
一种平稳运行的搬运机器人.pdf

是你****盟主


1/10

2/10
3/10

4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种平稳运行的搬运机器人.pdf
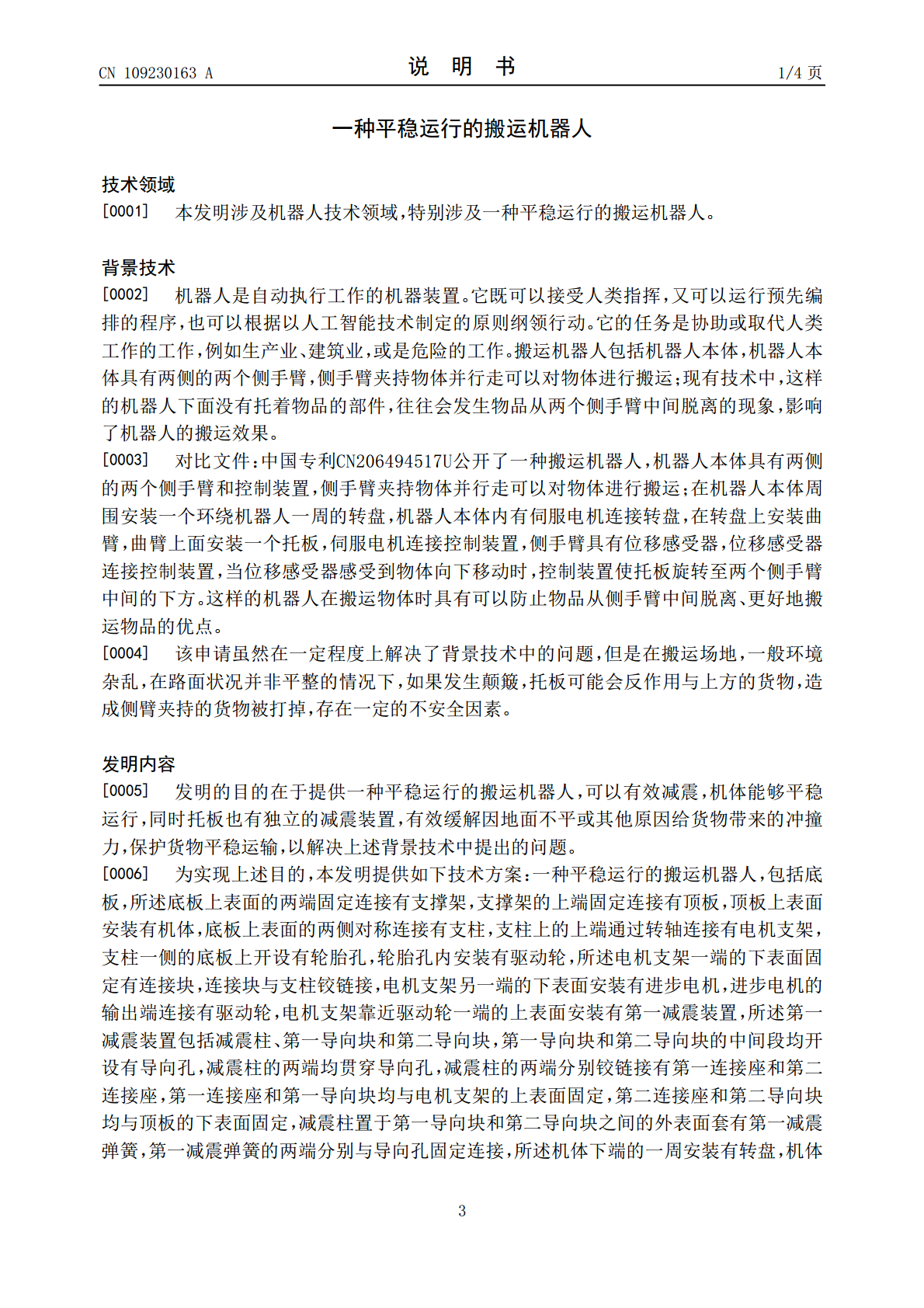
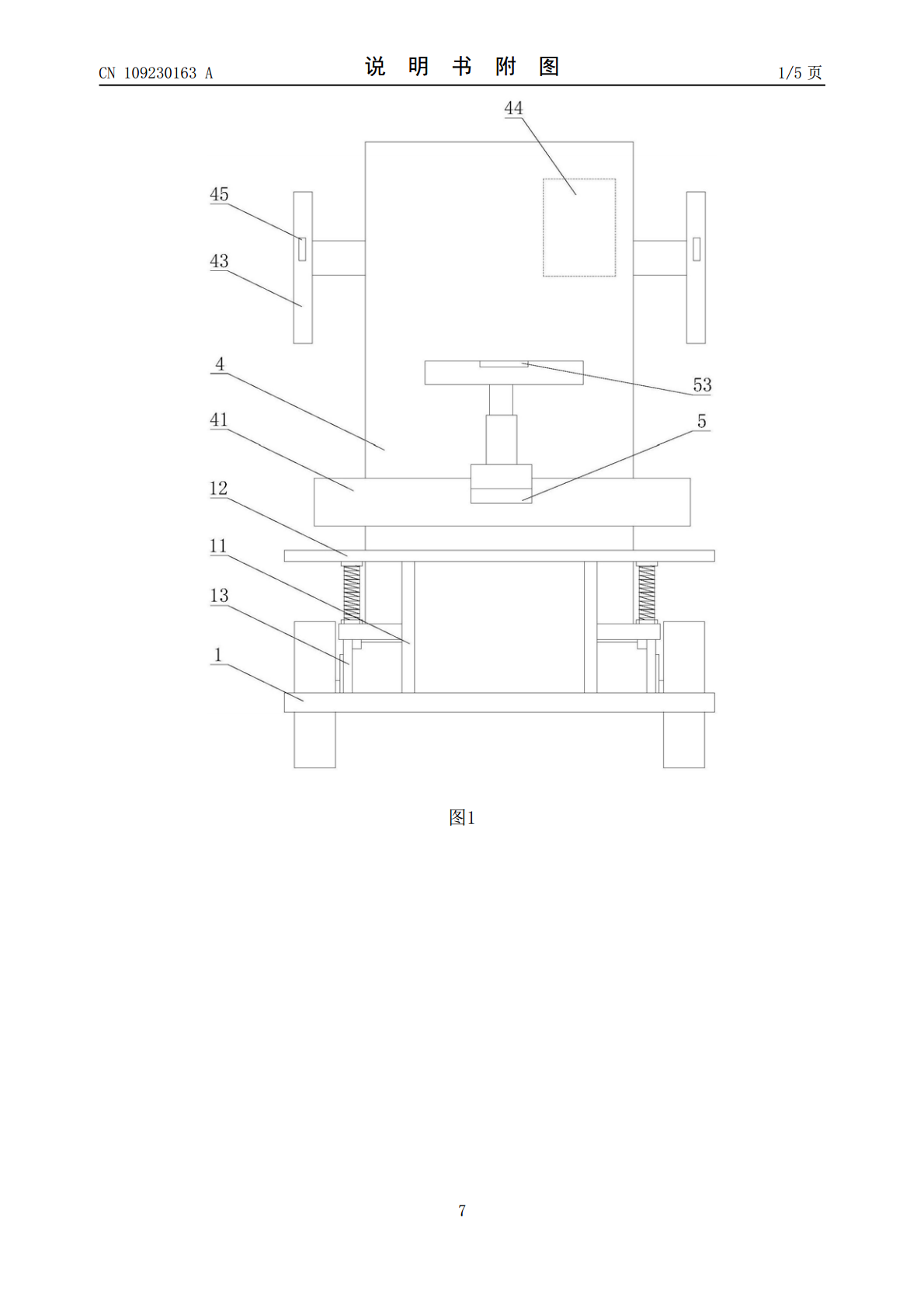
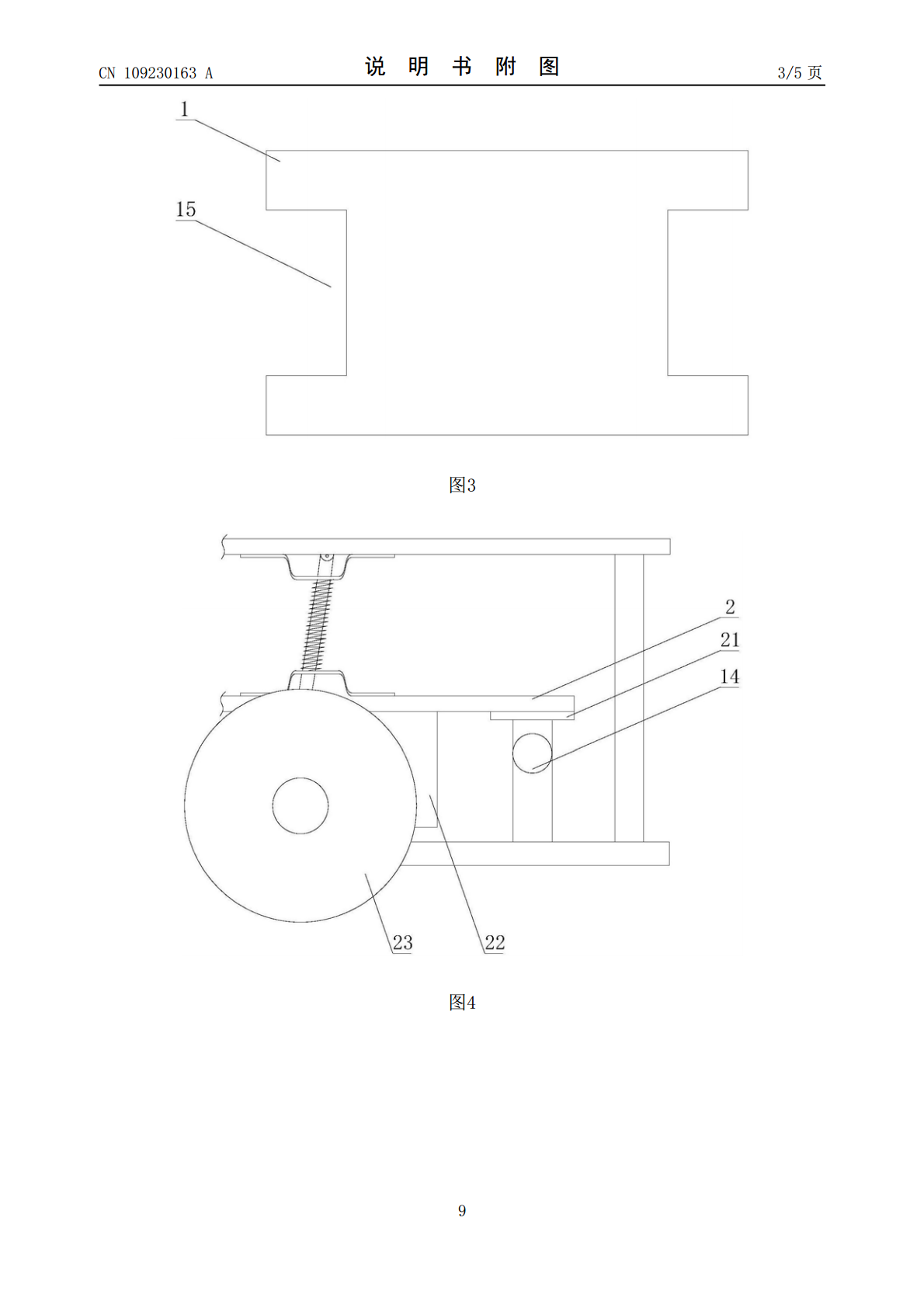
本发明公开了一种平稳运行的搬运机器人,包括底板,底板上表面的两端固定连接有支撑架,支撑架的上端固定连接有顶板,顶板上表面安装有机体,底板上表面的两侧对称连接有支柱,支柱上的上端通过转轴连接有电机支架,支柱一侧的底板上开设有轮胎孔,轮胎孔内安装有驱动轮,电机支架一端的下表面固定有连接块。本发明提出的平稳运行的搬运机器人,在机体的底部设有第一减震装置,通过电机支架与进步电机、驱动轮连接,驱动轮在遇到颠簸时,第一减震装置能有效减缓颠簸对顶板的冲击力,且第一减震弹簧与减震柱配合使用,避免单独使用弹簧产生回弹力对上

一种平稳运行的搬运小车.pdf
本发明公开了一种平稳运行的搬运小车,包括带车轮的车架,所述车架上设置有用于空瓶垛固定的固定装置,所述车架与固定装置之间设置有减震装置。本发明通过固定装置实现对空瓶垛的固定,减震装置用于减缓空瓶垛移动过程中的振动,具体的说,固定底座两侧机械臂上的机械抓手抓取空瓶垛,使用螺栓柱的旋转控制机械抓手的上下移动,使用带伸缩的连接杆控制机械抓手的左右移动并实现对空瓶垛的固定,通过平衡装置保持空瓶垛的稳定,防止了空瓶垛移动过程中发生空瓶损坏和空瓶垛的垮塌情况的发生,保证了空瓶装载的顺利进行。
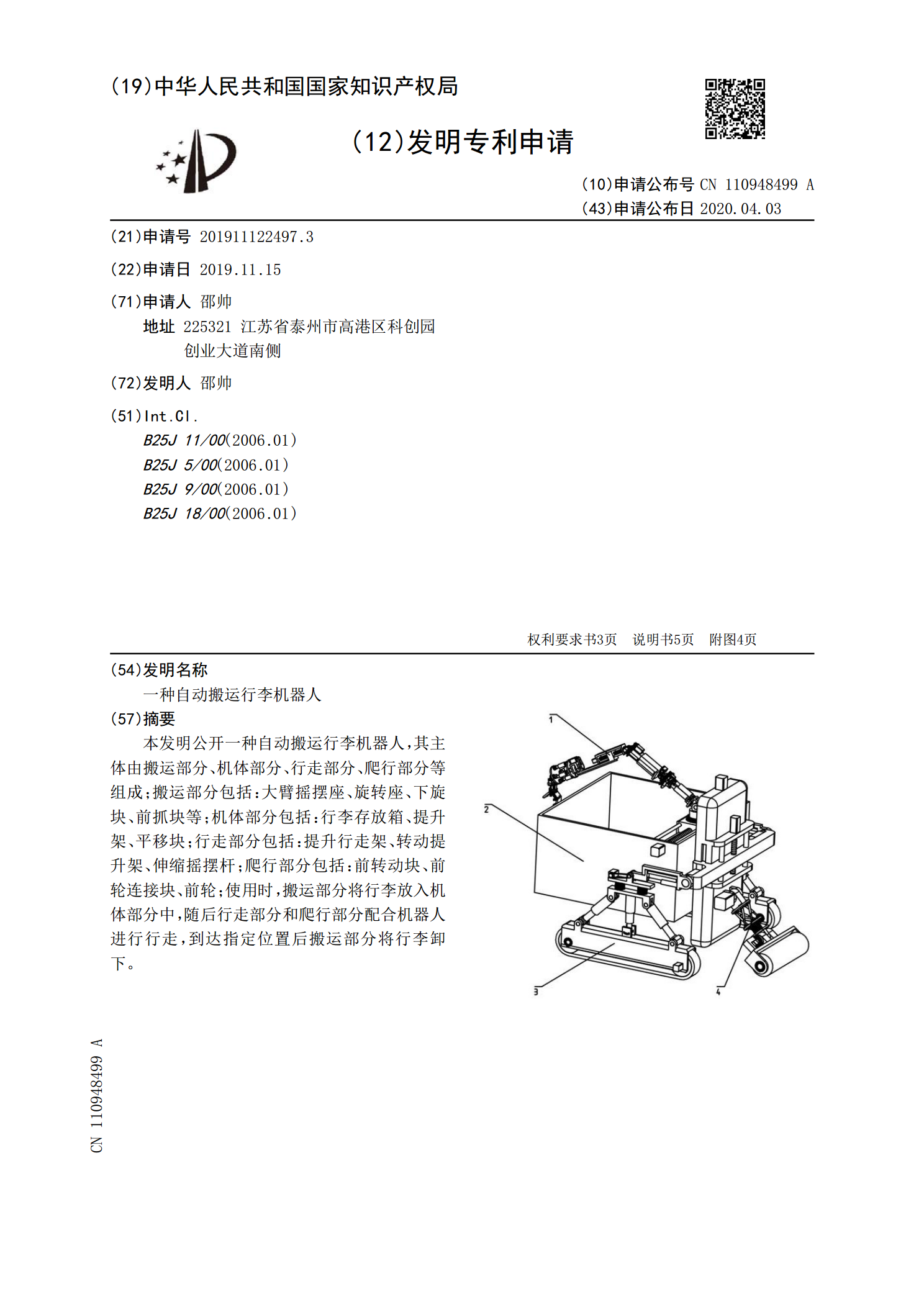
一种自动搬运行李机器人.pdf
本发明公开一种自动搬运行李机器人,其主体由搬运部分、机体部分、行走部分、爬行部分等组成;搬运部分包括:大臂摇摆座、旋转座、下旋块、前抓块等;机体部分包括:行李存放箱、提升架、平移块;行走部分包括:提升行走架、转动提升架、伸缩摇摆杆;爬行部分包括:前转动块、前轮连接块、前轮;使用时,搬运部分将行李放入机体部分中,随后行走部分和爬行部分配合机器人进行行走,到达指定位置后搬运部分将行李卸下。
一种基于2D轮式机器人的平稳搬运目标物体的方法.pdf
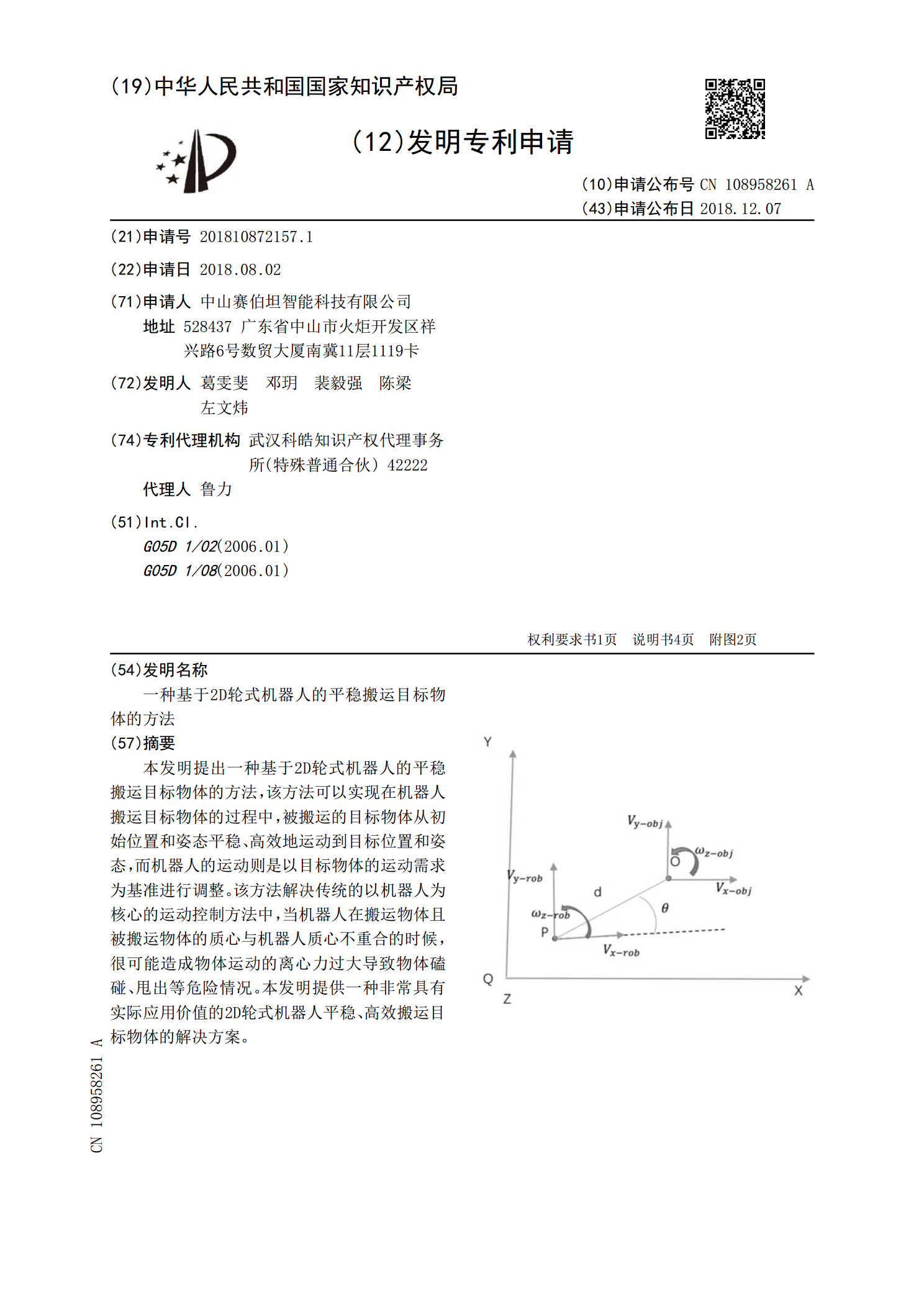
本发明提出一种基于2D轮式机器人的平稳搬运目标物体的方法,该方法可以实现在机器人搬运目标物体的过程中,被搬运的目标物体从初始位置和姿态平稳、高效地运动到目标位置和姿态,而机器人的运动则是以目标物体的运动需求为基准进行调整。该方法解决传统的以机器人为核心的运动控制方法中,当机器人在搬运物体且被搬运物体的质心与机器人质心不重合的时候,很可能造成物体运动的离心力过大导致物体磕碰、甩出等危险情况。本发明提供一种非常具有实际应用价值的2D轮式机器人平稳、高效搬运目标物体的解决方案。

搬运机器人运行控制方法、装置及机器人.pdf
本发明公开了一种搬运机器人运行控制方法、装置及机器人,涉及机器人技术领域,其中的方法包括:根据左主动轮运行距离、右主动轮运行距离以及预定运行轨迹确定左主动轮跟随误差、右主动轮跟随误差,生成左主动轮位置调整指令和右主动轮位置调整指令,将左主动轮位置调整指令和右主动轮位置调整指令分别发送给第一伺服驱动系统和第二伺服驱动系统,减少运行偏差。本发明的方法、装置及机器人,基于左、右主动轮的跟随误差同时控制两台独立电机的运行,将电机的独立控制变成耦合控制,减小了各个电机的动态特性对于搬运机器人运行的影响,提高了搬运机