
自动搬运装置及通过该自动搬运装置实施的搬运方法.pdf

梅雪****67

1/10

2/10

3/10
4/10

5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自动搬运装置及通过该自动搬运装置实施的搬运方法.pdf
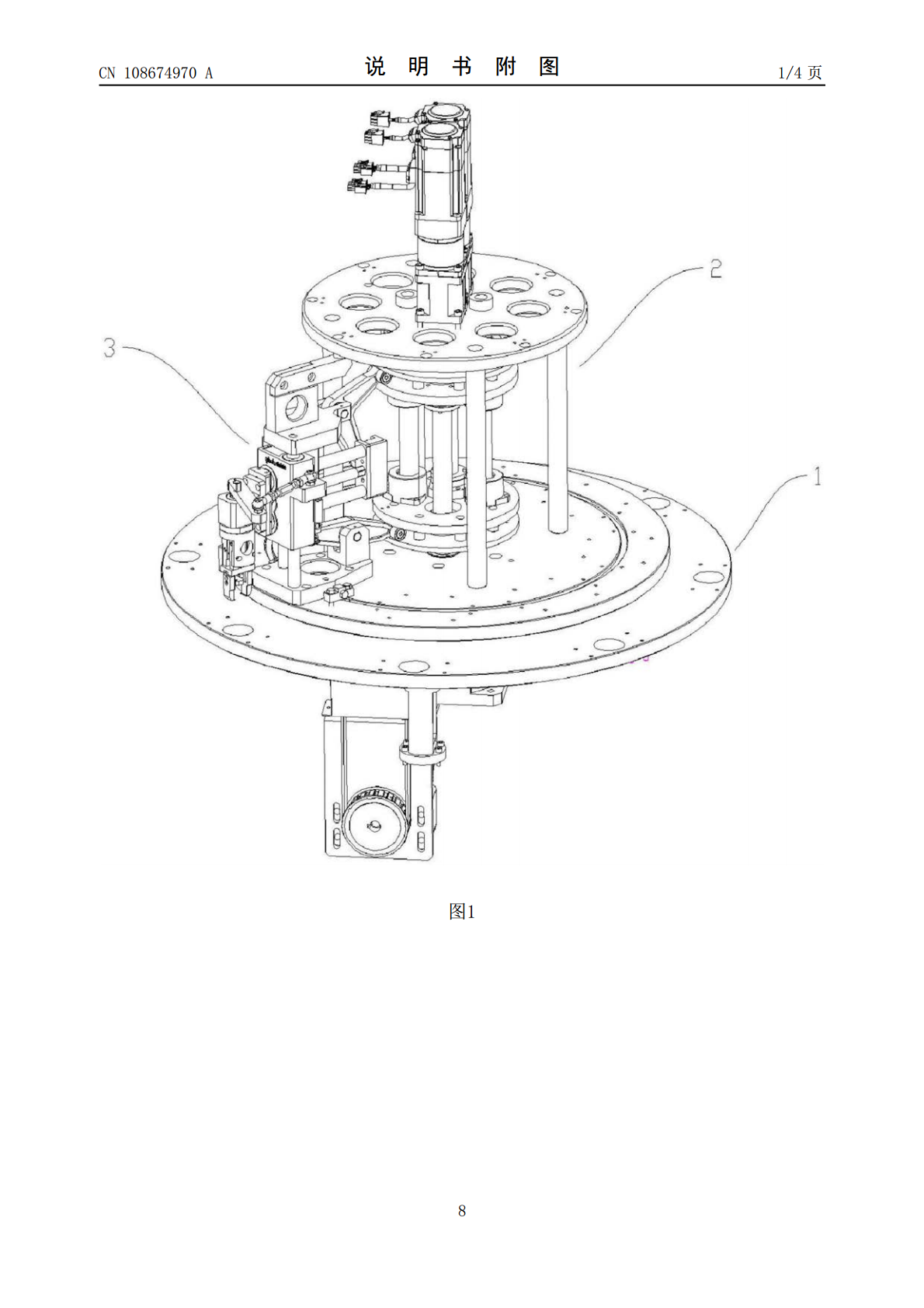
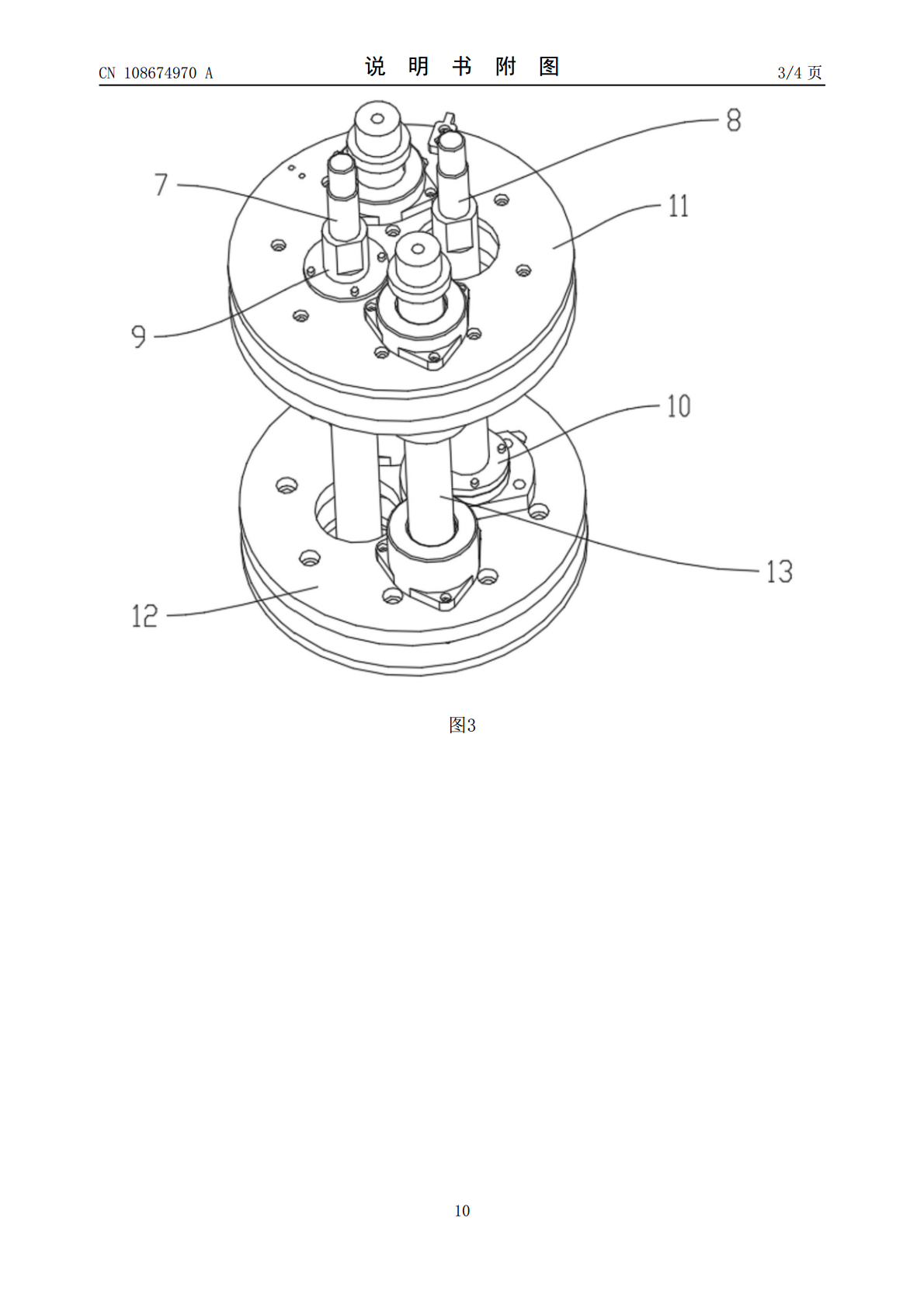
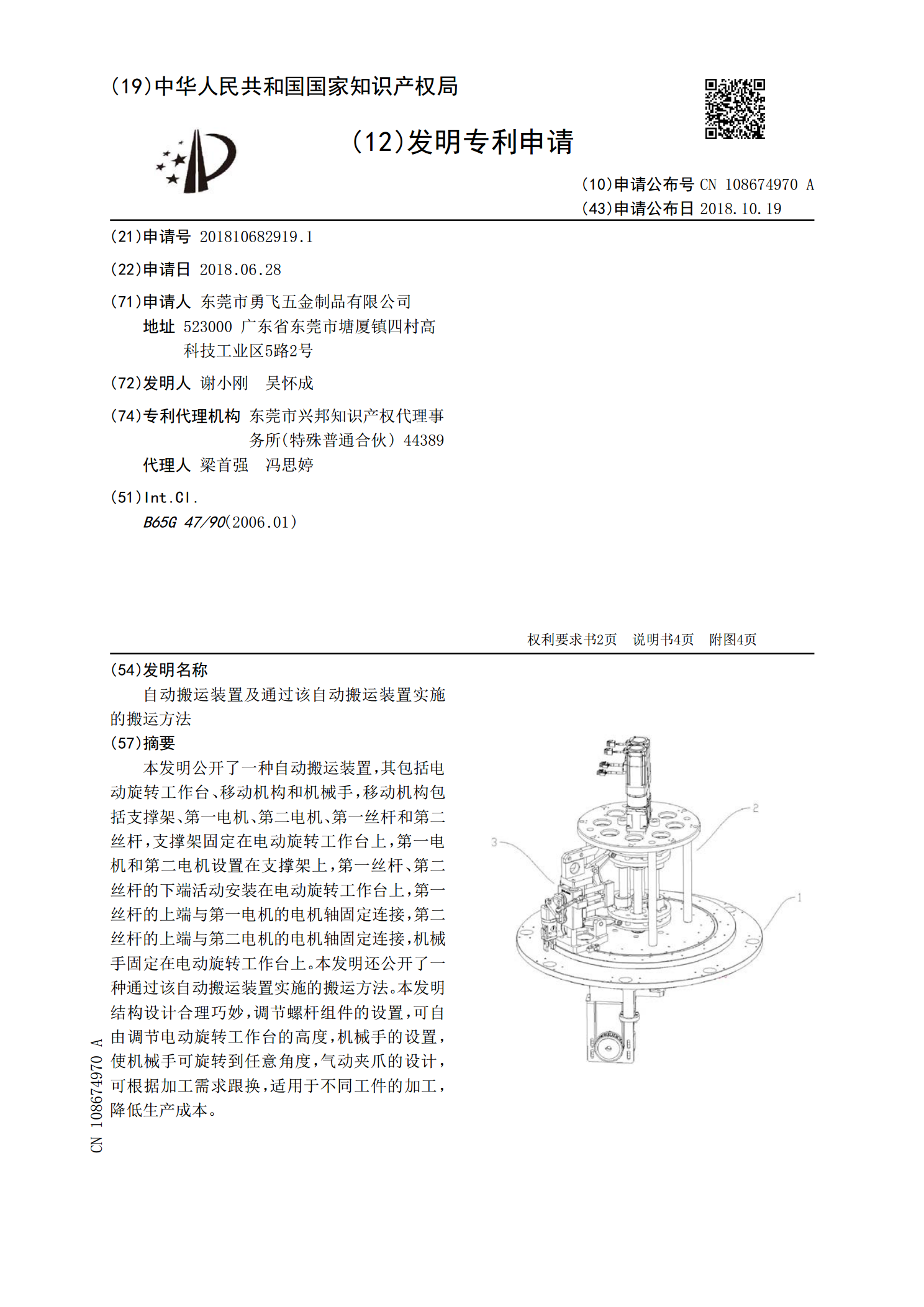
本发明公开了一种自动搬运装置,其包括电动旋转工作台、移动机构和机械手,移动机构包括支撑架、第一电机、第二电机、第一丝杆和第二丝杆,支撑架固定在电动旋转工作台上,第一电机和第二电机设置在支撑架上,第一丝杆、第二丝杆的下端活动安装在电动旋转工作台上,第一丝杆的上端与第一电机的电机轴固定连接,第二丝杆的上端与第二电机的电机轴固定连接,机械手固定在电动旋转工作台上。本发明还公开了一种通过该自动搬运装置实施的搬运方法。本发明结构设计合理巧妙,调节螺杆组件的设置,可自由调节电动旋转工作台的高度,机械手的设置,使机械手

自动导向搬运装置.pdf
一种自动导向搬运装置,包括底盘、第一与第二驱动组件。底盘下方设置有支撑底盘的多个支撑轮,上方设置承载平台。第一与第二驱动组件并列设置于底盘下方,分别包括第一与第二固定架、第一与第二驱动架、至少一第一与第二连杆及第一与第二预压构件。第一与第二固定架固设于底盘下方。第一与第二驱动架分别用以设置第一与第二驱动轮。第一连杆与第一预压构件连接于第一固定架与第一驱动架之间,第二连杆与第二预压构件连接于第二固定架与第二驱动架之间。第一与第二预压构件分别用以施加向下的第一与第二压力至第一与第二驱动轮。

自动导引式搬运装置.pdf
本申请公开了一种自动导引式搬运装置,包括车架、驱动机构、载物机构、坐标识别机构以及控制系统。该驱动机构分布在车架的两端,其包括两个平行设置的驱动轮,每个驱动轮由独立的动力件进行驱动实现独立的正转或反转,每个驱动机构的两个驱动轮以可整体转动的方式安装在车架上,其转动中心线垂直于两个驱动轮中心连线。当两个驱动轮同向转动时,驱动机构前进;当两个驱动轮方向转动时,驱动机构原地转圈。因此,在控制系统的控制下,该搬运装置的驱动机构可转动到任一方向,即可向任一方向自由移动。
搬运装置及搬运方法.pdf
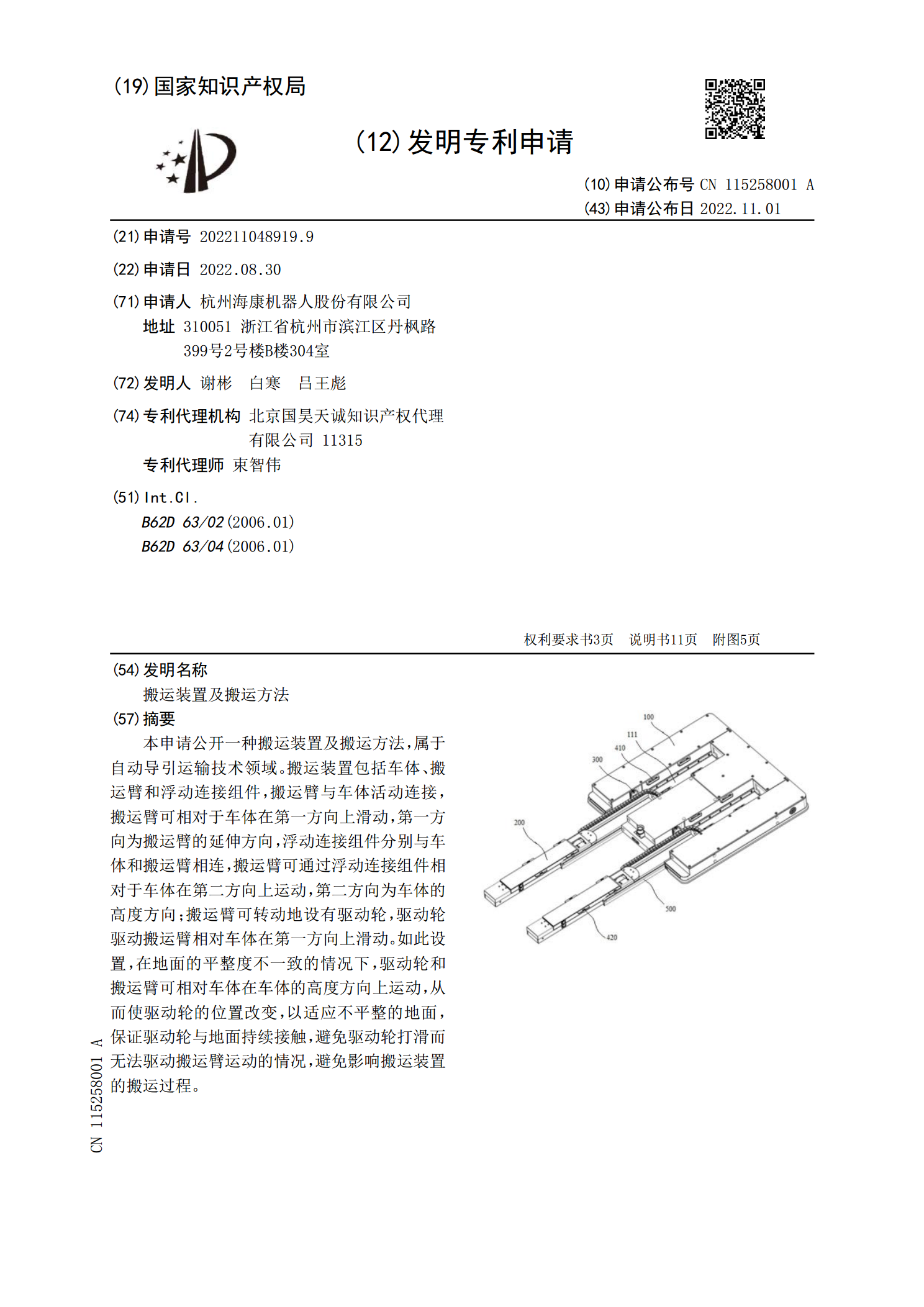
本申请公开一种搬运装置及搬运方法,属于自动导引运输技术领域。搬运装置包括车体、搬运臂和浮动连接组件,搬运臂与车体活动连接,搬运臂可相对于车体在第一方向上滑动,第一方向为搬运臂的延伸方向,浮动连接组件分别与车体和搬运臂相连,搬运臂可通过浮动连接组件相对于车体在第二方向上运动,第二方向为车体的高度方向;搬运臂可转动地设有驱动轮,驱动轮驱动搬运臂相对车体在第一方向上滑动。如此设置,在地面的平整度不一致的情况下,驱动轮和搬运臂可相对车体在车体的高度方向上运动,从而使驱动轮的位置改变,以适应不平整的地面,保证驱动轮

搬运装置、印刷装置及搬运方法.pdf
搬运装置具有第二搬运输送器(33)和搬出输送器(34)。第二搬运输送器(33)在水平配置的带轮(33A、33B)环状地架设有搬运带(33C)。在搬运带(33C)的外表面设置有多个保持部。若保持部移动至交接位置,则通过鼓风机构(33D)将空气从该保持部喷出,从而将保持部保持的片剂分离。交接位置是带轮的外周面(33A)中的比铅垂下方向更靠上侧且比通过带轮(33A)的中心点的水平方向更靠下侧的位置。搬出输送器(34)比第二搬运输送器更靠下方配置,对从保持部分离的片剂进行搬运。