
一种自动搬运行李机器人.pdf

英瑞****写意


1/10

2/10
3/10
4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种自动搬运行李机器人.pdf
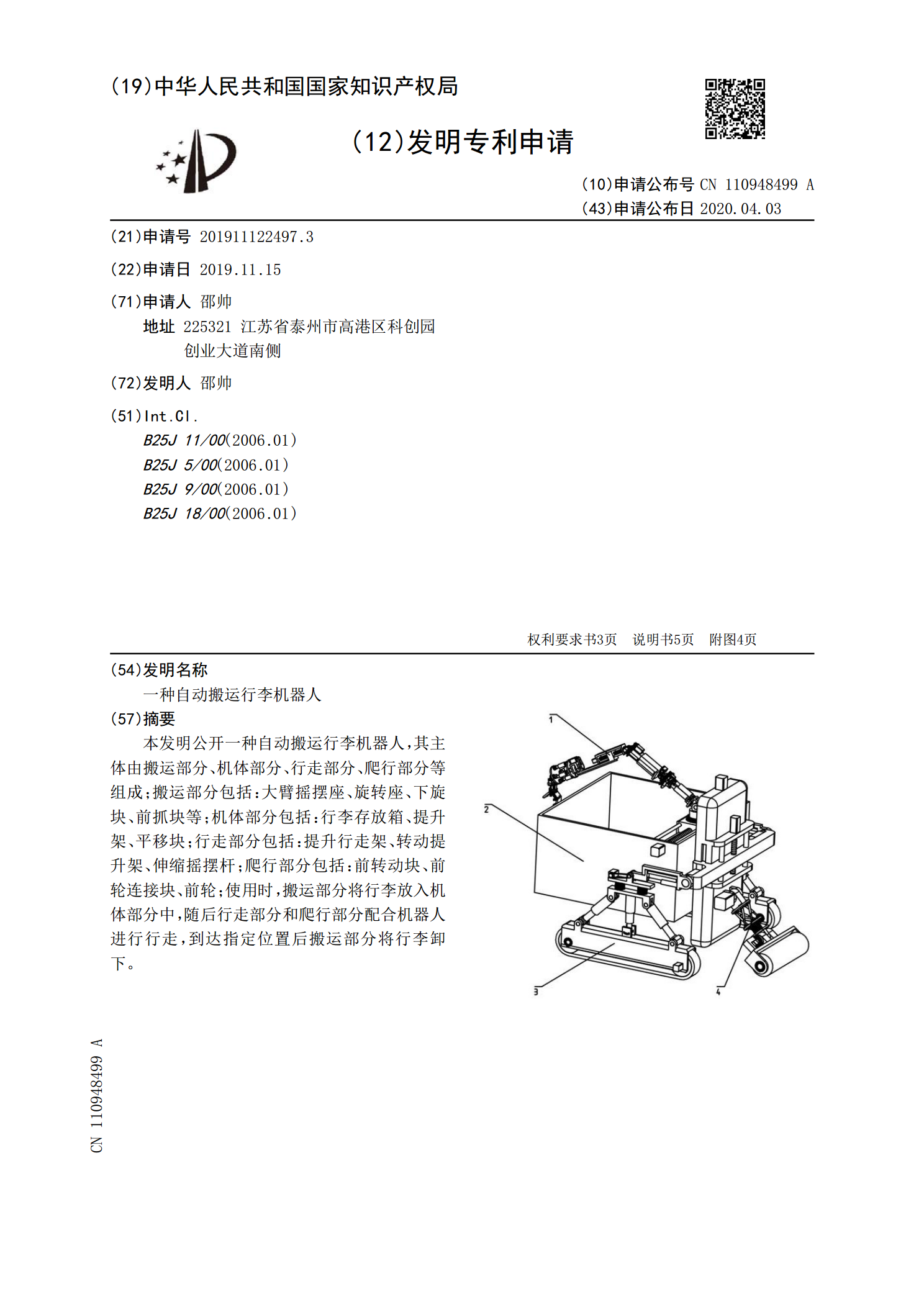
本发明公开一种自动搬运行李机器人,其主体由搬运部分、机体部分、行走部分、爬行部分等组成;搬运部分包括:大臂摇摆座、旋转座、下旋块、前抓块等;机体部分包括:行李存放箱、提升架、平移块;行走部分包括:提升行走架、转动提升架、伸缩摇摆杆;爬行部分包括:前转动块、前轮连接块、前轮;使用时,搬运部分将行李放入机体部分中,随后行走部分和爬行部分配合机器人进行行走,到达指定位置后搬运部分将行李卸下。

一种贴身行李自动搬运机器人.pdf
本发明涉及一种贴身行李自动搬运机器人,该搬运机器人包括行李箱底座、行李箱体和拉杆;还设有两个驱动轮和两个从动轮,两个驱动轮和两个从动轮分别安装在行李箱底座的前部及后部两侧,并且每个轮的上方均安装有一个轮罩;在所述行李箱底座内还设有用于驱动驱动轮转动的驱动电机、电机控制板以及用于供电的蓄电池。本发明可以实现人工遥控或自动控制,可以按照旅客的具体要求自主完成固定路线引导、行李搬运等功能,可以连成串,遥控、自控行李到行李舱,既安全又快捷,能够进一步简化乘机手续,方便民航旅客出行。同时将行李箱盖合在行李箱体上,可

一种机场行李搬运机器人.pdf
本发明公开了一种机场行李搬运机器人,包括:储尘室、移动装置、吸尘装置、控制装置、储物柜、延伸板和行走装置;在所述储尘室的底端前侧设置移动装置;在所述储尘室的后端设置滚轮;在所述滚轮和移动装置之间的储尘室上设置吸尘装置,且吸尘装置与储尘室之间相配合运用;在所述吸尘装置的底端设置吸尘口;在所述储尘室的上端设置储物柜;在所述储物柜前端的储尘室上设置控制装置;在所述控制装置设置的上端设置把手;在所述储尘室的后端设置延伸板,且储尘室与延伸板之间滑动连接;在所述延伸板的底端后侧设置行走装置。本装置设计合理,操作便利,
一种智能行李搬运机器人.pdf
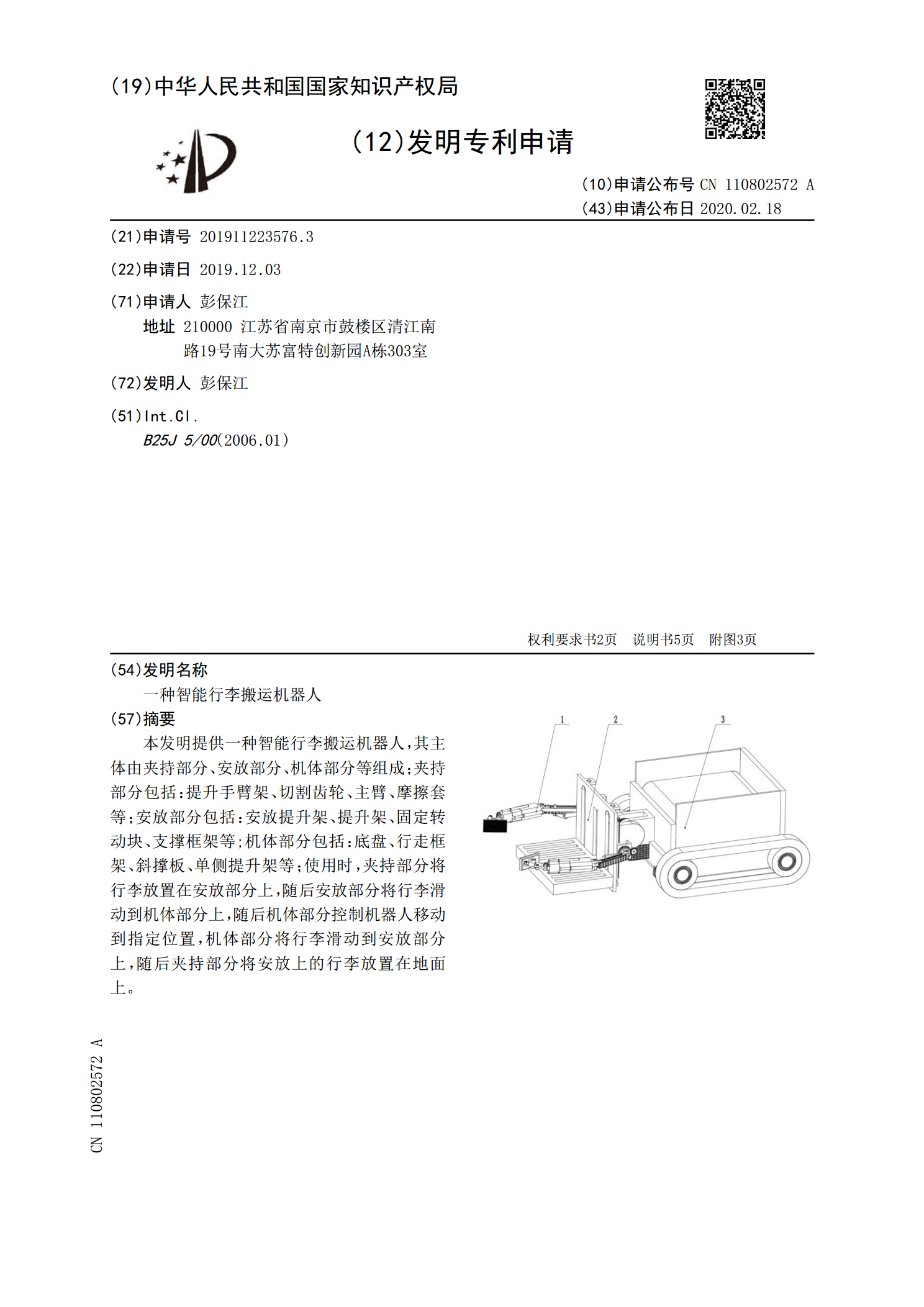
本发明提供一种智能行李搬运机器人,其主体由夹持部分、安放部分、机体部分等组成;夹持部分包括:提升手臂架、切割齿轮、主臂、摩擦套等;安放部分包括:安放提升架、提升架、固定转动块、支撑框架等;机体部分包括:底盘、行走框架、斜撑板、单侧提升架等;使用时,夹持部分将行李放置在安放部分上,随后安放部分将行李滑动到机体部分上,随后机体部分控制机器人移动到指定位置,机体部分将行李滑动到安放部分上,随后夹持部分将安放上的行李放置在地面上。
一种自动跟随行李搬运车.pdf
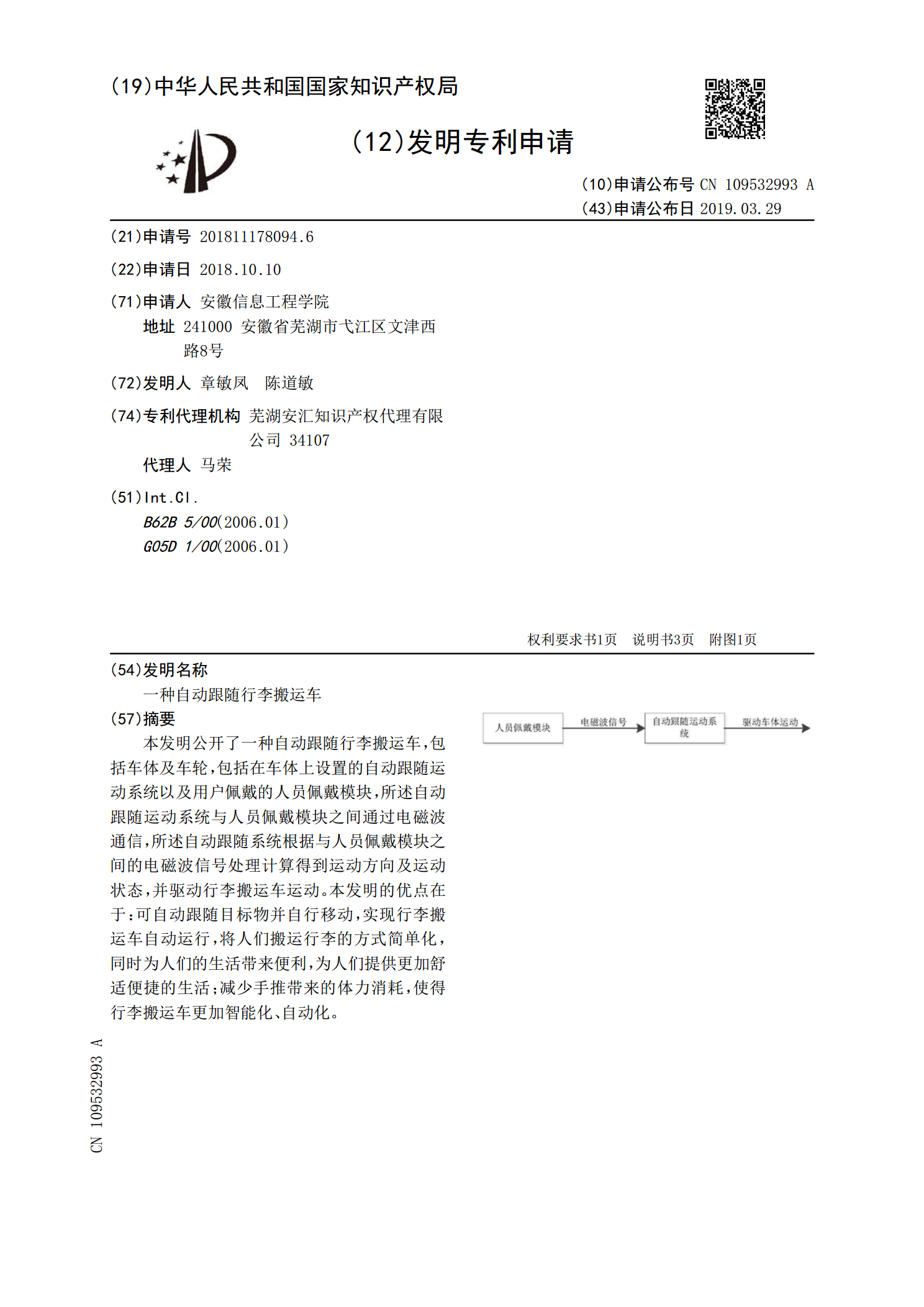
本发明公开了一种自动跟随行李搬运车,包括车体及车轮,包括在车体上设置的自动跟随运动系统以及用户佩戴的人员佩戴模块,所述自动跟随运动系统与人员佩戴模块之间通过电磁波通信,所述自动跟随系统根据与人员佩戴模块之间的电磁波信号处理计算得到运动方向及运动状态,并驱动行李搬运车运动。本发明的优点在于:可自动跟随目标物并自行移动,实现行李搬运车自动运行,将人们搬运行李的方式简单化,同时为人们的生活带来便利,为人们提供更加舒适便捷的生活;减少手推带来的体力消耗,使得行李搬运车更加智能化、自动化。