
一种全自动水果采摘装置.pdf

一条****涛k

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种全自动水果采摘装置.pdf
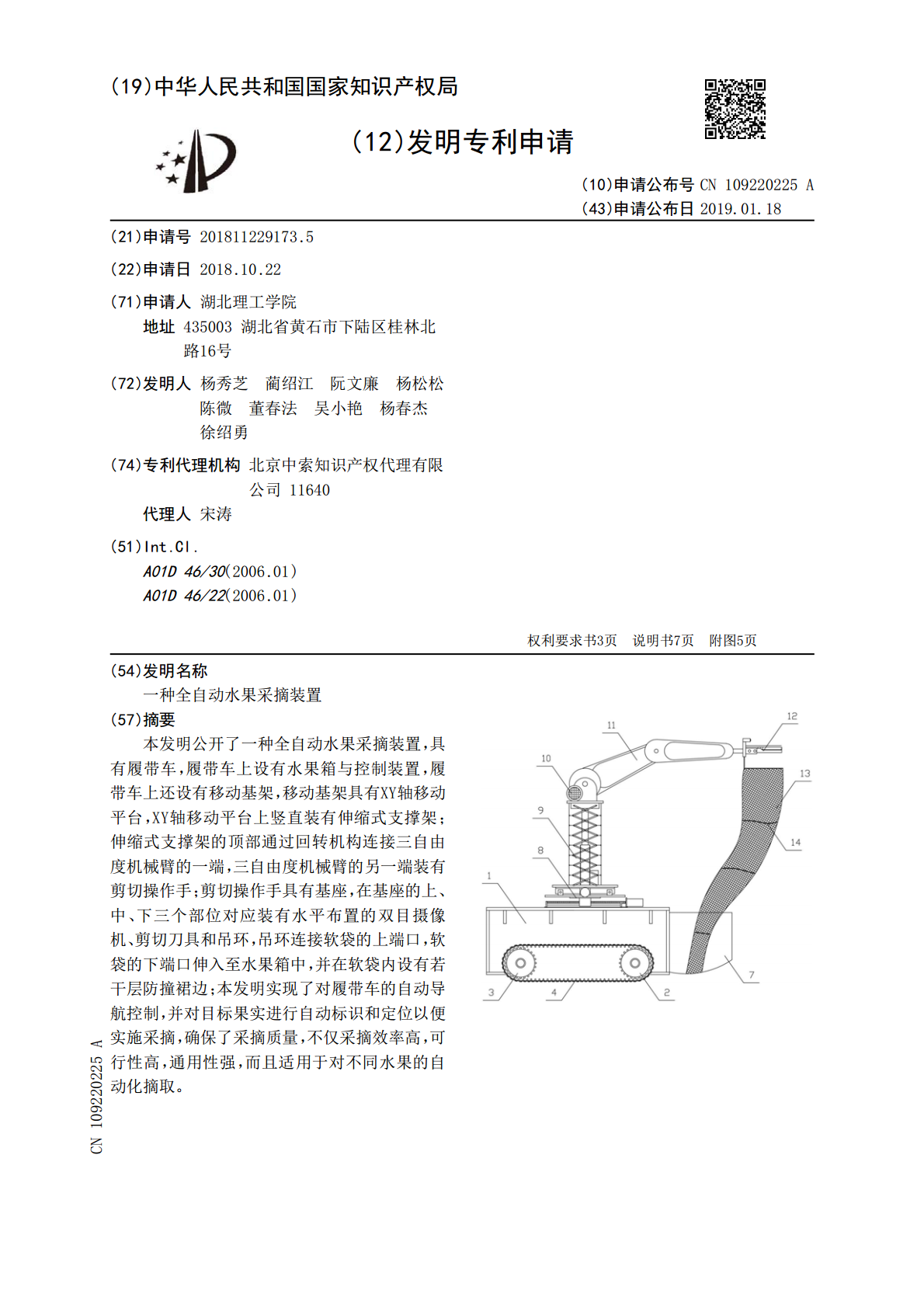
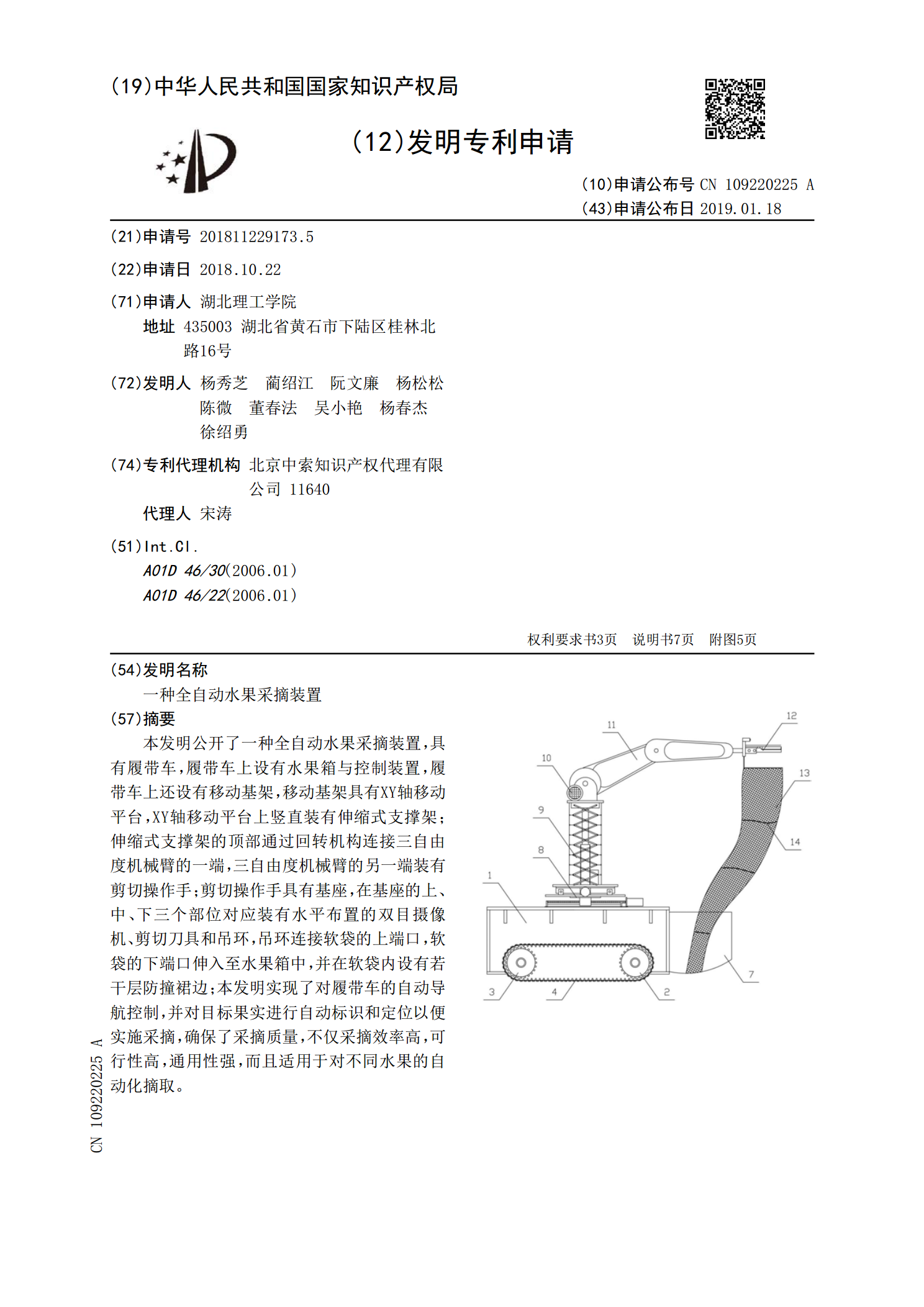
本发明公开了一种全自动水果采摘装置,具有履带车,履带车上设有水果箱与控制装置,履带车上还设有移动基架,移动基架具有XY轴移动平台,XY轴移动平台上竖直装有伸缩式支撑架;伸缩式支撑架的顶部通过回转机构连接三自由度机械臂的一端,三自由度机械臂的另一端装有剪切操作手;剪切操作手具有基座,在基座的上、中、下三个部位对应装有水平布置的双目摄像机、剪切刀具和吊环,吊环连接软袋的上端口,软袋的下端口伸入至水果箱中,并在软袋内设有若干层防撞裙边;本发明实现了对履带车的自动导航控制,并对目标果实进行自动标识和定位以便实施采
一种水果采摘用全自动橘子采摘装置.pdf
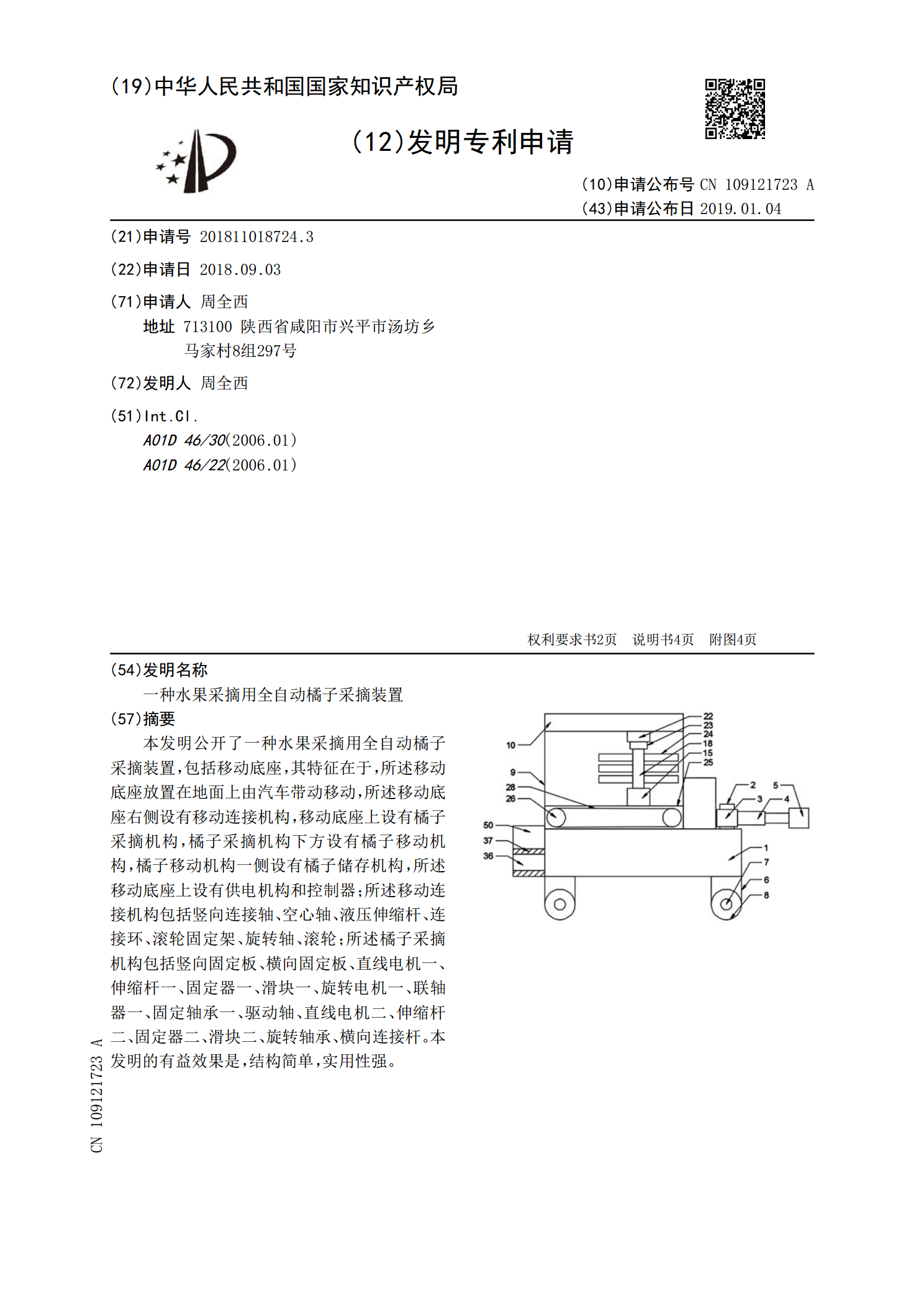
本发明公开了一种水果采摘用全自动橘子采摘装置,包括移动底座,其特征在于,所述移动底座放置在地面上由汽车带动移动,所述移动底座右侧设有移动连接机构,移动底座上设有橘子采摘机构,橘子采摘机构下方设有橘子移动机构,橘子移动机构一侧设有橘子储存机构,所述移动底座上设有供电机构和控制器;所述移动连接机构包括竖向连接轴、空心轴、液压伸缩杆、连接环、滚轮固定架、旋转轴、滚轮;所述橘子采摘机构包括竖向固定板、横向固定板、直线电机一、伸缩杆一、固定器一、滑块一、旋转电机一、联轴器一、固定轴承一、驱动轴、直线电机二、伸缩杆二
一种多功能全自动水果采摘装置.pdf
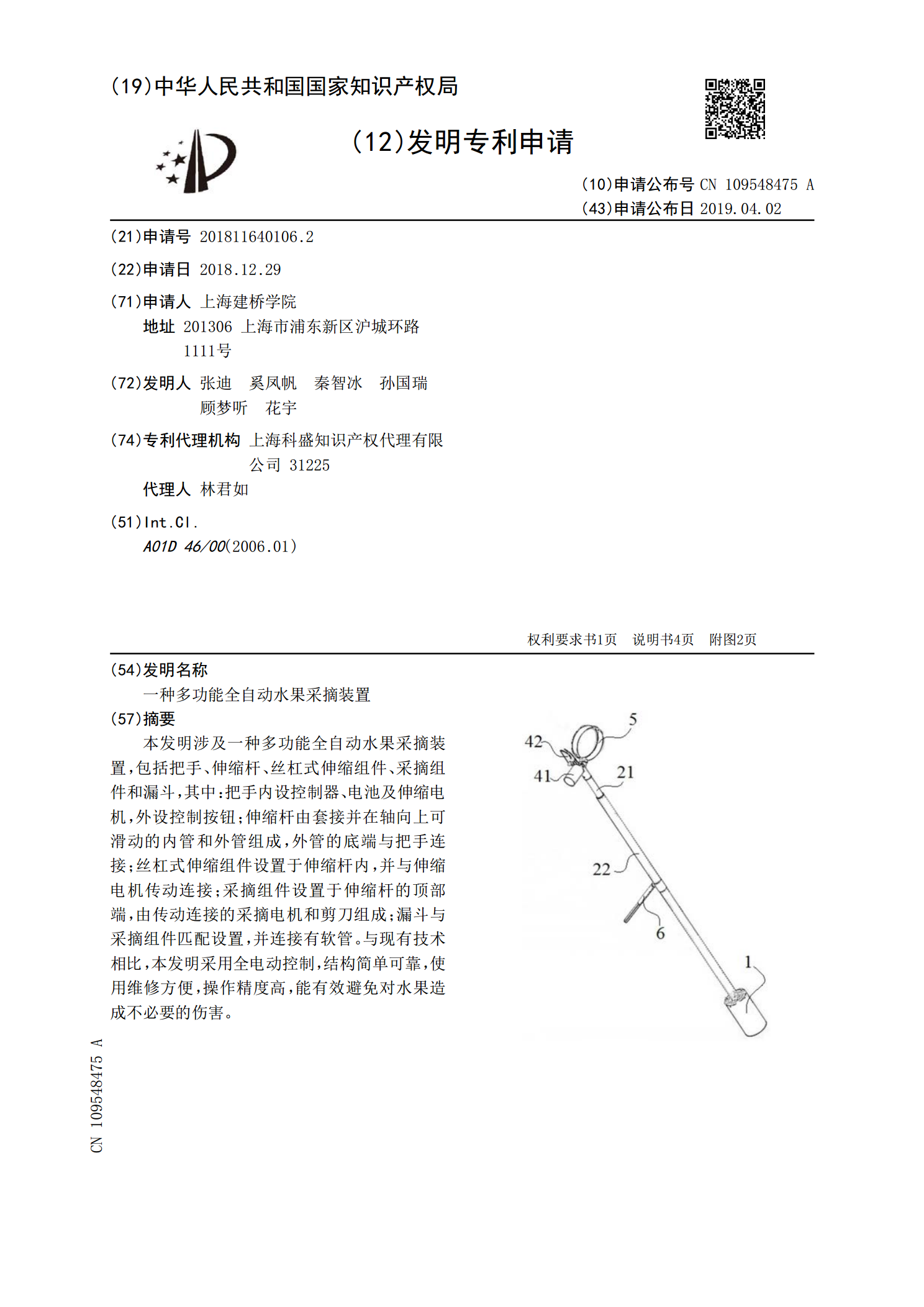
本实用新型涉及一种多功能全自动水果采摘装置,包括把手、伸缩杆、丝杠式伸缩组件、采摘组件和漏斗,其中:把手内设控制器、电池及伸缩电机,外设控制按钮;伸缩杆由套接并在轴向上可滑动的内管和外管组成,外管的底端与把手连接;丝杠式伸缩组件设置于伸缩杆内,并与伸缩电机传动连接;采摘组件设置于伸缩杆的顶部端,由传动连接的采摘电机和剪刀组成;漏斗与采摘组件匹配设置,并连接有软管。与现有技术相比,本实用新型采用全电动控制,结构简单可靠,使用维修方便,操作精度高,能有效避免对水果造成不必要的伤害。
一种水果采摘装置及水果采摘机器人.pdf
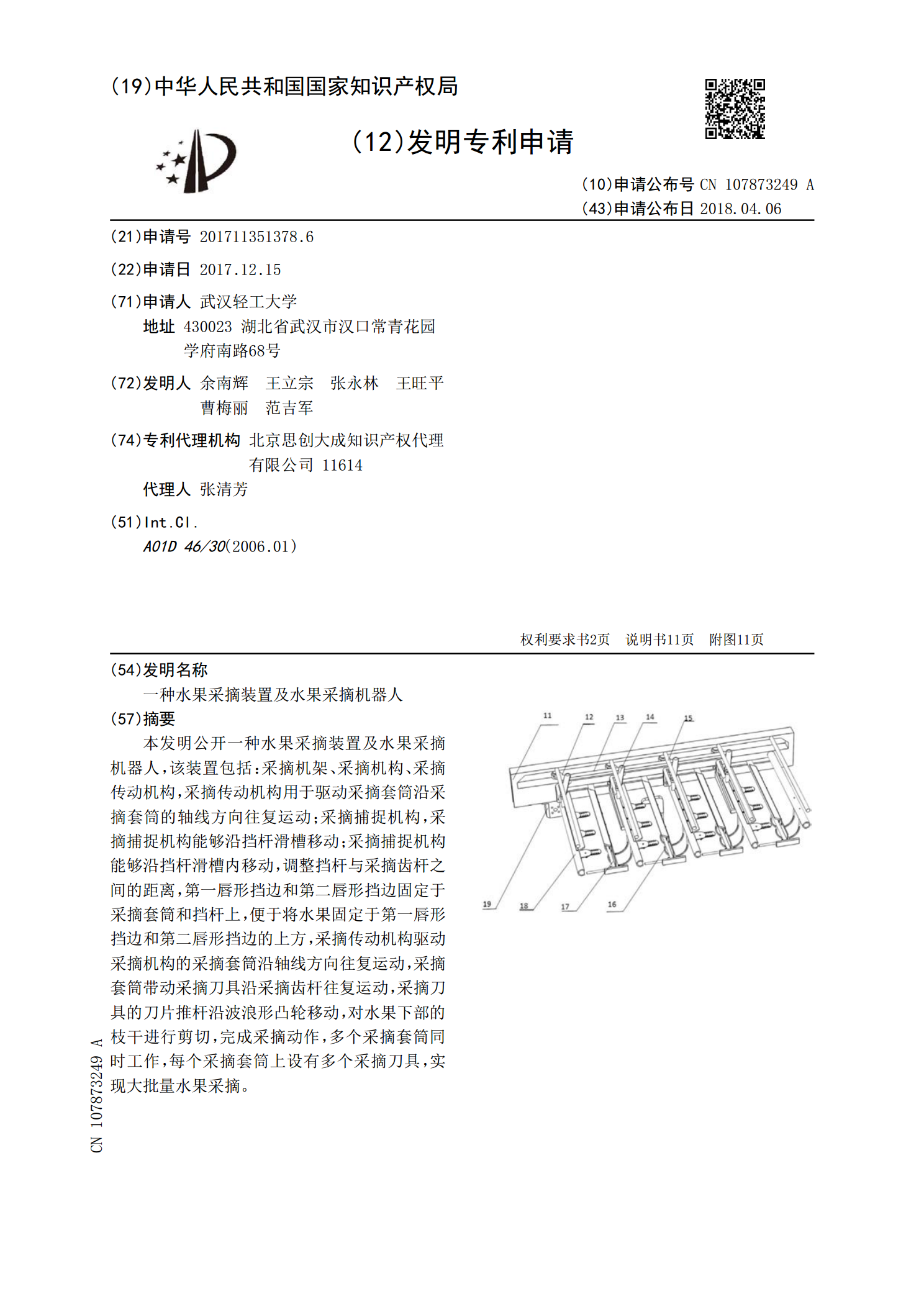
本发明公开一种水果采摘装置及水果采摘机器人,该装置包括:采摘机架、采摘机构、采摘传动机构,采摘传动机构用于驱动采摘套筒沿采摘套筒的轴线方向往复运动;采摘捕捉机构,采摘捕捉机构能够沿挡杆滑槽移动;采摘捕捉机构能够沿挡杆滑槽内移动,调整挡杆与采摘齿杆之间的距离,第一唇形挡边和第二唇形挡边固定于采摘套筒和挡杆上,便于将水果固定于第一唇形挡边和第二唇形挡边的上方,采摘传动机构驱动采摘机构的采摘套筒沿轴线方向往复运动,采摘套筒带动采摘刀具沿采摘齿杆往复运动,采摘刀具的刀片推杆沿波浪形凸轮移动,对水果下部的枝干进行剪
一种水果采摘装置及其水果采摘工作头.pdf
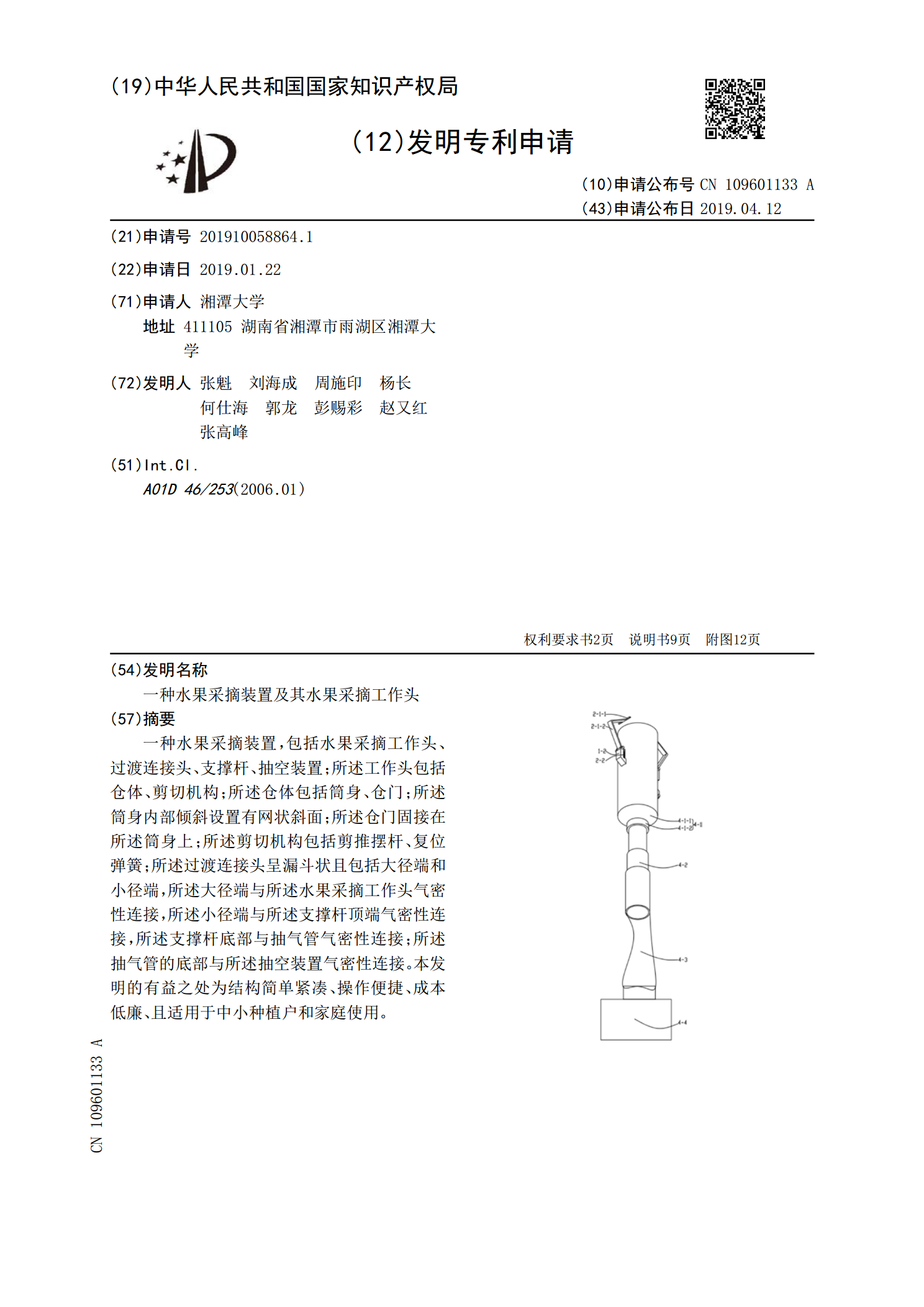
一种水果采摘装置,包括水果采摘工作头、过渡连接头、支撑杆、抽空装置;所述工作头包括仓体、剪切机构;所述仓体包括筒身、仓门;所述筒身内部倾斜设置有网状斜面;所述仓门固接在所述筒身上;所述剪切机构包括剪推摆杆、复位弹簧;所述过渡连接头呈漏斗状且包括大径端和小径端,所述大径端与所述水果采摘工作头气密性连接,所述小径端与所述支撑杆顶端气密性连接,所述支撑杆底部与抽气管气密性连接;所述抽气管的底部与所述抽空装置气密性连接。本发明的有益之处为结构简单紧凑、操作便捷、成本低廉、且适用于中小种植户和家庭使用。