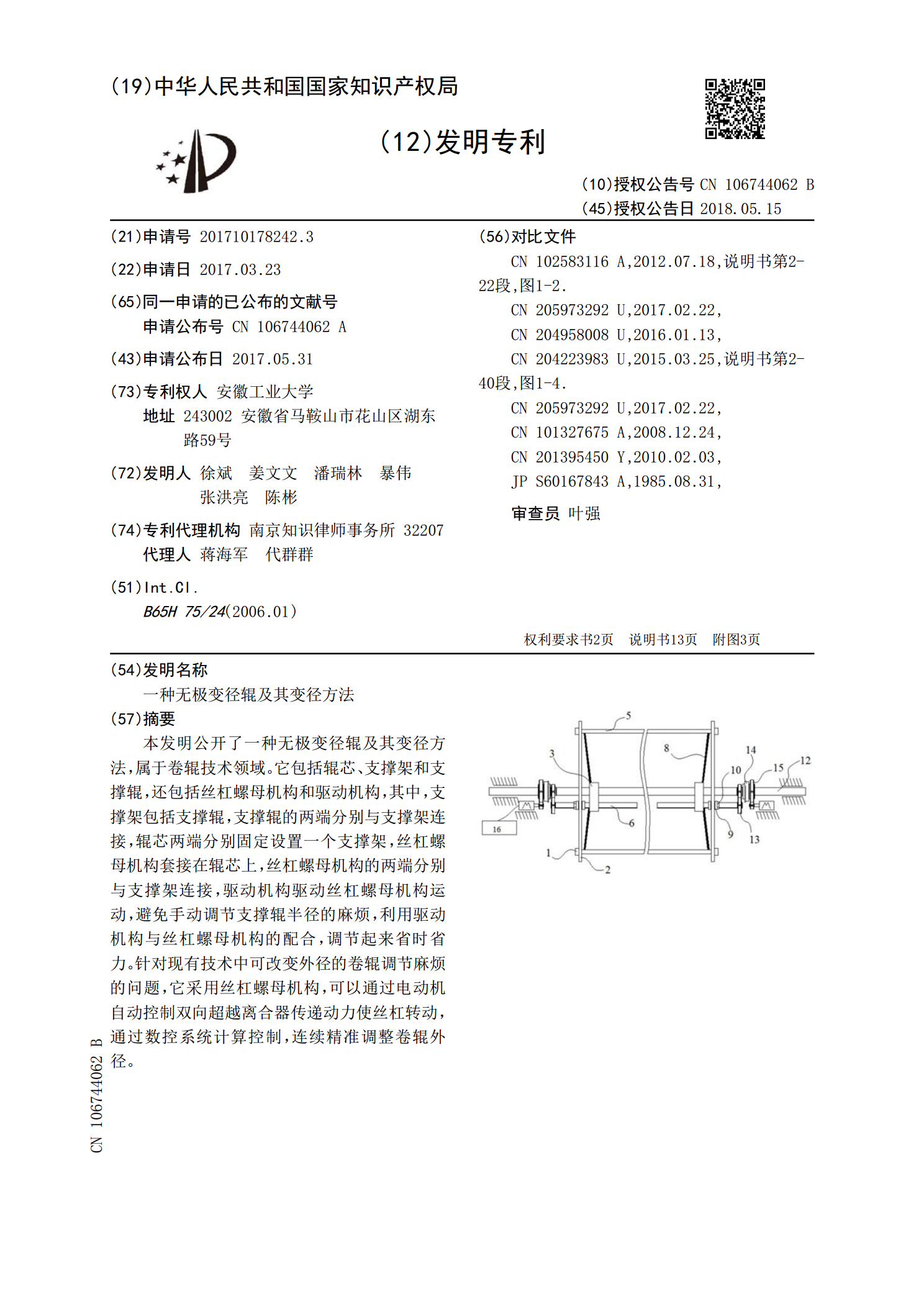
本发明公开了一种无极变径辊及其变径方法,属于卷辊技术领域。它包括辊芯、支撑架和支撑辊,还包括丝杠螺母机构和驱动机构,其中,支撑架包括支撑辊,支撑辊的两端分别与支撑架连接,辊芯两端分别固定设置一个支撑架,丝杠螺母机构套接在辊芯上,丝杠螺母机构的两端分别与支撑架连接,驱动机构驱动丝杠螺母机构运动,避免手动调节支撑辊半径的麻烦,利用驱动机构与丝杠螺母机构的配合,调节起来省时省力。针对现有技术中可改变外径的卷辊调节麻烦的问题,它采用丝杠螺母机构,可以通过电动机自动控制双向超越离合器传递动力使丝杠转动,通过数控系统

可变径的车及其变径方法.pdf
本发明公开了一种可变径的车,其中,包括:一车体,所述车体下部相对安装有两变径轮组件,所述车体下部还安装有一万向轮;所述车体上安装有一主机、一摄像头、一网格激光器;所述主机连接两所述变径轮组件、所述摄像头、所述网格激光器。本发明解决了现有技术中无法进行变径,并无法获取路况的问题,通过主机连接摄像头及网格激光器,实现对地形的识别,完成地形识别后,通过主机控制变径轮进行变径,完成障碍物的越过操作,实现主机控制变径的操作。
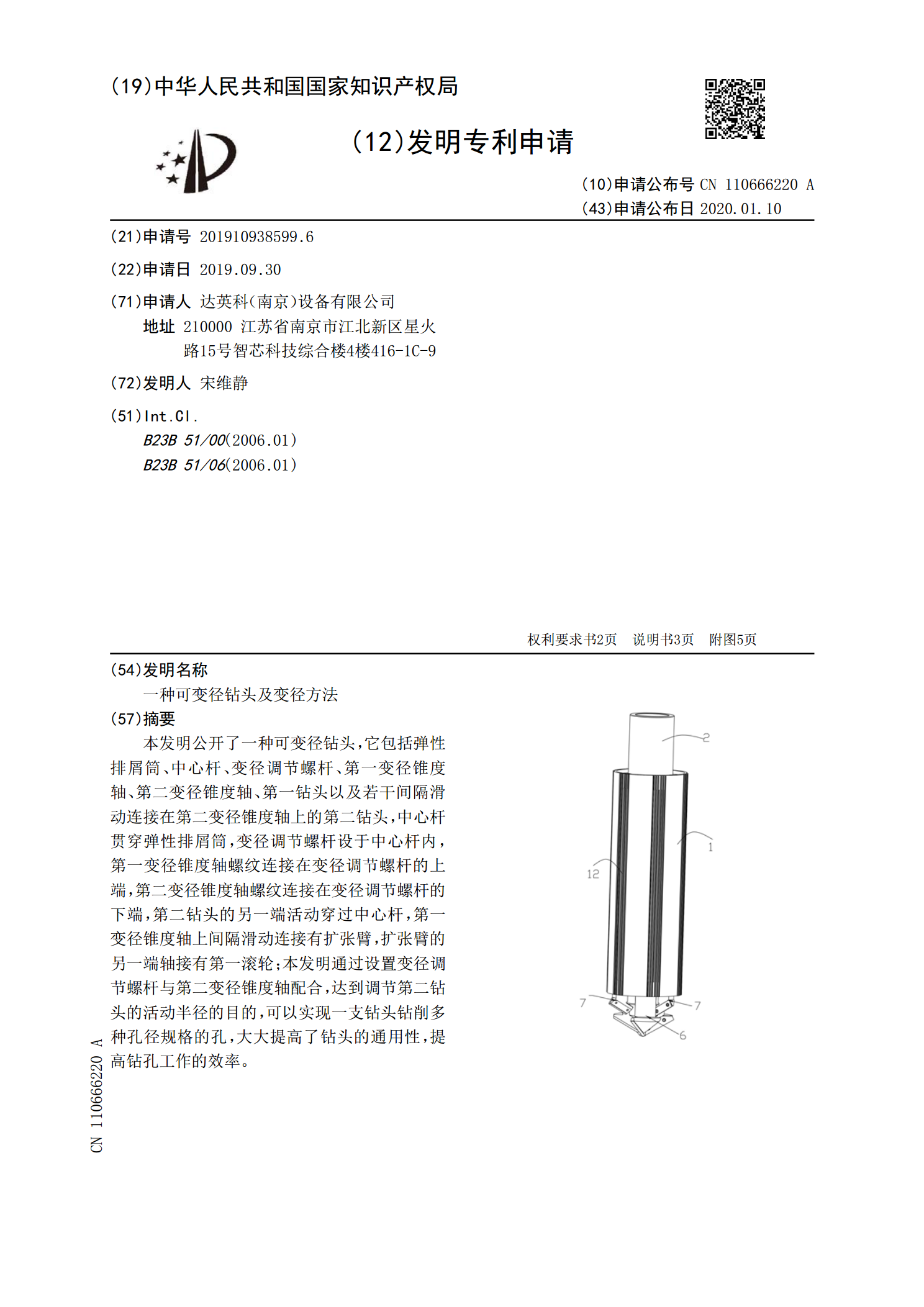
一种可变径钻头及变径方法.pdf
本发明公开了一种可变径钻头,它包括弹性排屑筒、中心杆、变径调节螺杆、第一变径锥度轴、第二变径锥度轴、第一钻头以及若干间隔滑动连接在第二变径锥度轴上的第二钻头,中心杆贯穿弹性排屑筒,变径调节螺杆设于中心杆内,第一变径锥度轴螺纹连接在变径调节螺杆的上端,第二变径锥度轴螺纹连接在变径调节螺杆的下端,第二钻头的另一端活动穿过中心杆,第一变径锥度轴上间隔滑动连接有扩张臂,扩张臂的另一端轴接有第一滚轮;本发明通过设置变径调节螺杆与第二变径锥度轴配合,达到调节第二钻头的活动半径的目的,可以实现一支钻头钻削多种孔径规格的

一种自锁紧变径的机械手的变径方法.pdf
本发明公开了一种自锁紧变径的机械手的变径方法,包括有基座,以及设于基座上的机械臂,所述机械臂自由端设有一个自锁紧变径扳手套筒;与现有技术相比,本发明通过接触头带动第一弹簧顶升拉紧芯轴,使拉紧芯轴带动三个夹爪向中心移动,进而初步夹紧螺钉,然后通过转动外套筒,使外套筒的斜面突起与夹爪的倾斜面贴靠,从而挤压夹爪进一步向中心移动,进而进一步牢牢夹紧螺钉,实现自锁紧,实现夹爪两次变径移动,能够适用不同规格的螺钉拧紧,结构更灵活;另外通过外套筒的斜面突起与夹爪的倾斜面配合,将外套筒的扭力转变为螺钉的夹紧力,从而实现更