
一种悬挂巡查的管道侦查机器人及悬挂巡查方法.pdf

小琛****82


1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种悬挂巡查的管道侦查机器人及悬挂巡查方法.pdf
一种悬挂巡查的管道侦查机器人及悬挂巡查方法,包括行走模块、侦查模块、电磁铁、压力传感器、控制模块和通信模块,行走模块包括两只机械脚,电磁铁分别设置在两只机械脚的底部,用于吸附住管道的内壁进行行走,压力传感器用于感应机械脚与管道内壁之间的吸附力,以判断机械脚是否吸附正常,侦查模块包括侦查摄像头、测厚仪、粉尘检测仪、测温仪、测氧仪、风速仪、湿度仪等;每只机械脚均包括旋转驱动组件、关节和安装板,或每只机械脚均包括若干组双轴舵机和安装板。本发明可使机器人能更顺利完成巡检任务,适应不同管径和铺设角度以及各种恶劣环境
一种水面巡查机器人及巡查方法.pdf
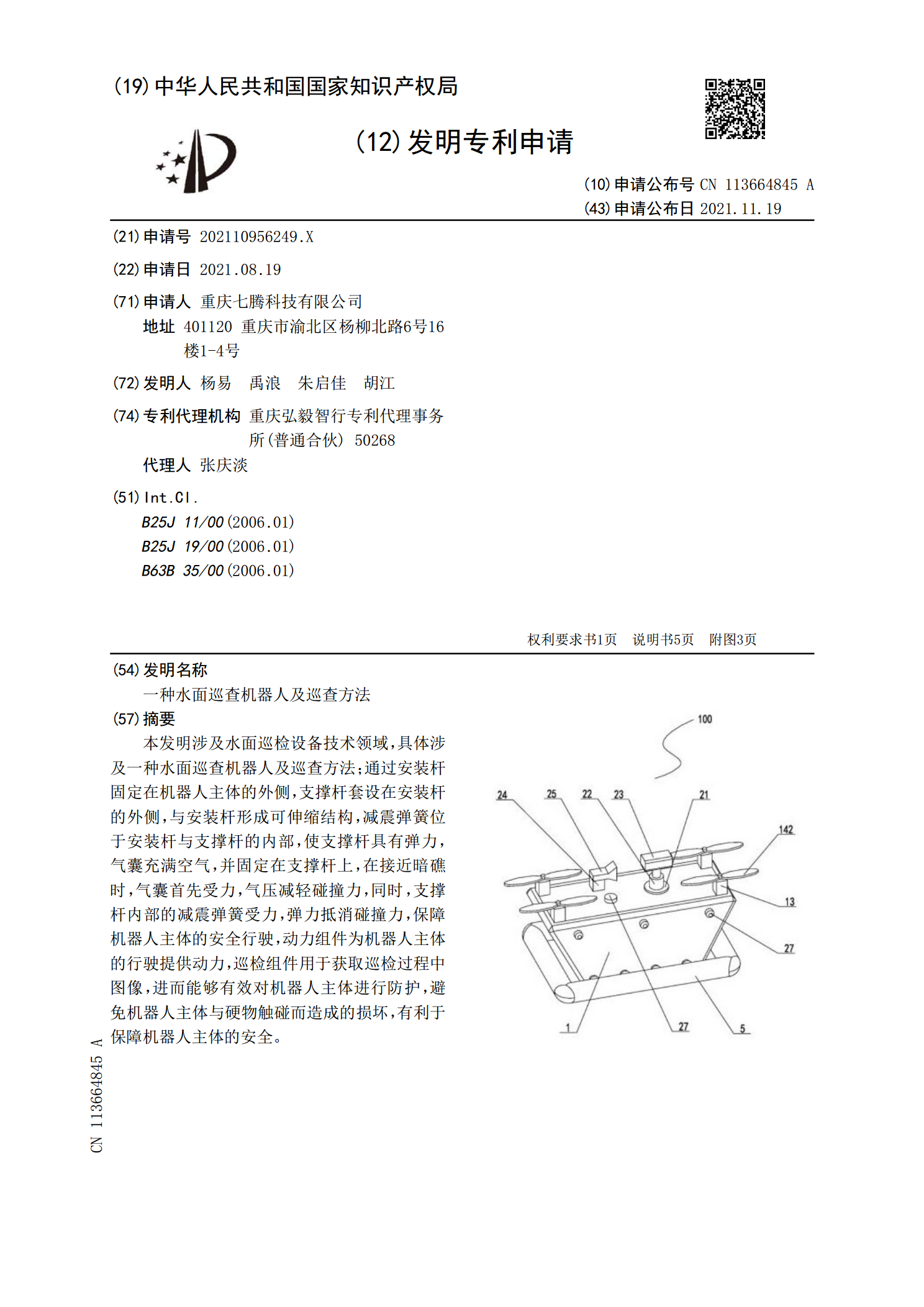
本发明涉及水面巡检设备技术领域,具体涉及一种水面巡查机器人及巡查方法;通过安装杆固定在机器人主体的外侧,支撑杆套设在安装杆的外侧,与安装杆形成可伸缩结构,减震弹簧位于安装杆与支撑杆的内部,使支撑杆具有弹力,气囊充满空气,并固定在支撑杆上,在接近暗礁时,气囊首先受力,气压减轻碰撞力,同时,支撑杆内部的减震弹簧受力,弹力抵消碰撞力,保障机器人主体的安全行驶,动力组件为机器人主体的行驶提供动力,巡检组件用于获取巡检过程中图像,进而能够有效对机器人主体进行防护,避免机器人主体与硬物触碰而造成的损坏,有利于保障机器
一种悬挂式单轨检测机器人及悬挂式单轨检测方法.pdf
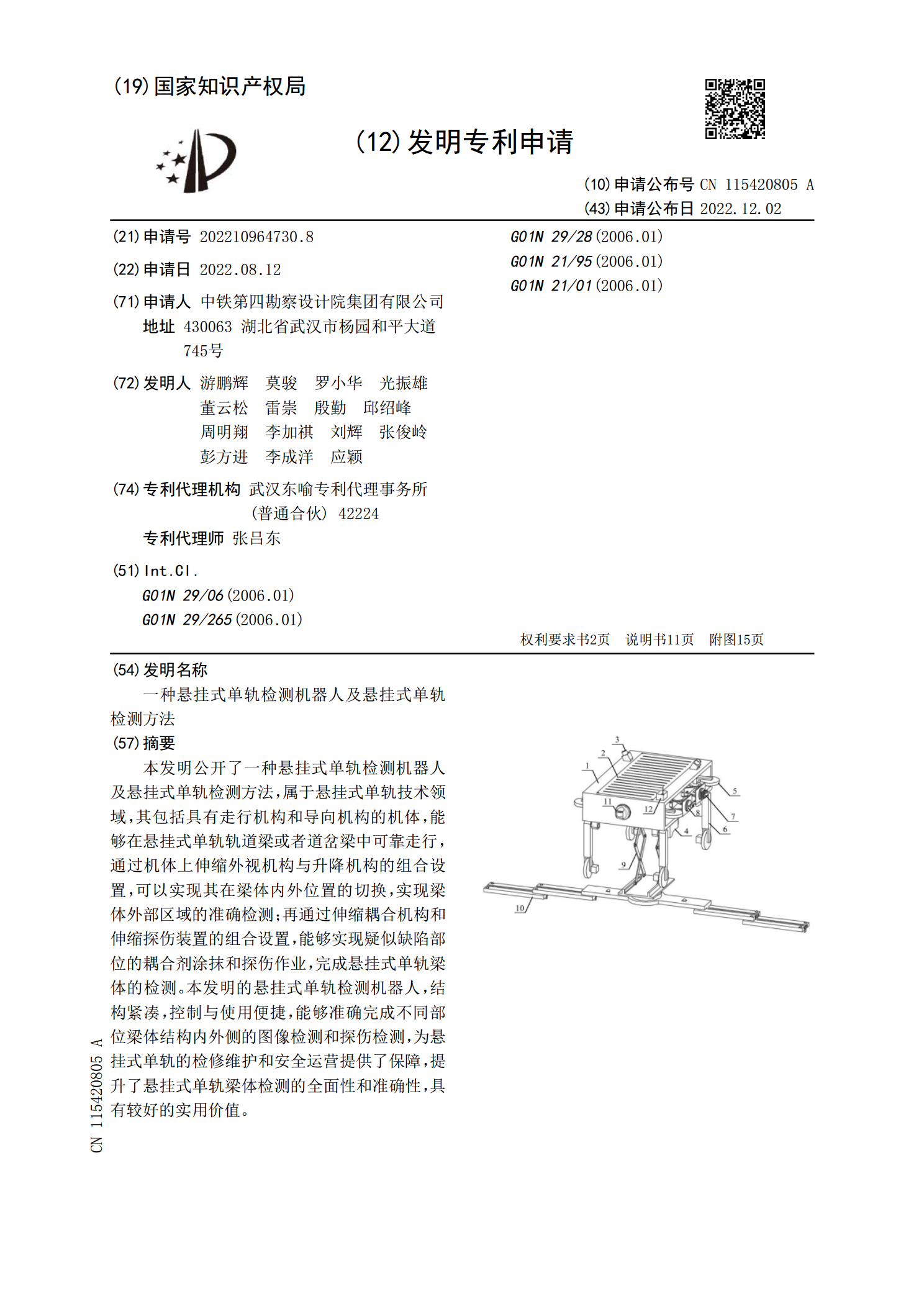
本发明公开了一种悬挂式单轨检测机器人及悬挂式单轨检测方法,属于悬挂式单轨技术领域,其包括具有走行机构和导向机构的机体,能够在悬挂式单轨轨道梁或者道岔梁中可靠走行,通过机体上伸缩外视机构与升降机构的组合设置,可以实现其在梁体内外位置的切换,实现梁体外部区域的准确检测;再通过伸缩耦合机构和伸缩探伤装置的组合设置,能够实现疑似缺陷部位的耦合剂涂抹和探伤作业,完成悬挂式单轨梁体的检测。本发明的悬挂式单轨检测机器人,结构紧凑,控制与使用便捷,能够准确完成不同部位梁体结构内外侧的图像检测和探伤检测,为悬挂式单轨的检修
一种悬挂式巡检机器人控制方法.pdf
本发明公开了一种悬挂式巡检机器人控制方法,应用在悬挂式巡检机器人上,其特征在于,包括如下步骤:处理器获取所述悬挂式巡检机器人的行走类型;以及根据所述行走类型,切换至与所述行走类型相应的行走机构控制模式。本发明提供的悬挂式巡检机器人的控制方法可以根据巡检作业环境选择齿轮齿条啮合行走或者滚轮导轨滑动行走模式,根据巡检作业环境阻力控制悬挂式巡检机器人克服因天气和地形造成的高空巡检风阻大、低空巡检风阻小的环境阻碍,实现对于悬挂式巡检机器人的通用性使用。
一种单丝悬挂扭摆的悬挂装置及单丝悬挂扭摆.pdf
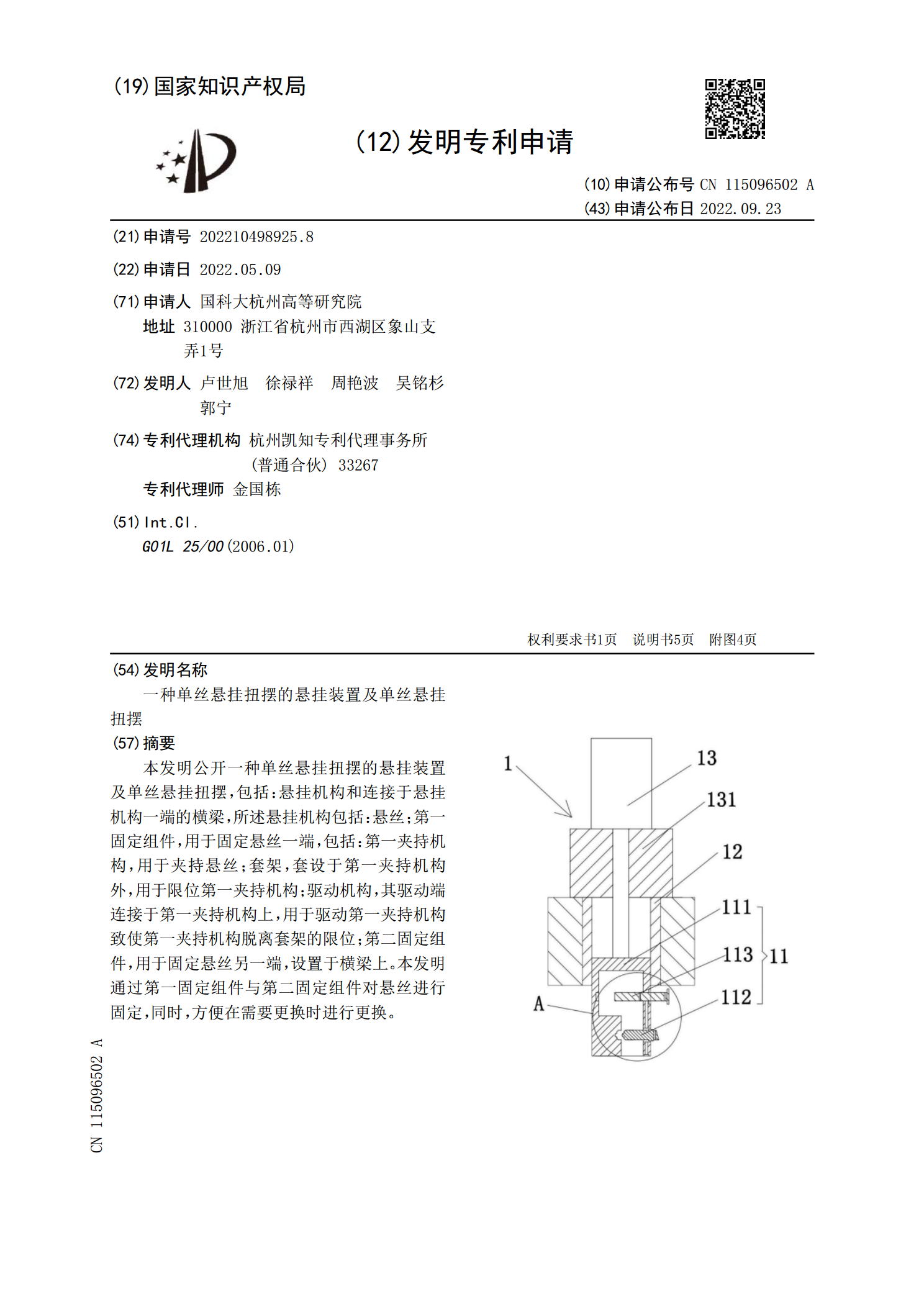
本发明公开一种单丝悬挂扭摆的悬挂装置及单丝悬挂扭摆,包括:悬挂机构和连接于悬挂机构一端的横梁,所述悬挂机构包括:悬丝;第一固定组件,用于固定悬丝一端,包括:第一夹持机构,用于夹持悬丝;套架,套设于第一夹持机构外,用于限位第一夹持机构;驱动机构,其驱动端连接于第一夹持机构上,用于驱动第一夹持机构致使第一夹持机构脱离套架的限位;第二固定组件,用于固定悬丝另一端,设置于横梁上。本发明通过第一固定组件与第二固定组件对悬丝进行固定,同时,方便在需要更换时进行更换。