
一种吸料机构.pdf

骊英****bb

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种吸料机构.pdf
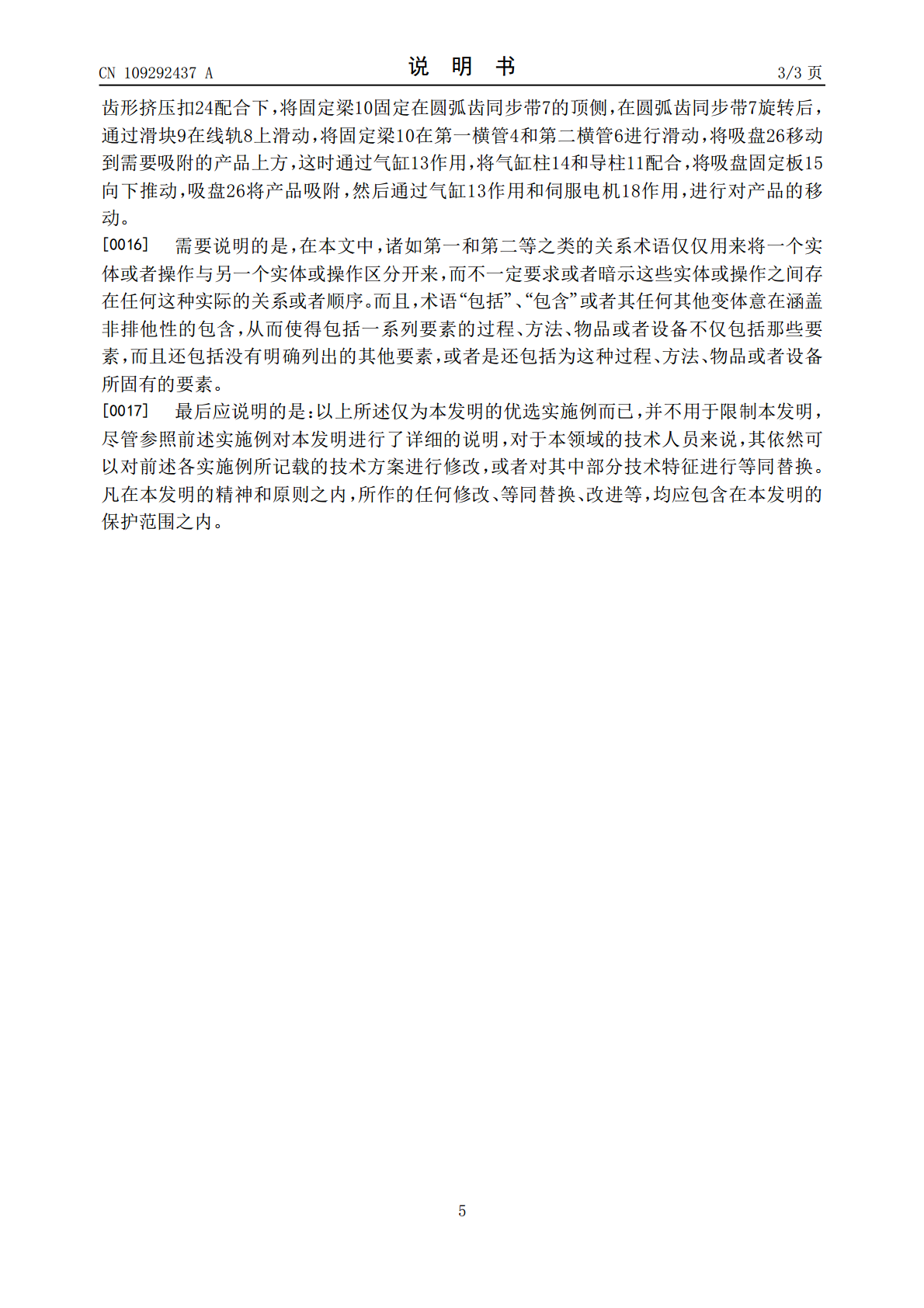
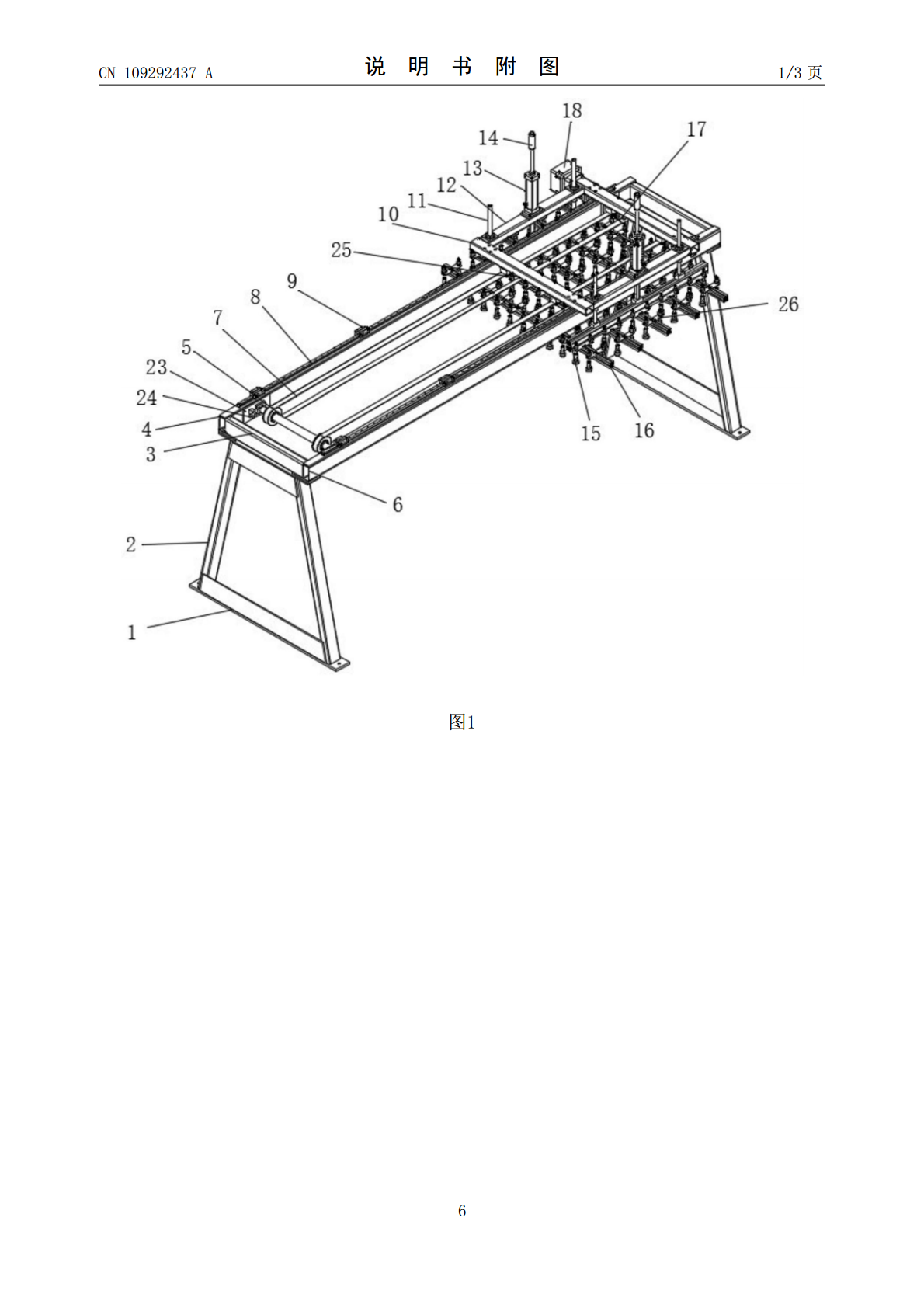
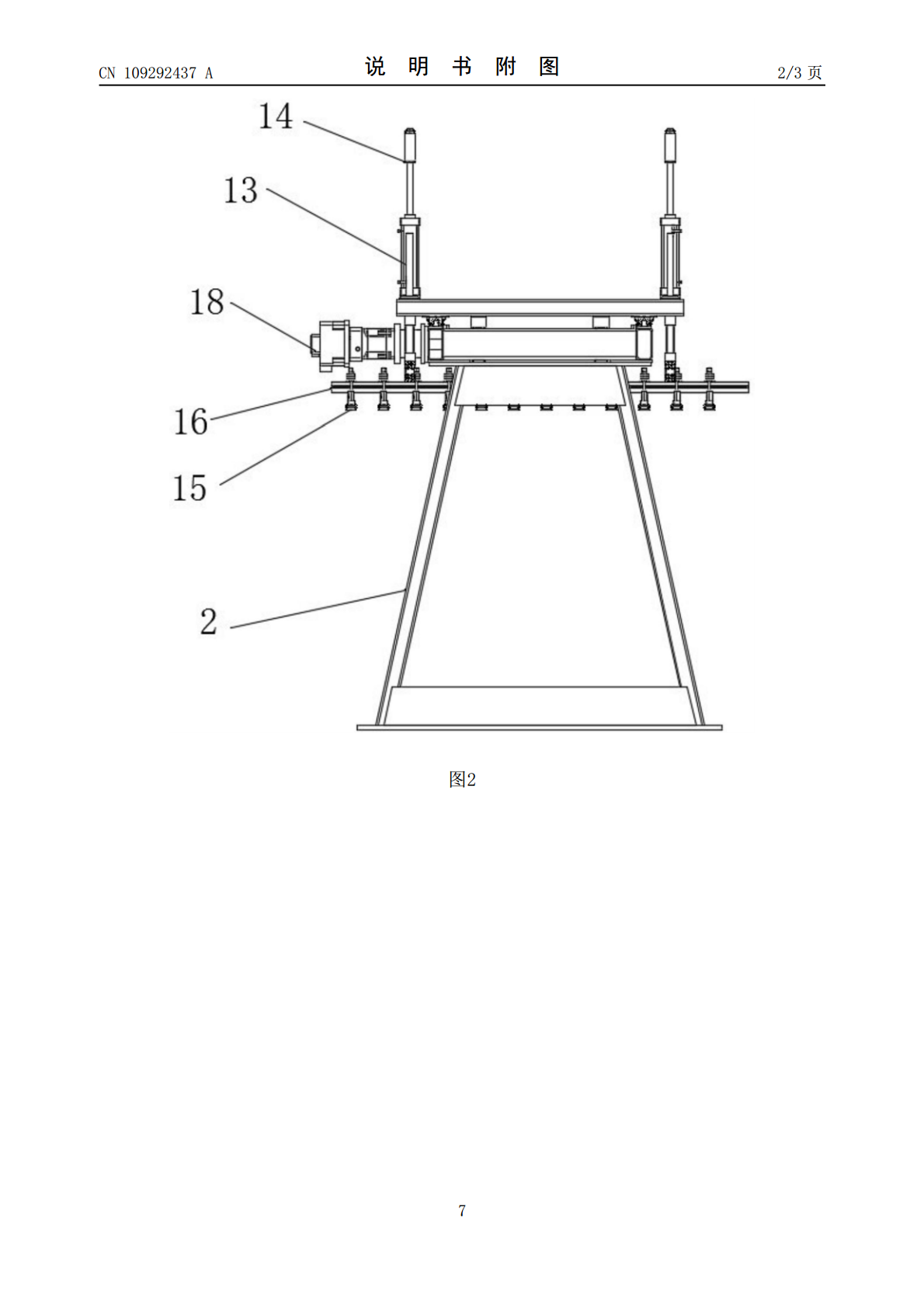
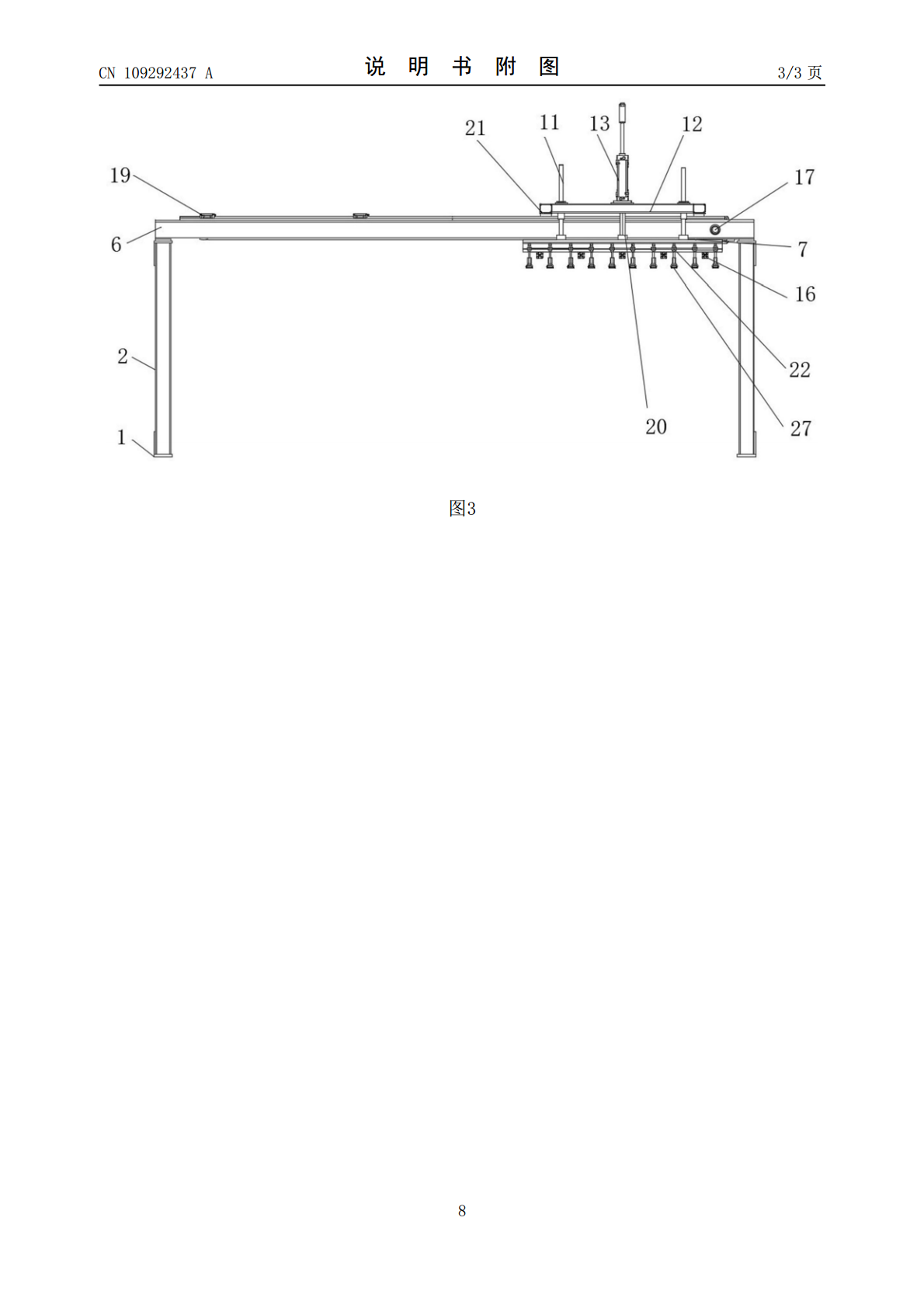
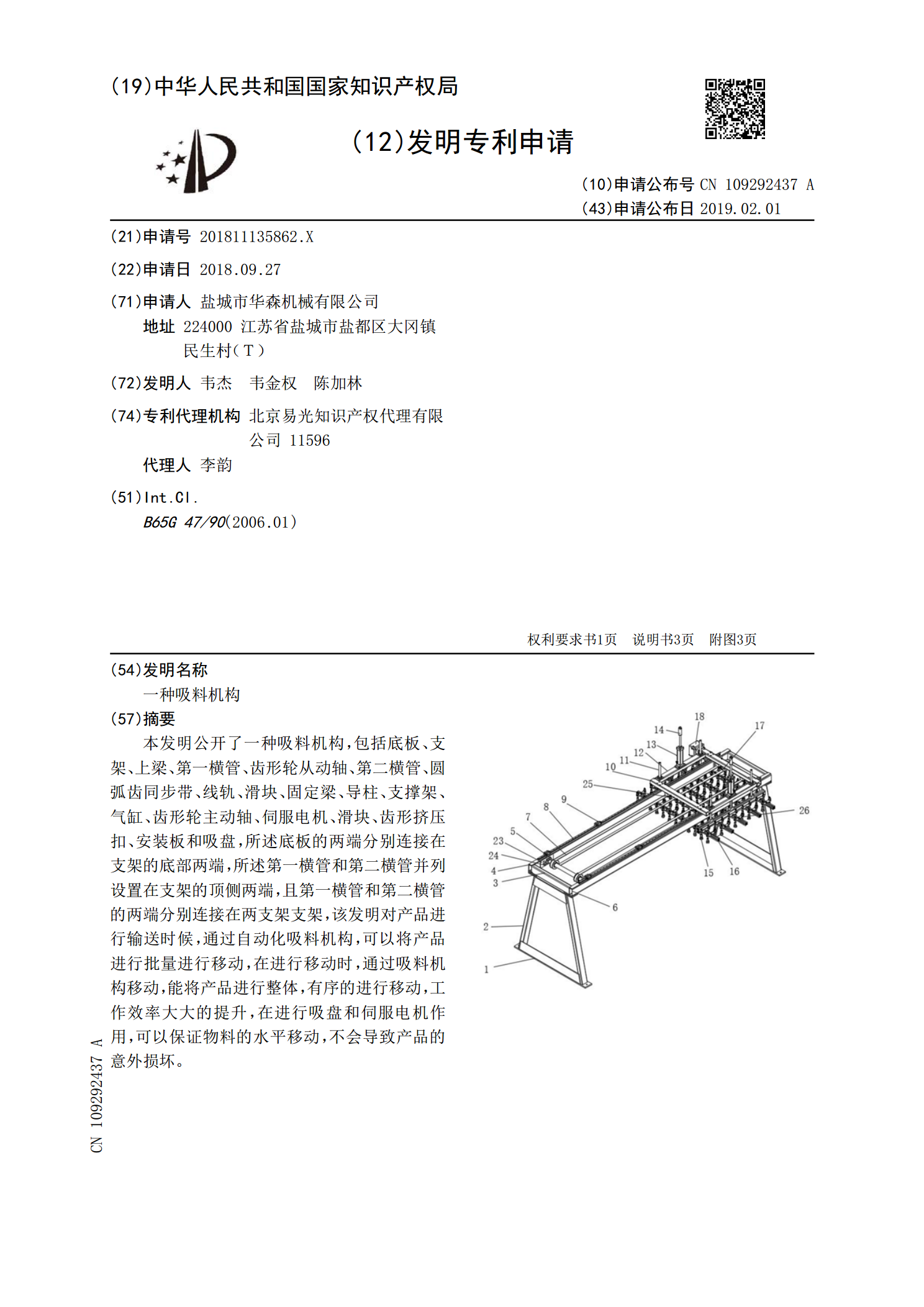
本发明公开了一种吸料机构,包括底板、支架、上梁、第一横管、齿形轮从动轴、第二横管、圆弧齿同步带、线轨、滑块、固定梁、导柱、支撑架、气缸、齿形轮主动轴、伺服电机、滑块、齿形挤压扣、安装板和吸盘,所述底板的两端分别连接在支架的底部两端,所述第一横管和第二横管并列设置在支架的顶侧两端,且第一横管和第二横管的两端分别连接在两支架支架,该发明对产品进行输送时候,通过自动化吸料机构,可以将产品进行批量进行移动,在进行移动时,通过吸料机构移动,能将产品进行整体,有序的进行移动,工作效率大大的提升,在进行吸盘和伺服电机作
吸料机构及吸料装置.pdf
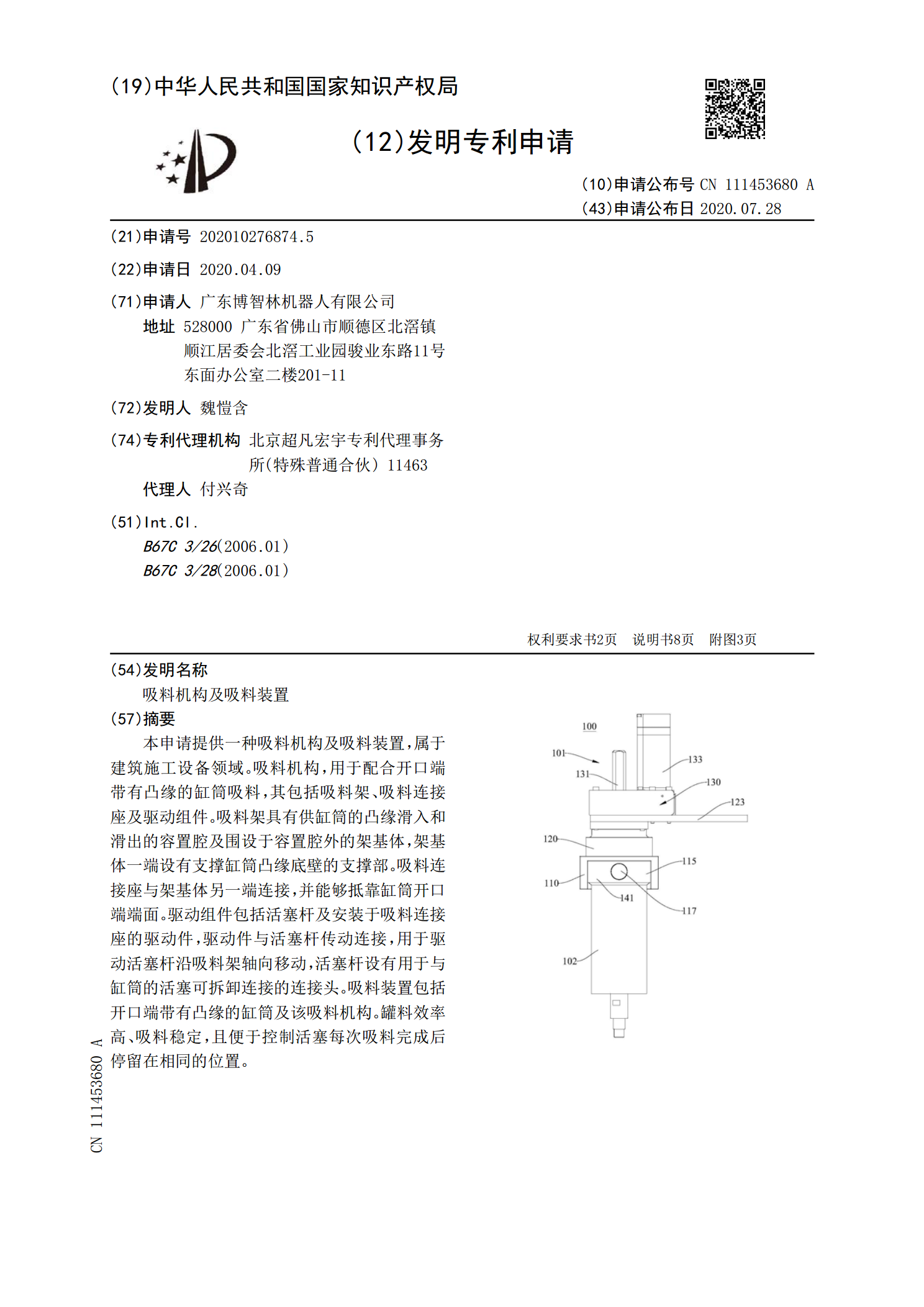
本申请提供一种吸料机构及吸料装置,属于建筑施工设备领域。吸料机构,用于配合开口端带有凸缘的缸筒吸料,其包括吸料架、吸料连接座及驱动组件。吸料架具有供缸筒的凸缘滑入和滑出的容置腔及围设于容置腔外的架基体,架基体一端设有支撑缸筒凸缘底壁的支撑部。吸料连接座与架基体另一端连接,并能够抵靠缸筒开口端端面。驱动组件包括活塞杆及安装于吸料连接座的驱动件,驱动件与活塞杆传动连接,用于驱动活塞杆沿吸料架轴向移动,活塞杆设有用于与缸筒的活塞可拆卸连接的连接头。吸料装置包括开口端带有凸缘的缸筒及该吸料机构。罐料效率高、吸料稳

一种吸料机储料机构.pdf
本发明公开了一种吸料机储料机构,包括储料体、固定板、推拉机构,所述储料体的侧壁由上而下向内倾斜,为方形箱体或锥形桶状,固定板安装在储料体顶部,且留出进料缺口;储料体顶部正中的固定板上开有通孔,通孔内设置有夹持块,所述夹持块夹紧吸取管,限制其竖直方向的运动,所述推拉机构设置在储料体的腔体内部,高于粒料顶部,所述推拉机构的固定部安装在储料体的侧壁上,推拉部通过卡箍与吸取管铰接,铰接点位于吸取管伸入储料体的部分的中部,所述吸取管插入粒料且接近储料体底部,所述吸取管为弹簧胶管。本发明有效防止松脱,拆装方便;工作时
吸料机构.pdf
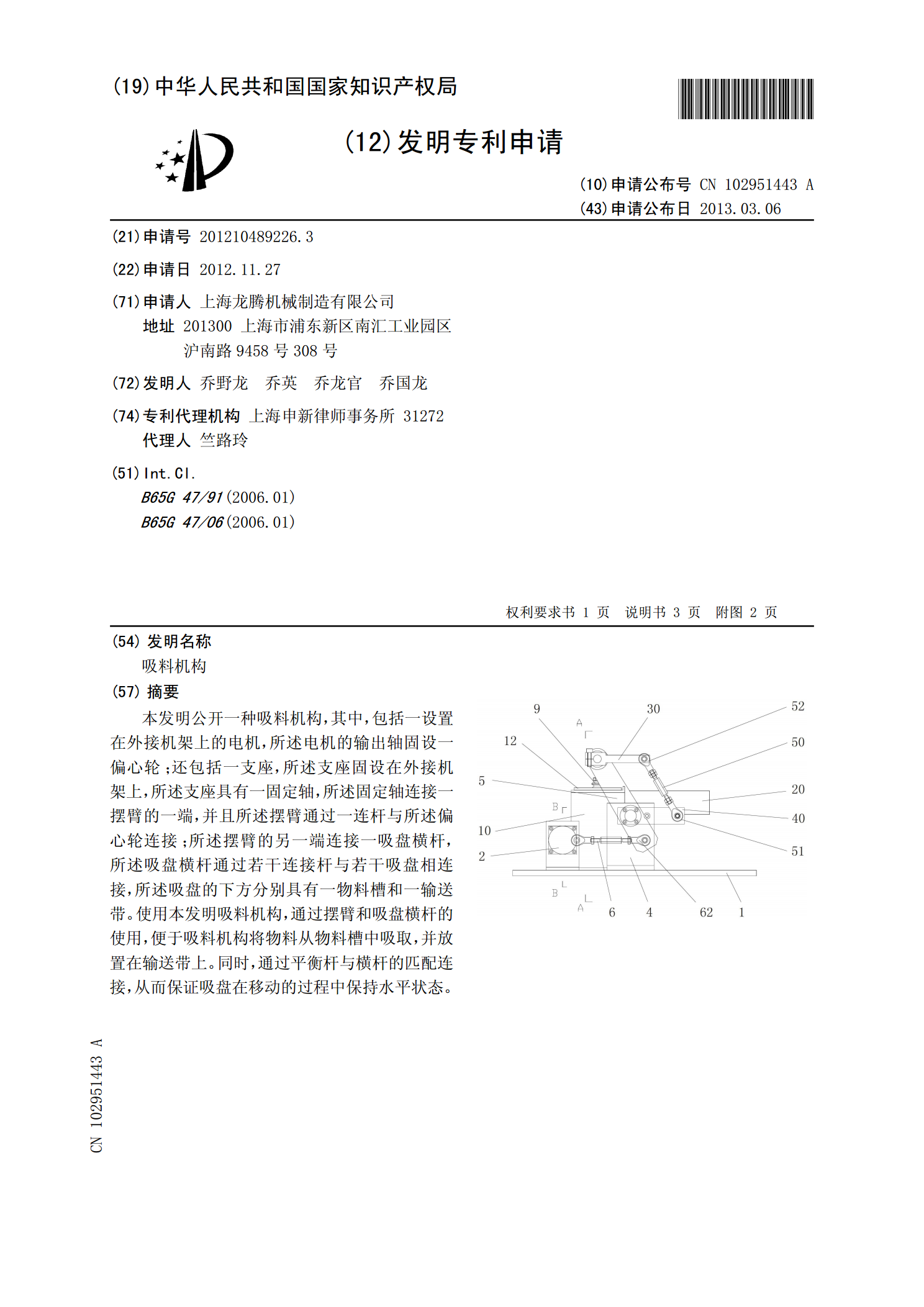
本发明公开一种吸料机构,其中,包括一设置在外接机架上的电机,所述电机的输出轴固设一偏心轮;还包括一支座,所述支座固设在外接机架上,所述支座具有一固定轴,所述固定轴连接一摆臂的一端,并且所述摆臂通过一连杆与所述偏心轮连接;所述摆臂的另一端连接一吸盘横杆,所述吸盘横杆通过若干连接杆与若干吸盘相连接,所述吸盘的下方分别具有一物料槽和一输送带。使用本发明吸料机构,通过摆臂和吸盘横杆的使用,便于吸料机构将物料从物料槽中吸取,并放置在输送带上。同时,通过平衡杆与横杆的匹配连接,从而保证吸盘在移动的过程中保持水平状态。
一种螺旋吸料机构.pdf
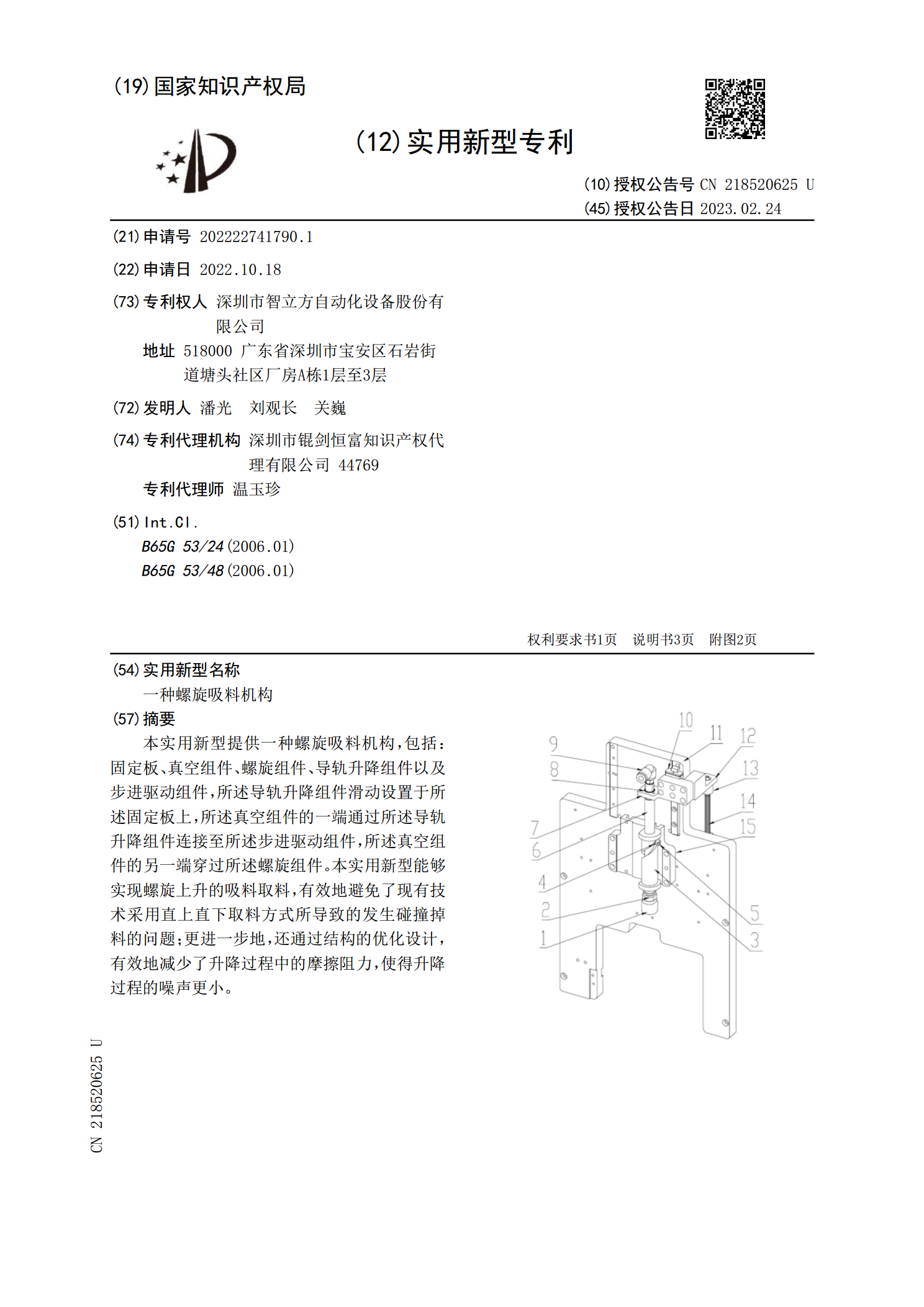
本实用新型提供一种螺旋吸料机构,包括:固定板、真空组件、螺旋组件、导轨升降组件以及步进驱动组件,所述导轨升降组件滑动设置于所述固定板上,所述真空组件的一端通过所述导轨升降组件连接至所述步进驱动组件,所述真空组件的另一端穿过所述螺旋组件。本实用新型能够实现螺旋上升的吸料取料,有效地避免了现有技术采用直上直下取料方式所导致的发生碰撞掉料的问题;更进一步地,还通过结构的优化设计,有效地减少了升降过程中的摩擦阻力,使得升降过程的噪声更小。