
可变径的车及其变径方法.pdf

努力****星驰

1/10
2/10
3/10
4/10

5/10

6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

可变径的车及其变径方法.pdf
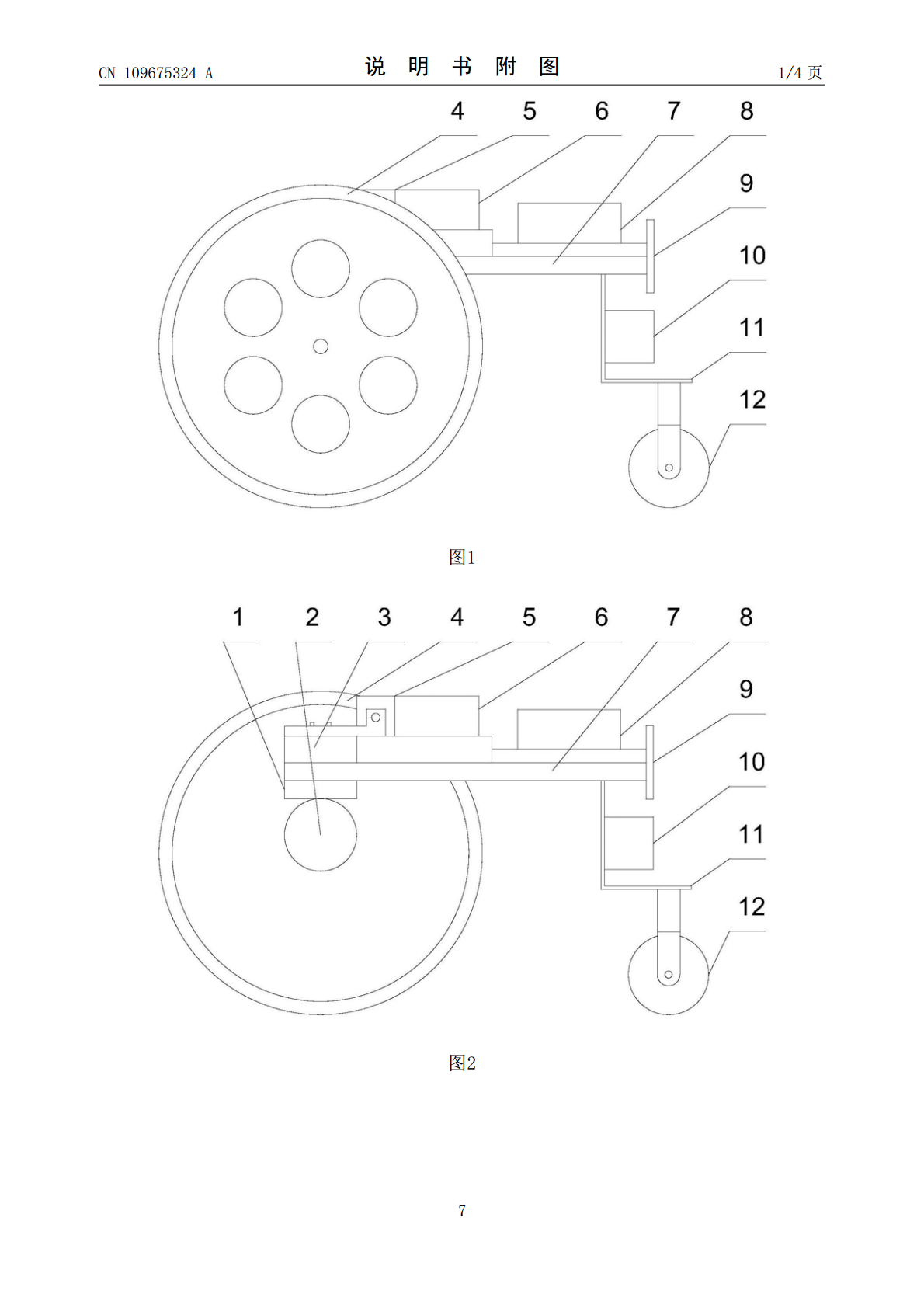
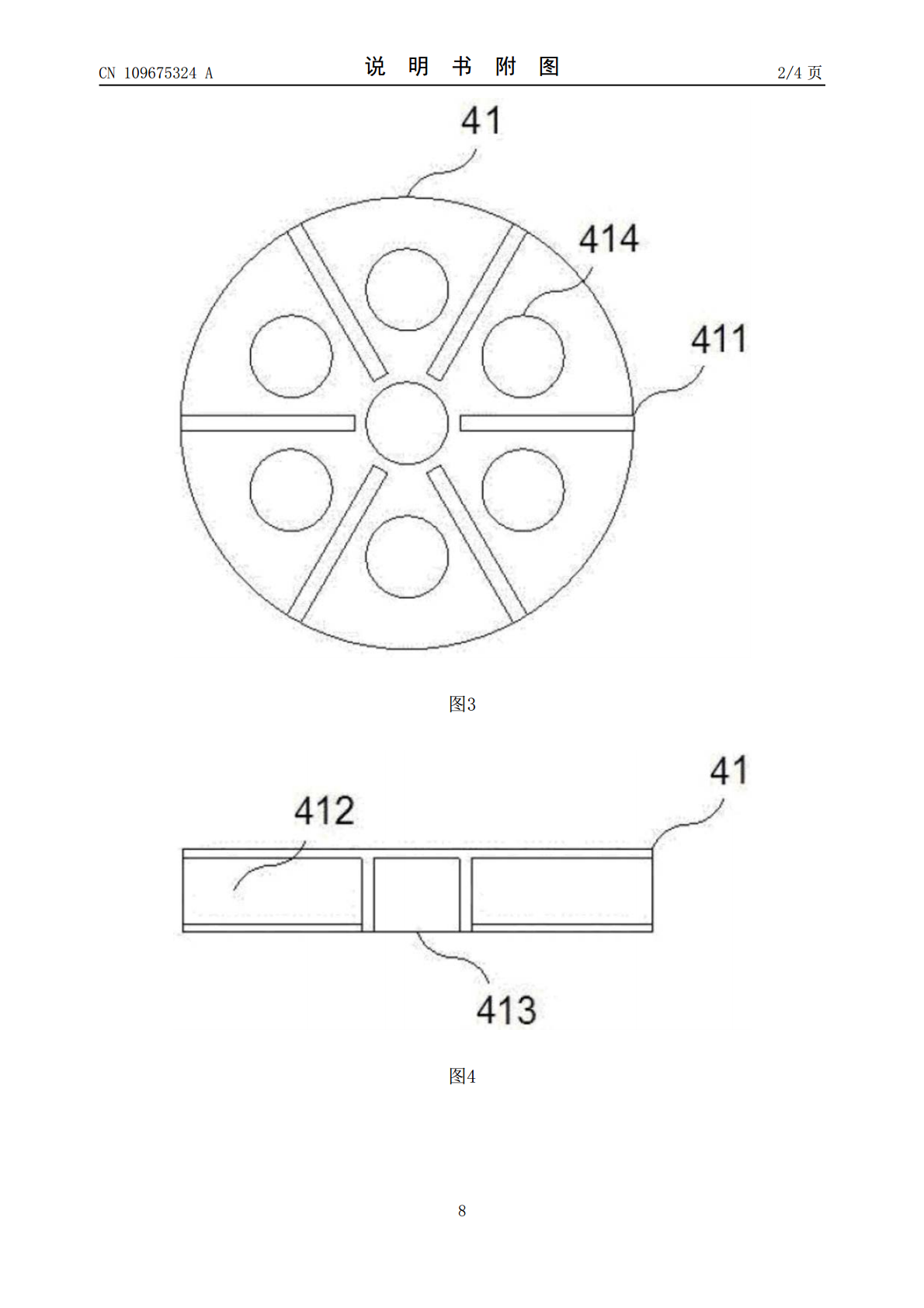
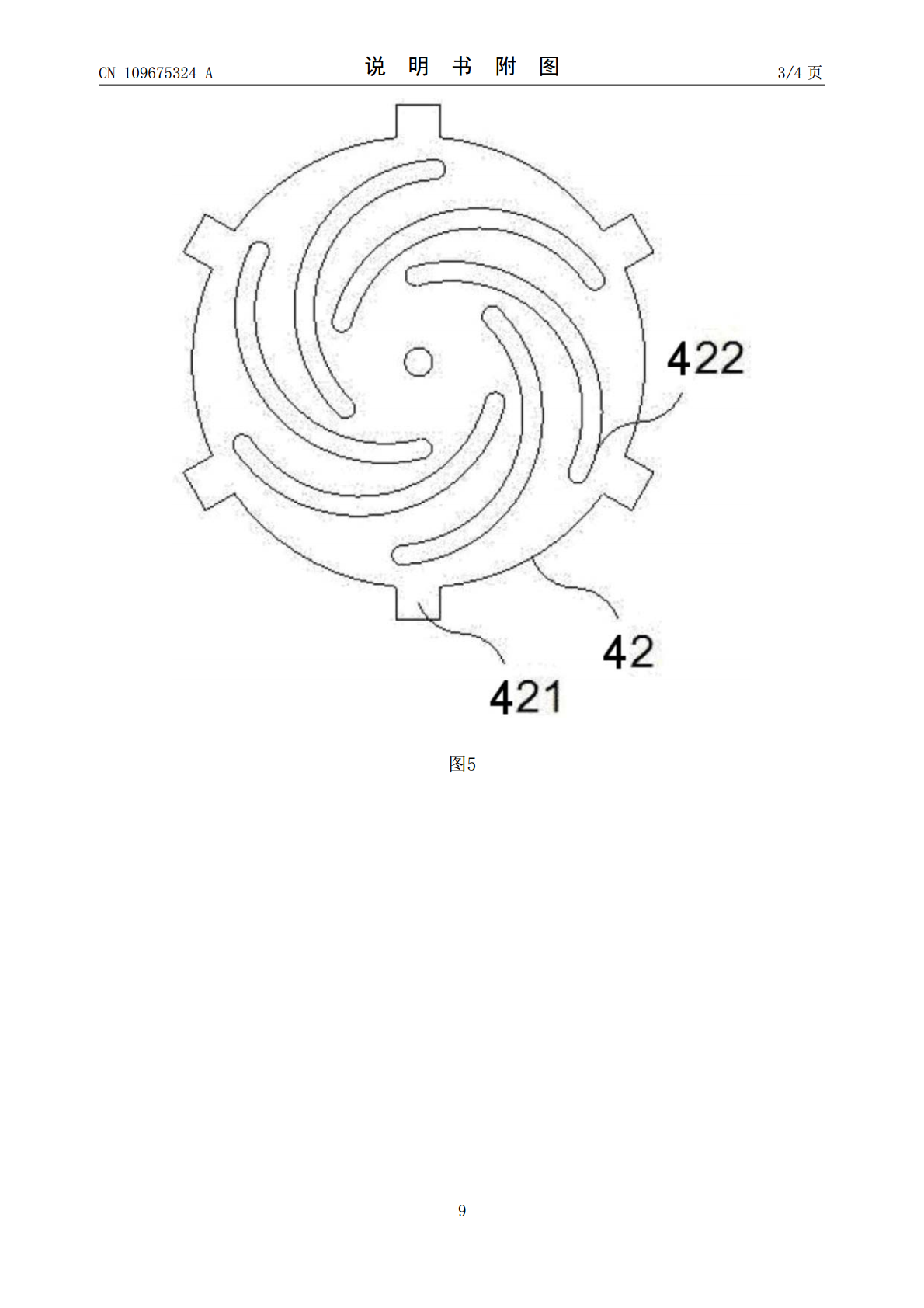
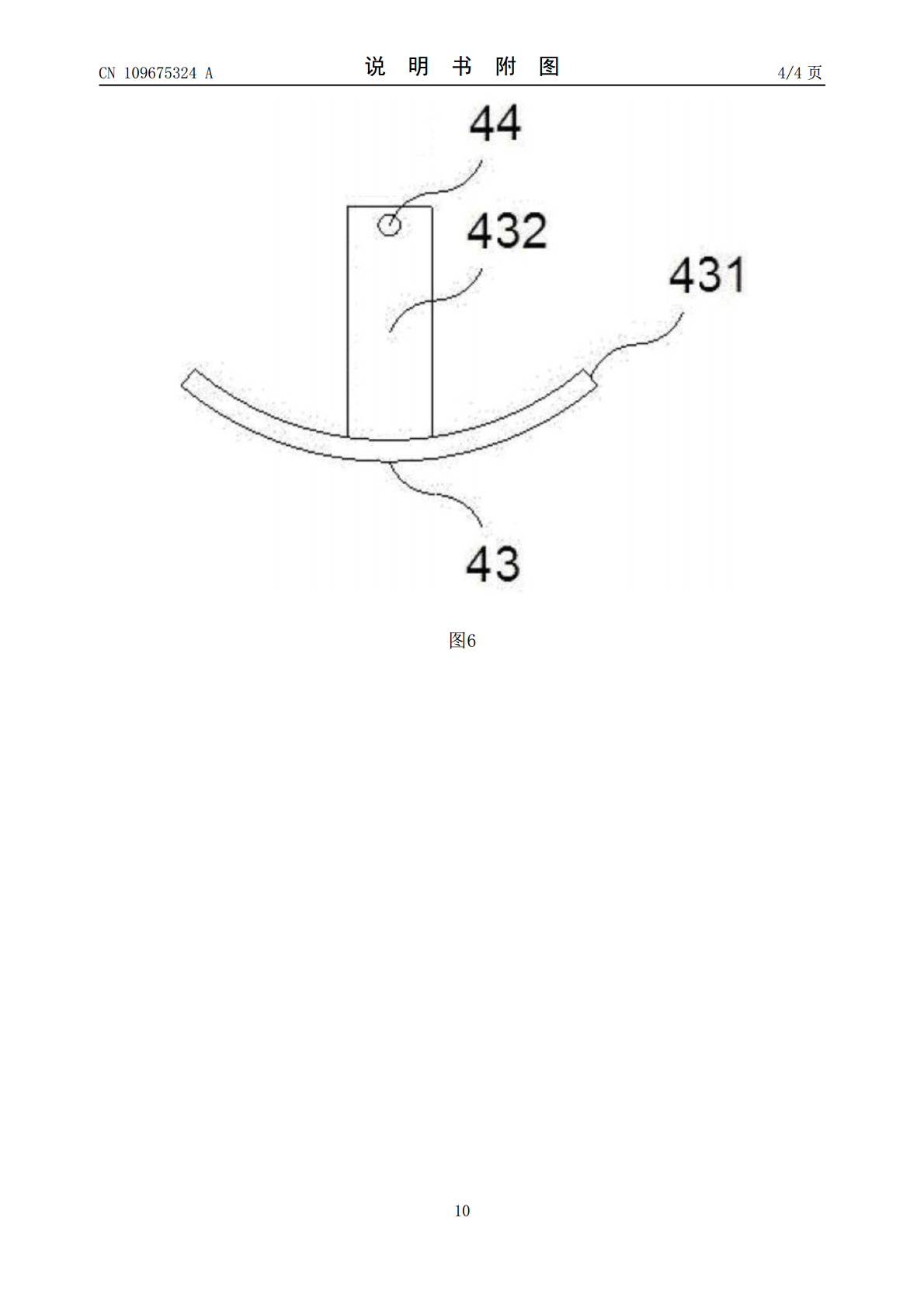
本发明公开了一种可变径的车,其中,包括:一车体,所述车体下部相对安装有两变径轮组件,所述车体下部还安装有一万向轮;所述车体上安装有一主机、一摄像头、一网格激光器;所述主机连接两所述变径轮组件、所述摄像头、所述网格激光器。本发明解决了现有技术中无法进行变径,并无法获取路况的问题,通过主机连接摄像头及网格激光器,实现对地形的识别,完成地形识别后,通过主机控制变径轮进行变径,完成障碍物的越过操作,实现主机控制变径的操作。
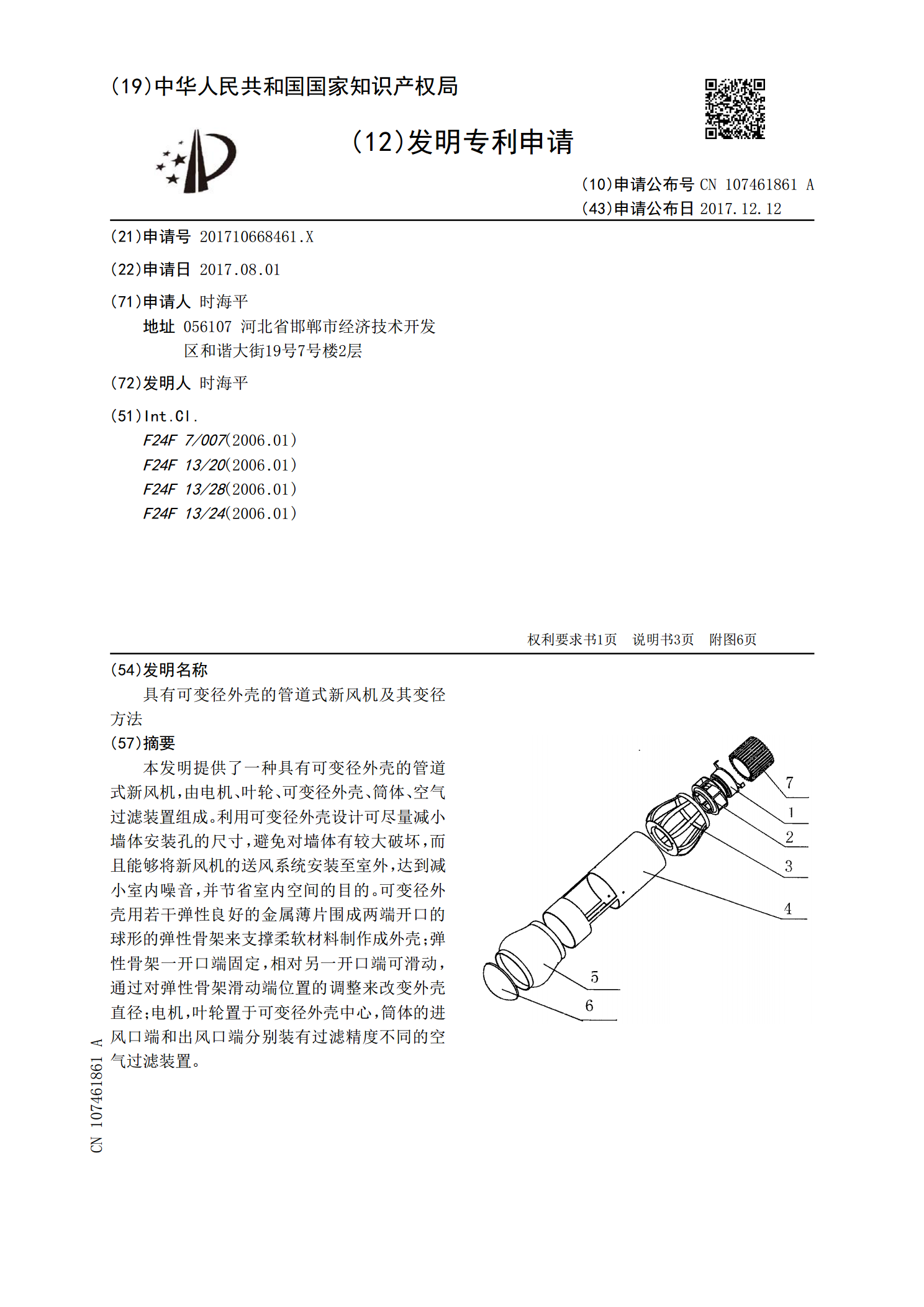
具有可变径外壳的管道式新风机及其变径方法.pdf
本发明提供了一种具有可变径外壳的管道式新风机,由电机、叶轮、可变径外壳、筒体、空气过滤装置组成。利用可变径外壳设计可尽量减小墙体安装孔的尺寸,避免对墙体有较大破坏,而且能够将新风机的送风系统安装至室外,达到减小室内噪音,并节省室内空间的目的。可变径外壳用若干弹性良好的金属薄片围成两端开口的球形的弹性骨架来支撑柔软材料制作成外壳;弹性骨架一开口端固定,相对另一开口端可滑动,通过对弹性骨架滑动端位置的调整来改变外壳直径;电机,叶轮置于可变径外壳中心,筒体的进风口端和出风口端分别装有过滤精度不同的空气过滤装置。
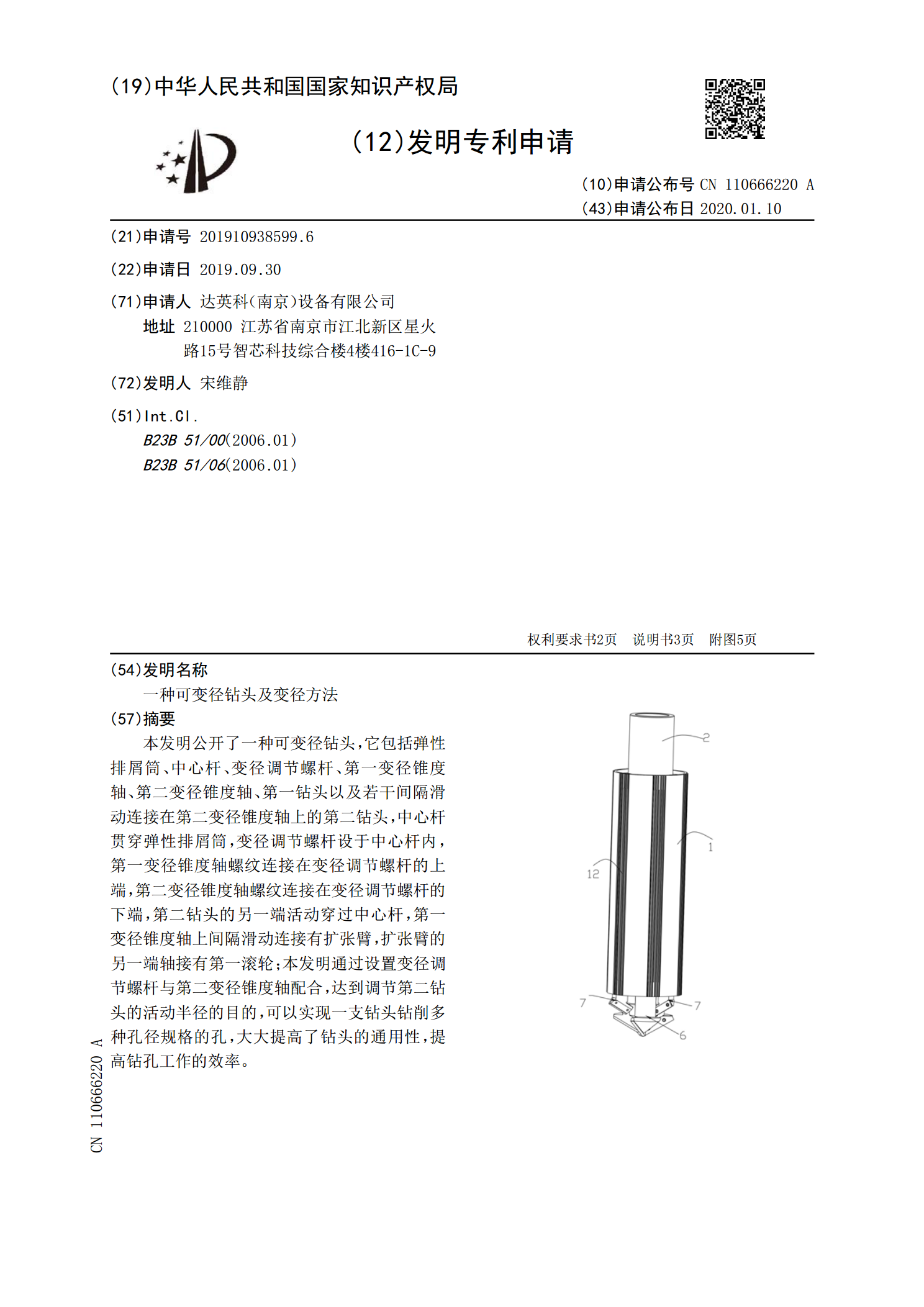
一种可变径钻头及变径方法.pdf
本发明公开了一种可变径钻头,它包括弹性排屑筒、中心杆、变径调节螺杆、第一变径锥度轴、第二变径锥度轴、第一钻头以及若干间隔滑动连接在第二变径锥度轴上的第二钻头,中心杆贯穿弹性排屑筒,变径调节螺杆设于中心杆内,第一变径锥度轴螺纹连接在变径调节螺杆的上端,第二变径锥度轴螺纹连接在变径调节螺杆的下端,第二钻头的另一端活动穿过中心杆,第一变径锥度轴上间隔滑动连接有扩张臂,扩张臂的另一端轴接有第一滚轮;本发明通过设置变径调节螺杆与第二变径锥度轴配合,达到调节第二钻头的活动半径的目的,可以实现一支钻头钻削多种孔径规格的
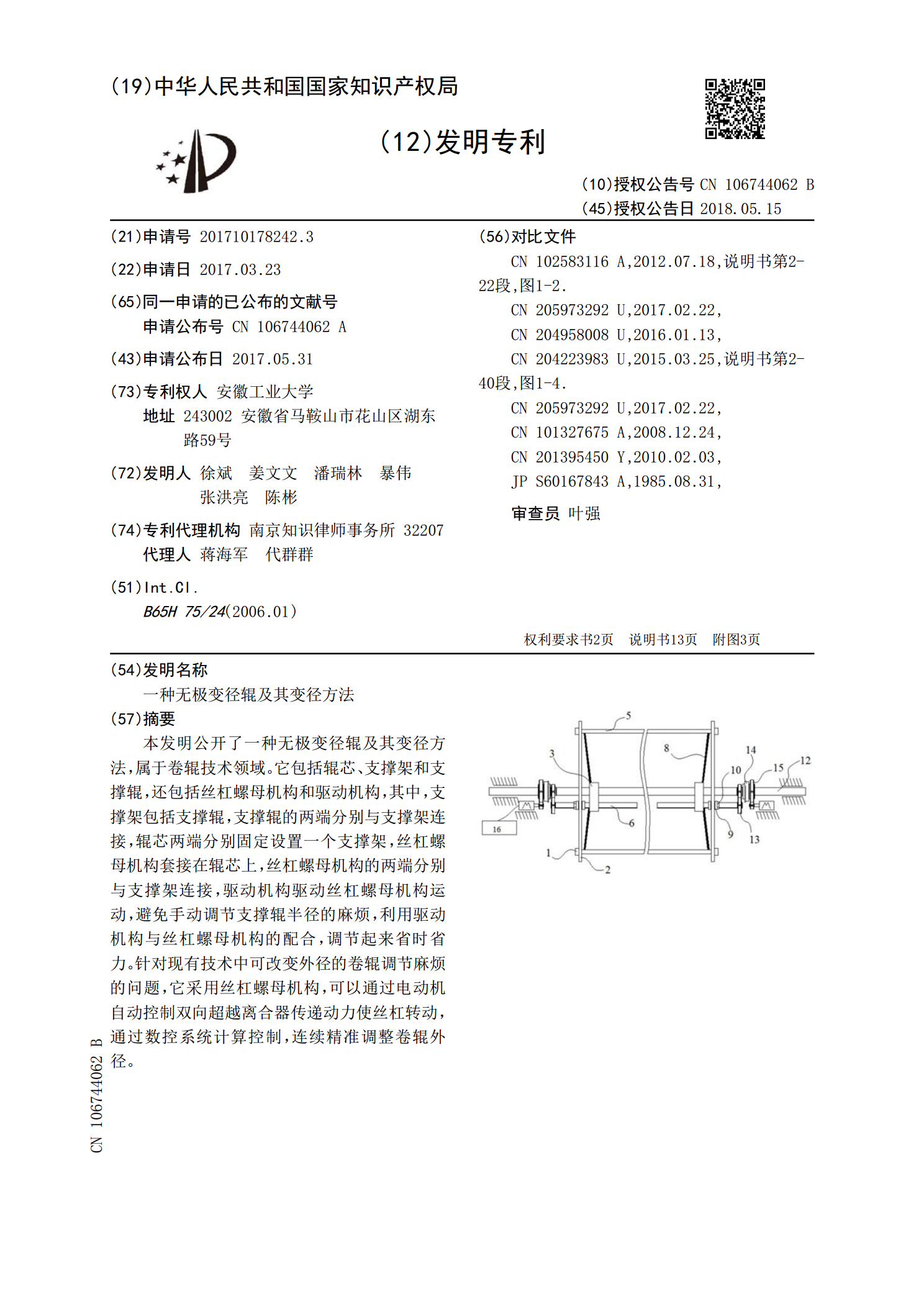
一种无极变径辊及其变径方法.pdf
本发明公开了一种无极变径辊及其变径方法,属于卷辊技术领域。它包括辊芯、支撑架和支撑辊,还包括丝杠螺母机构和驱动机构,其中,支撑架包括支撑辊,支撑辊的两端分别与支撑架连接,辊芯两端分别固定设置一个支撑架,丝杠螺母机构套接在辊芯上,丝杠螺母机构的两端分别与支撑架连接,驱动机构驱动丝杠螺母机构运动,避免手动调节支撑辊半径的麻烦,利用驱动机构与丝杠螺母机构的配合,调节起来省时省力。针对现有技术中可改变外径的卷辊调节麻烦的问题,它采用丝杠螺母机构,可以通过电动机自动控制双向超越离合器传递动力使丝杠转动,通过数控系统

可变径盾构机及其洞内变径施工方法.pdf
本发明提供了一种可变径盾构机,其包括盾体、主驱动、可变径刀盘、推进装置、管片拼装系统、机械开挖装置;盾体包括可变径前盾、盾体套壳及尾盾;机械开挖装置包括伸缩机构及扩挖机构;伸缩机构设置于管片拼装系统上,且能随管片拼装系统平移、回转;扩挖机构设置于伸缩机构上,且能在伸缩机构的带动下沿径向伸缩,以在尾盾与可变径前盾断开后,在尾盾与可变径前盾之间开挖土层形成扩挖空间。同时,本发明还提供了一种可变径盾构机的洞内变径施工方法。与现有技术相比,本发明提供的可变径盾构机及其洞内变径施工方法在洞内即可实现变径,可以缩短施