
一种朱砂桔采摘机器人及其采摘方法.pdf

Th****84


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种朱砂桔采摘机器人及其采摘方法.pdf
本发明公开了一种朱砂桔采摘机器人及其采摘方法。目前国内朱砂桔的采摘作业基本上还是手工完成,属于典型的劳动密集型工作。本发明一种朱砂桔采摘机器人,包括行进机构、旋转机构、升降机构、伸缩机构、采摘机构和摄像头。行进机构包括行进电机、行进轮和万向轮。摄像头设置在底板上。旋转机构包括旋转板和旋转驱动件。升降机构包括上支撑板、下支撑架、升降架、光轴和升降驱动件。伸缩机构包括伸缩板、伸缩杆组、第三齿轮、第四齿轮和第二舵机。采摘机构包括挡板、固定刀片、主动刀片和第三舵机。本发明通过灰度化、二值化、中值滤波、卷积神经元网
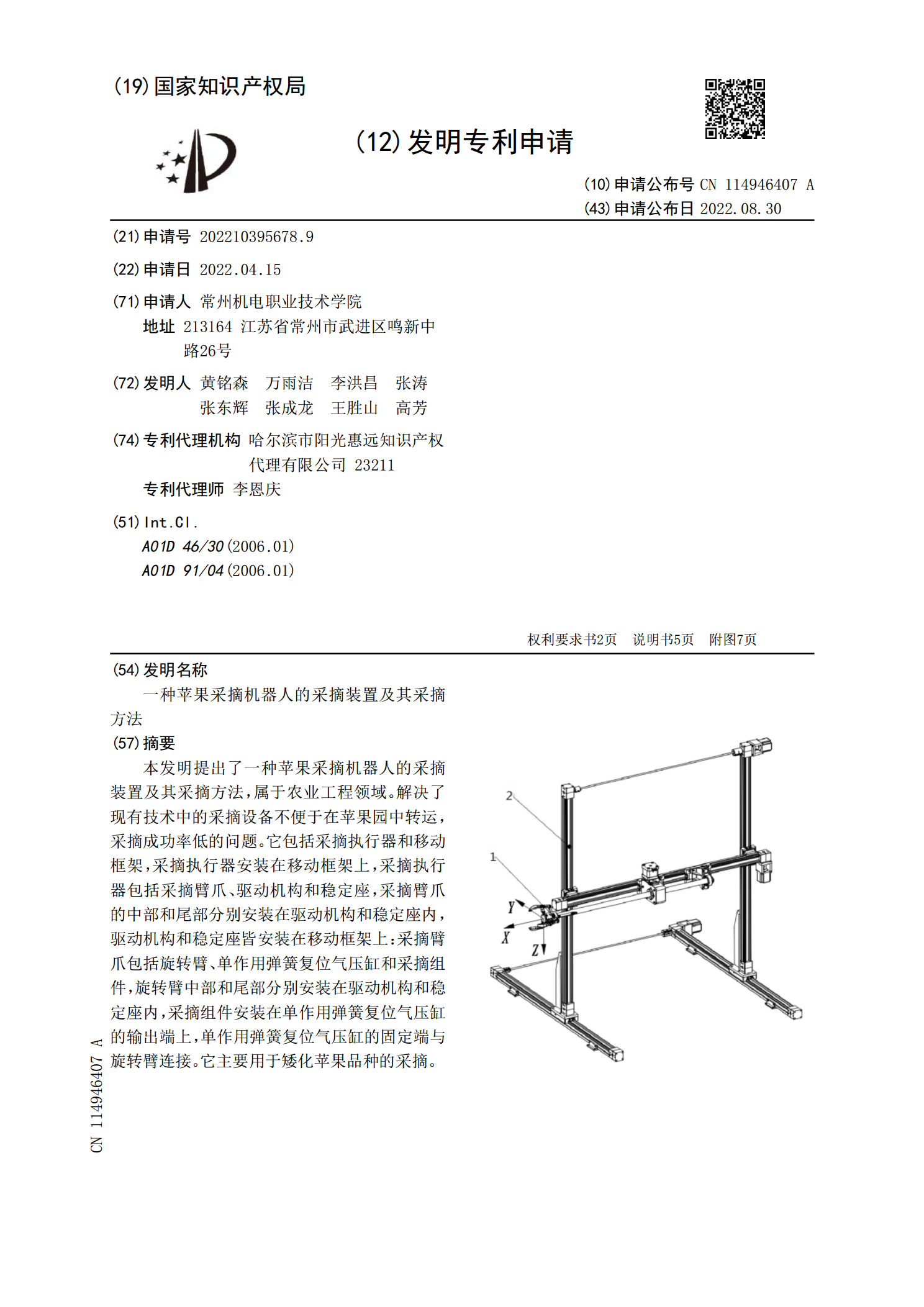
一种苹果采摘机器人的采摘装置及其采摘方法.pdf
本发明提出了一种苹果采摘机器人的采摘装置及其采摘方法,属于农业工程领域。解决了现有技术中的采摘设备不便于在苹果园中转运,采摘成功率低的问题。它包括采摘执行器和移动框架,采摘执行器安装在移动框架上,采摘执行器包括采摘臂爪、驱动机构和稳定座,采摘臂爪的中部和尾部分别安装在驱动机构和稳定座内,驱动机构和稳定座皆安装在移动框架上:采摘臂爪包括旋转臂、单作用弹簧复位气压缸和采摘组件,旋转臂中部和尾部分别安装在驱动机构和稳定座内,采摘组件安装在单作用弹簧复位气压缸的输出端上,单作用弹簧复位气压缸的固定端与旋转臂连接。
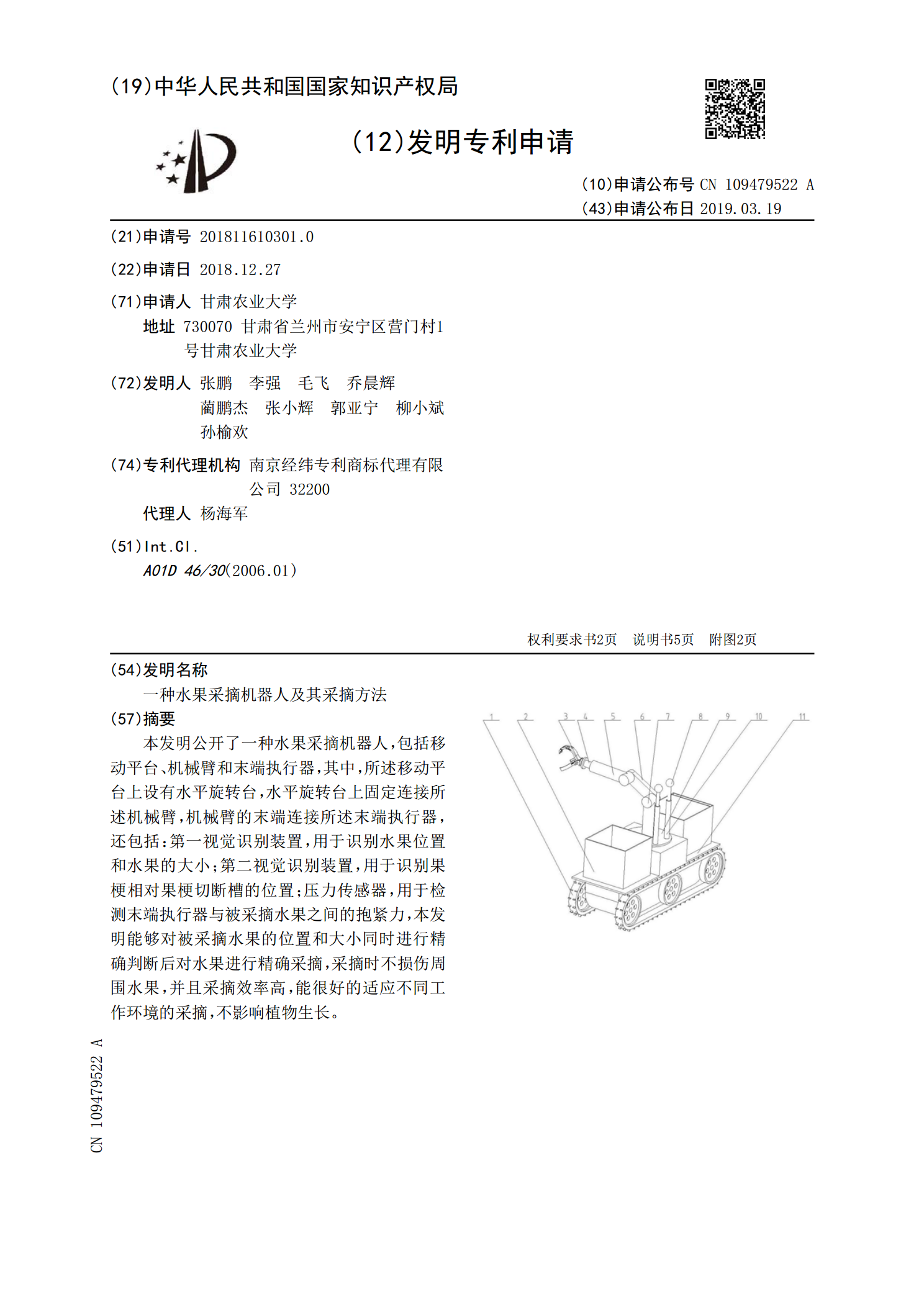
一种水果采摘机器人及其采摘方法.pdf
本发明公开了一种水果采摘机器人,包括移动平台、机械臂和末端执行器,其中,所述移动平台上设有水平旋转台,水平旋转台上固定连接所述机械臂,机械臂的末端连接所述末端执行器,还包括:第一视觉识别装置,用于识别水果位置和水果的大小;第二视觉识别装置,用于识别果梗相对果梗切断槽的位置;压力传感器,用于检测末端执行器与被采摘水果之间的抱紧力,本发明能够对被采摘水果的位置和大小同时进行精确判断后对水果进行精确采摘,采摘时不损伤周围水果,并且采摘效率高,能很好的适应不同工作环境的采摘,不影响植物生长。

一种机械可调式水果采摘机器人及其采摘方法.pdf
本发明涉及一种机械可调式水果采摘机器人及其采摘方法,其包括行走机构和采摘机构,采摘机构包括设置在行走机构上的升降调节单元以及设置在升降调节单元上的定位切割单元;升降调节单元用于带动定位切割单元升高后靠近采摘物,定位切割单元用于对采摘物的定位切割;所述行走机构为履带运输车,履带运输车包括履带行走装置,设置在履带行走装置上的无线导航控制装置和液压升降旋转装置,本发明,通过智能机械采摘代替了人工采摘,免除了人工爬树费力而又危险的低效劳动,使采摘棕榈果之类的水果变得非常方便,并提高了工作效率。

一种茶园芽茶采摘机器人及采摘方法.pdf
本发明属于园林采茶设备技术领域,具体涉及一种茶园芽茶采摘机器人及采摘方法,包括机架、驱动机构及采茶机构,驱动机构设于机架之上,所述采茶机构包括滚筒、螺旋采集杆及固定采摘臂,固定采摘臂与机架固定连接,固定采摘臂套设于滚筒内且与滚筒贴合;螺旋采集杆设于固定采摘臂之内,螺旋采集杆并与驱动机构连接,用于传送芽茶;固定采摘臂为四分之三圆环形,滚筒具有筛孔,驱动机构驱动滚筒转动,滚筒与固定采摘臂相对运动,由上至下将芽茶经筛孔筛入固定采摘臂之内,以实现采摘芽茶;通过滚筒的旋转由上至下将嫩芽局部区域通过筛孔筛选至滚筒内,