
智能吸尘器控制系统及智能吸尘器清扫方法.pdf

慧红****ad


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

智能吸尘器控制系统及智能吸尘器清扫方法.pdf
本发明公开了一种智能吸尘器控制系统包括:智能控制模块,接收信号,并依据接收到的信号向吸尘器轮子的驱动电机发送动作指令;障碍探测模块探测吸尘器行进路线中的障碍物,并转化成控制信号发送给所述智能控制模块;角度感应模块,感应所述吸尘器旋转的角度,并将感应到的角度转化成控制信号发送给所述智能控制模块。通过本发明,能够实现区域的完全清扫,不会重复清扫,清扫效率高。本发明同时公开了利用上述技术方案中任一所述的智能吸尘器控制系统控制智能吸尘器清扫的方法。
智能吸尘器.pdf
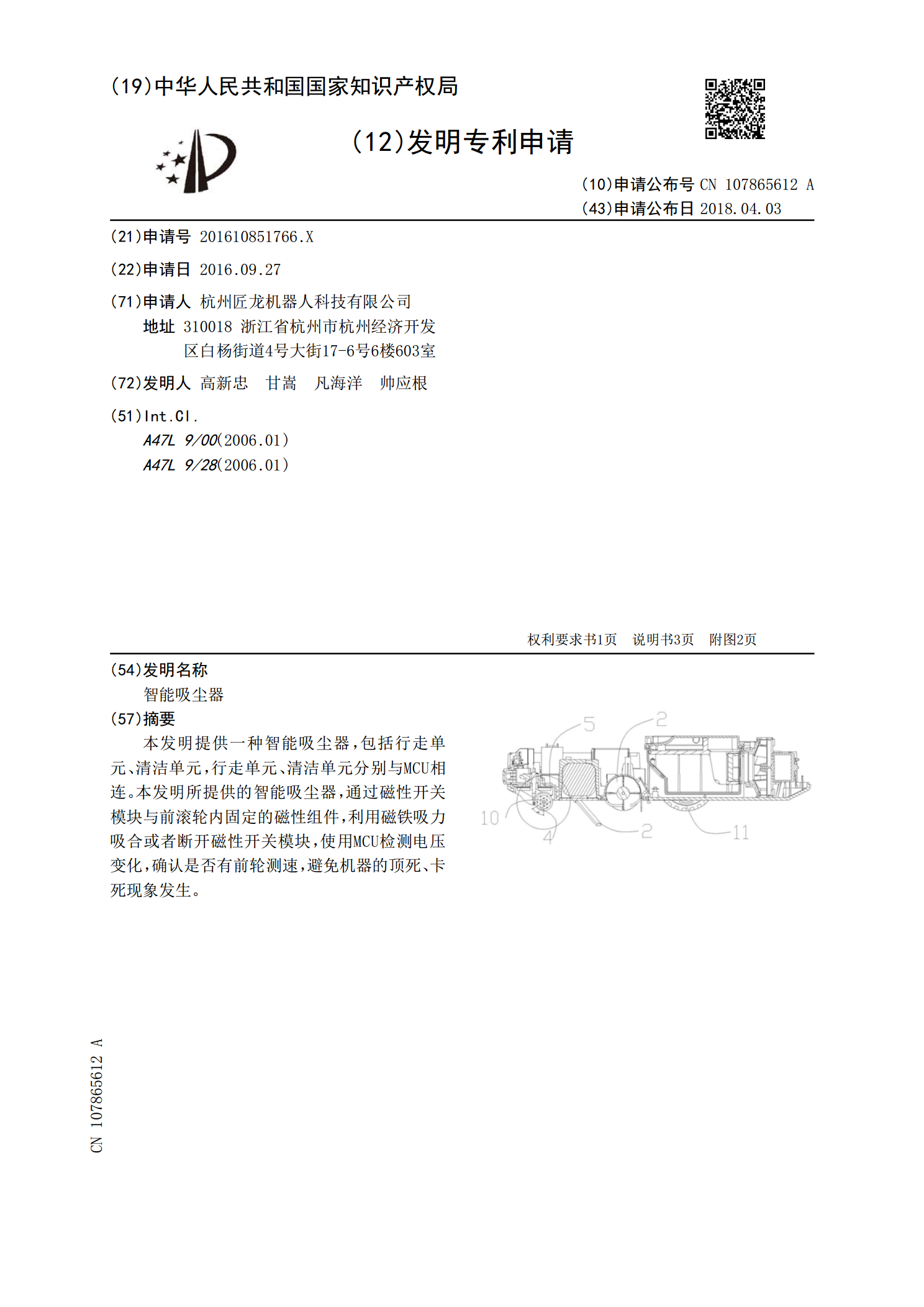
本发明提供一种智能吸尘器,包括行走单元、清洁单元,行走单元、清洁单元分别与MCU相连。本发明所提供的智能吸尘器,通过磁性开关模块与前滚轮内固定的磁性组件,利用磁铁吸力吸合或者断开磁性开关模块,使用MCU检测电压变化,确认是否有前轮测速,避免机器的顶死、卡死现象发生。
智能吸尘器.pdf
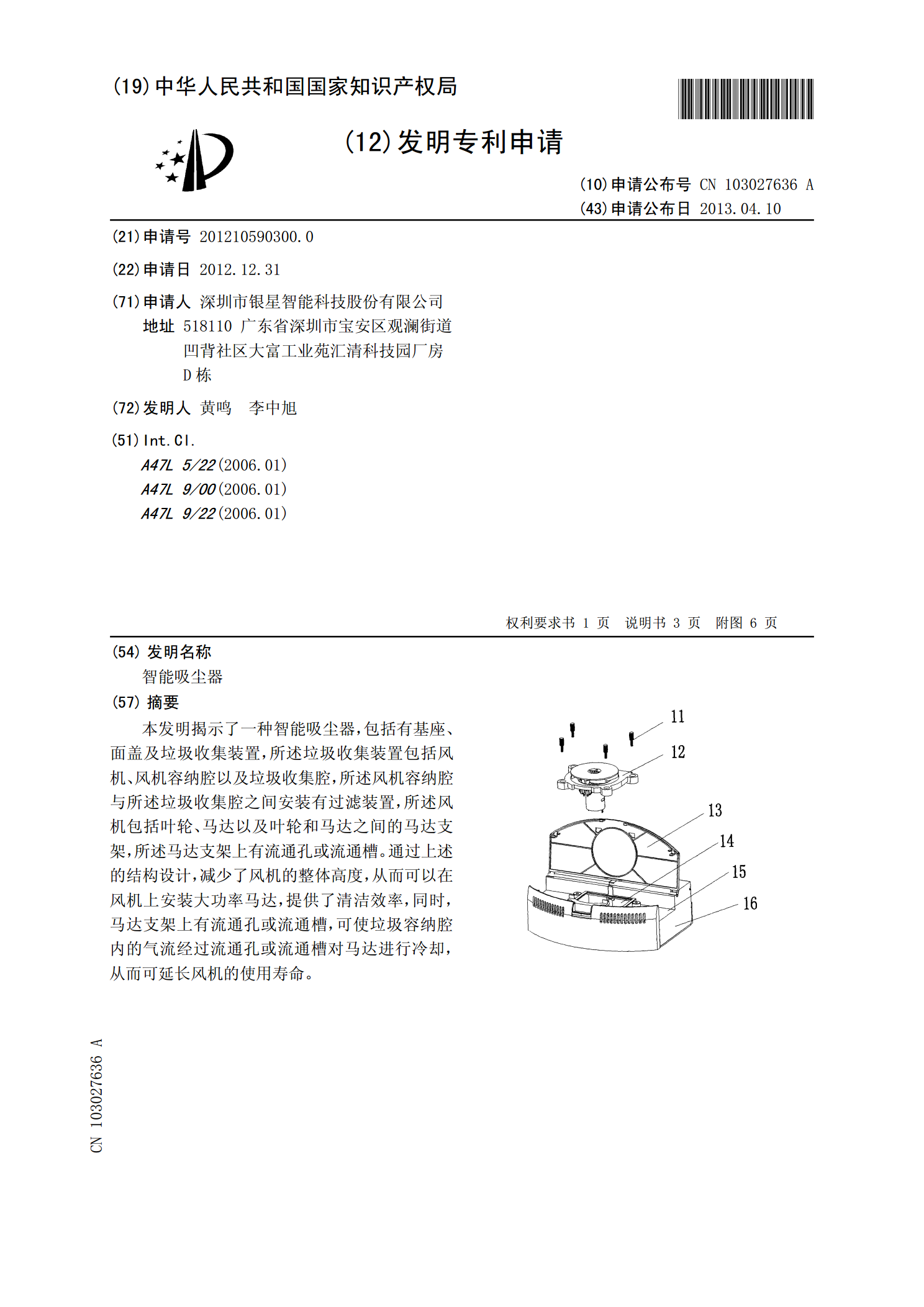
本发明揭示了一种智能吸尘器,包括有基座、面盖及垃圾收集装置,所述垃圾收集装置包括风机、风机容纳腔以及垃圾收集腔,所述风机容纳腔与所述垃圾收集腔之间安装有过滤装置,所述风机包括叶轮、马达以及叶轮和马达之间的马达支架,所述马达支架上有流通孔或流通槽。通过上述的结构设计,减少了风机的整体高度,从而可以在风机上安装大功率马达,提供了清洁效率,同时,马达支架上有流通孔或流通槽,可使垃圾容纳腔内的气流经过流通孔或流通槽对马达进行冷却,从而可延长风机的使用寿命。
智能吸尘器.pdf
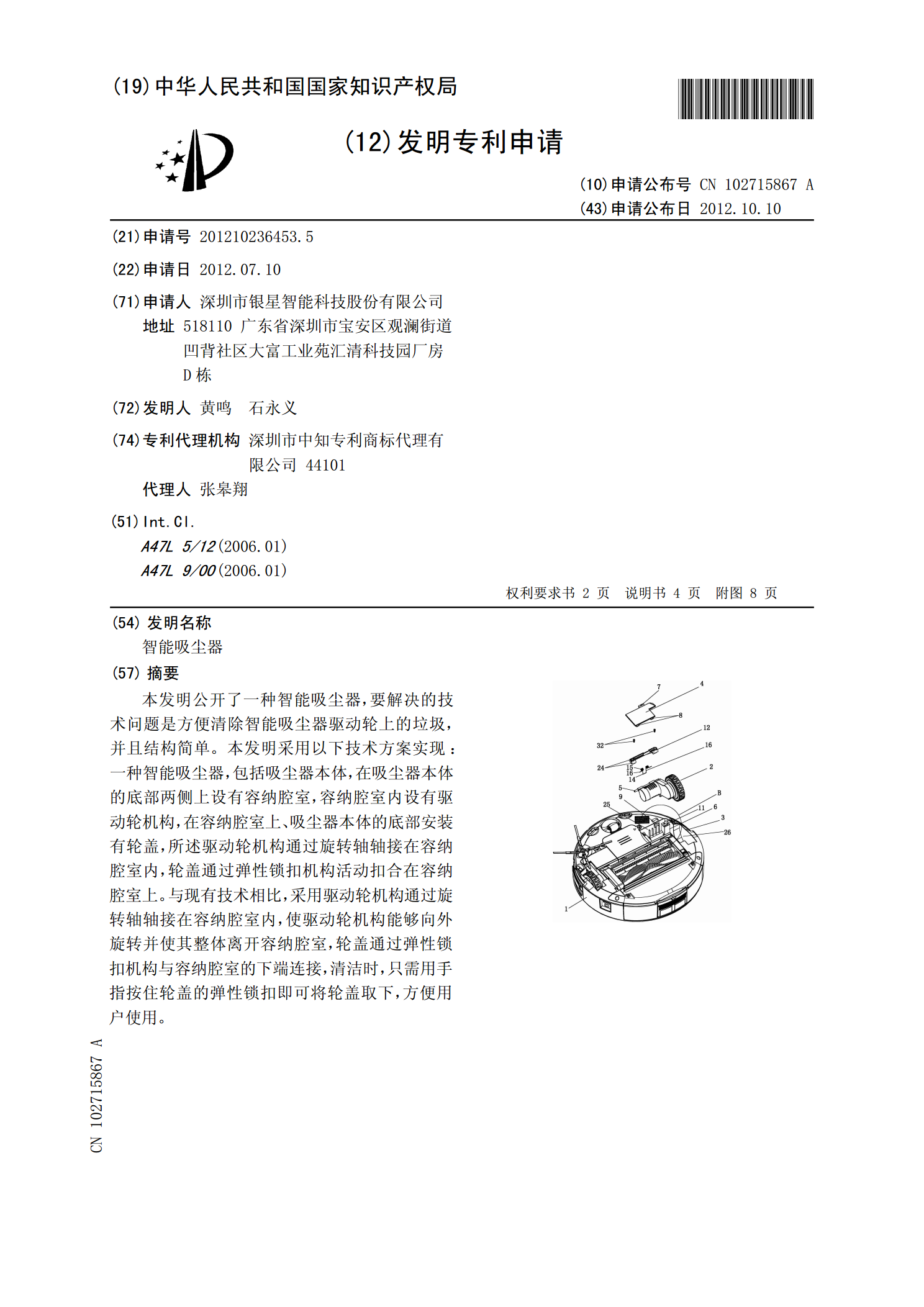
本发明公开了一种智能吸尘器,要解决的技术问题是方便清除智能吸尘器驱动轮上的垃圾,并且结构简单。本发明采用以下技术方案实现:一种智能吸尘器,包括吸尘器本体,在吸尘器本体的底部两侧上设有容纳腔室,容纳腔室内设有驱动轮机构,在容纳腔室上、吸尘器本体的底部安装有轮盖,所述驱动轮机构通过旋转轴轴接在容纳腔室内,轮盖通过弹性锁扣机构活动扣合在容纳腔室上。与现有技术相比,采用驱动轮机构通过旋转轴轴接在容纳腔室内,使驱动轮机构能够向外旋转并使其整体离开容纳腔室,轮盖通过弹性锁扣机构与容纳腔室的下端连接,清洁时,只需用手指
智能吸尘器.pdf
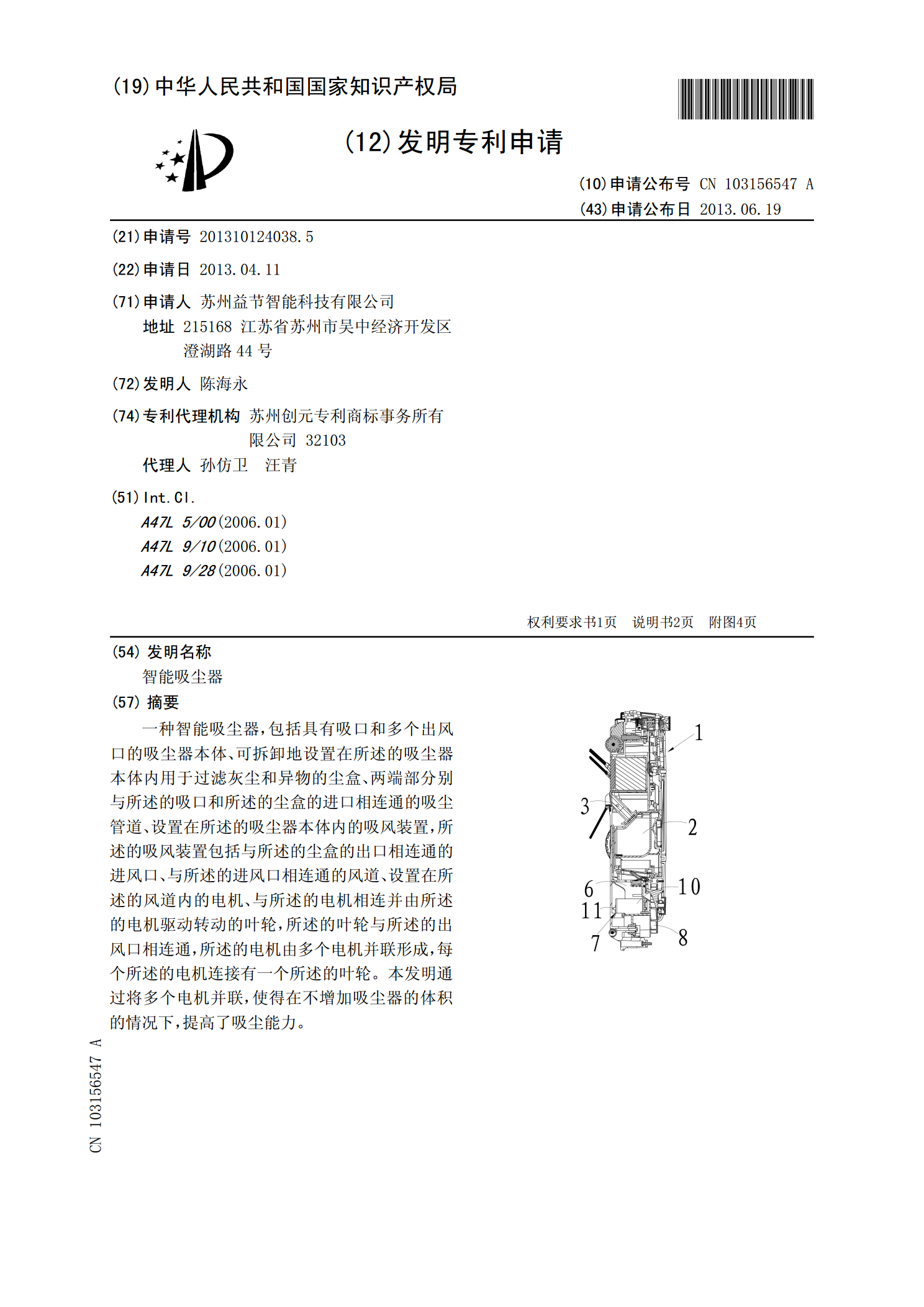
一种智能吸尘器,包括具有吸口和多个出风口的吸尘器本体、可拆卸地设置在所述的吸尘器本体内用于过滤灰尘和异物的尘盒、两端部分别与所述的吸口和所述的尘盒的进口相连通的吸尘管道、设置在所述的吸尘器本体内的吸风装置,所述的吸风装置包括与所述的尘盒的出口相连通的进风口、与所述的进风口相连通的风道、设置在所述的风道内的电机、与所述的电机相连并由所述的电机驱动转动的叶轮,所述的叶轮与所述的出风口相连通,所述的电机由多个电机并联形成,每个所述的电机连接有一个所述的叶轮。本发明通过将多个电机并联,使得在不增加吸尘器的体积的情