
一种苹果采摘机器人的采摘装置及其采摘方法.pdf

增梅****主啊


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种苹果采摘机器人的采摘装置及其采摘方法.pdf
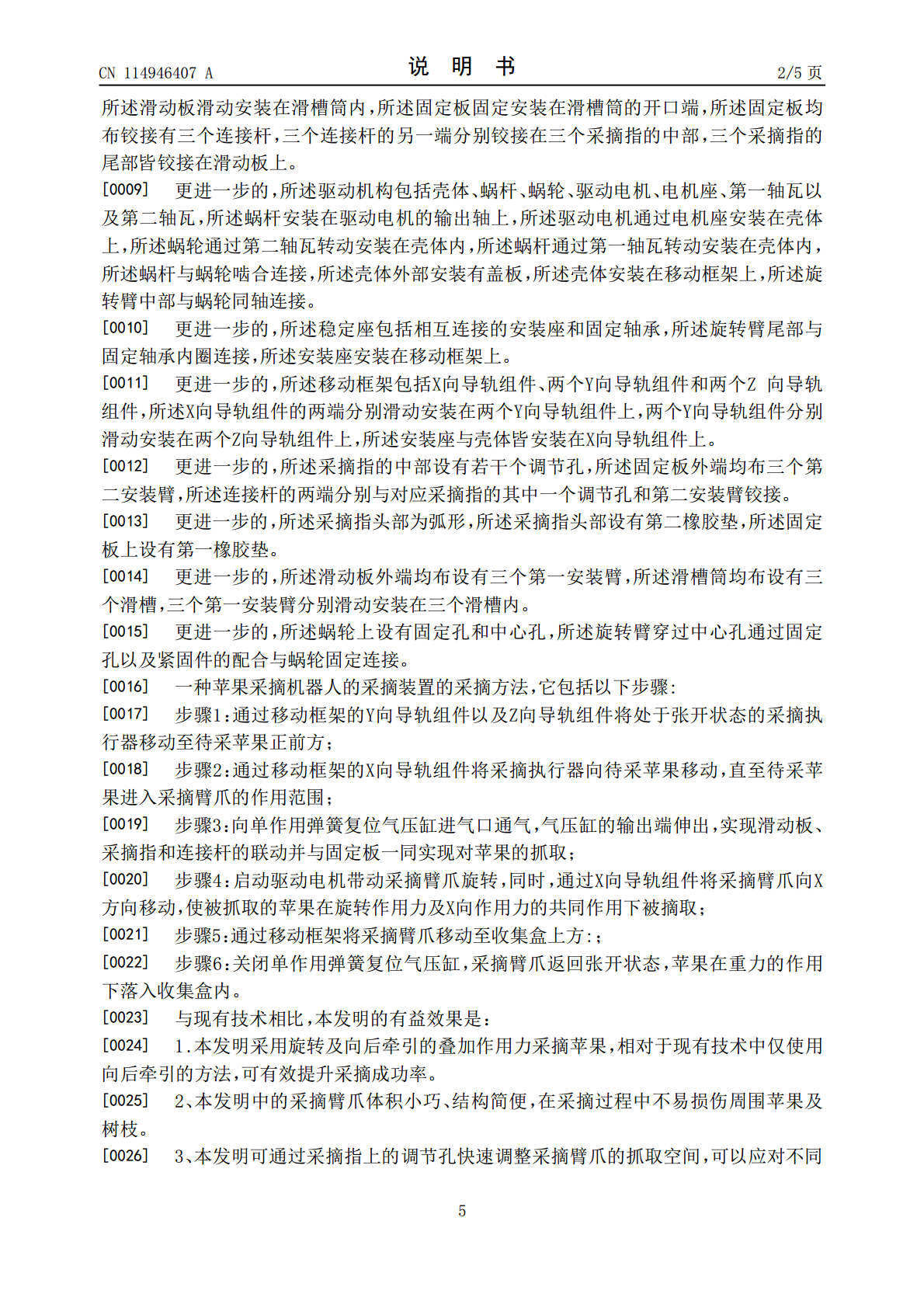
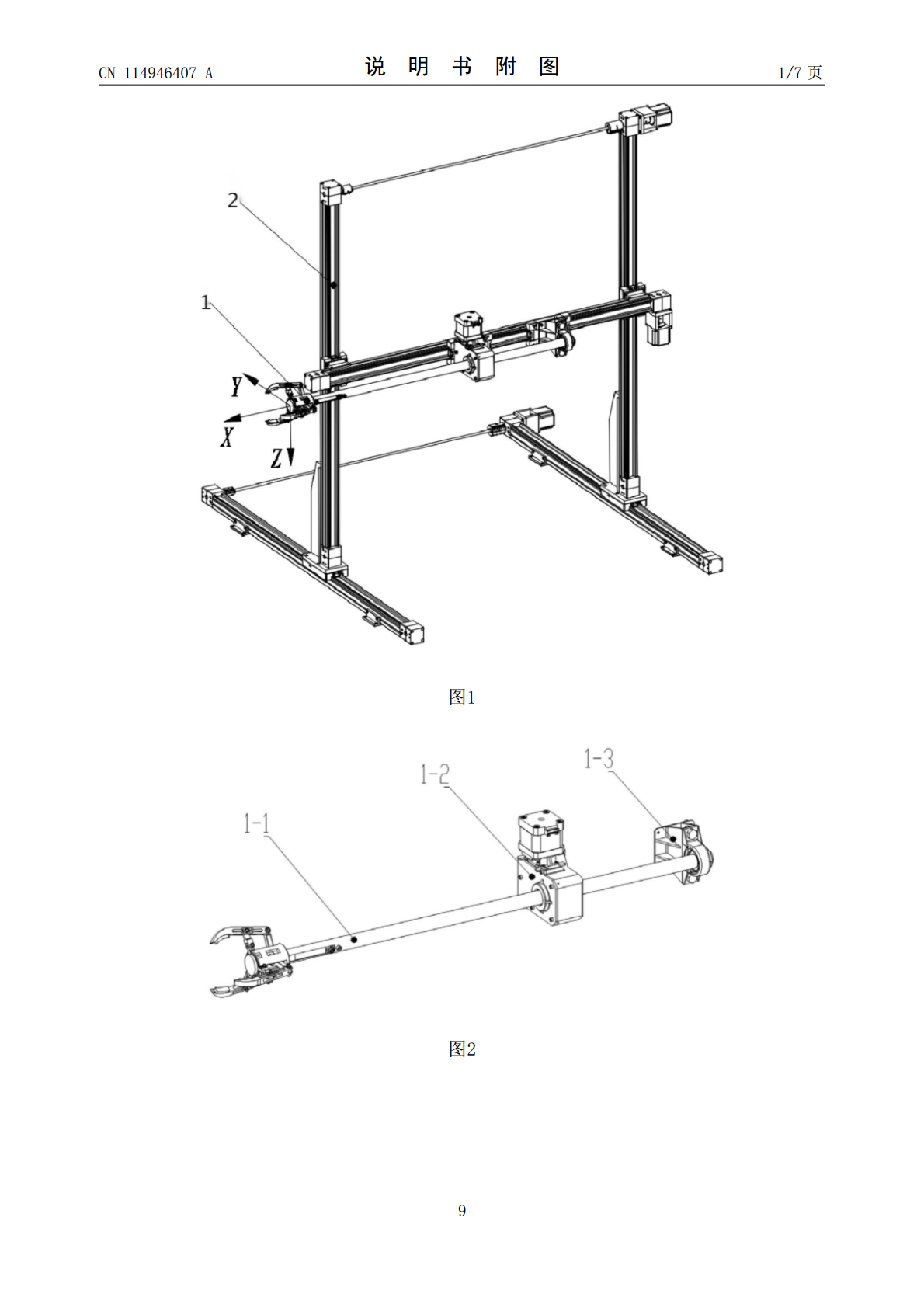
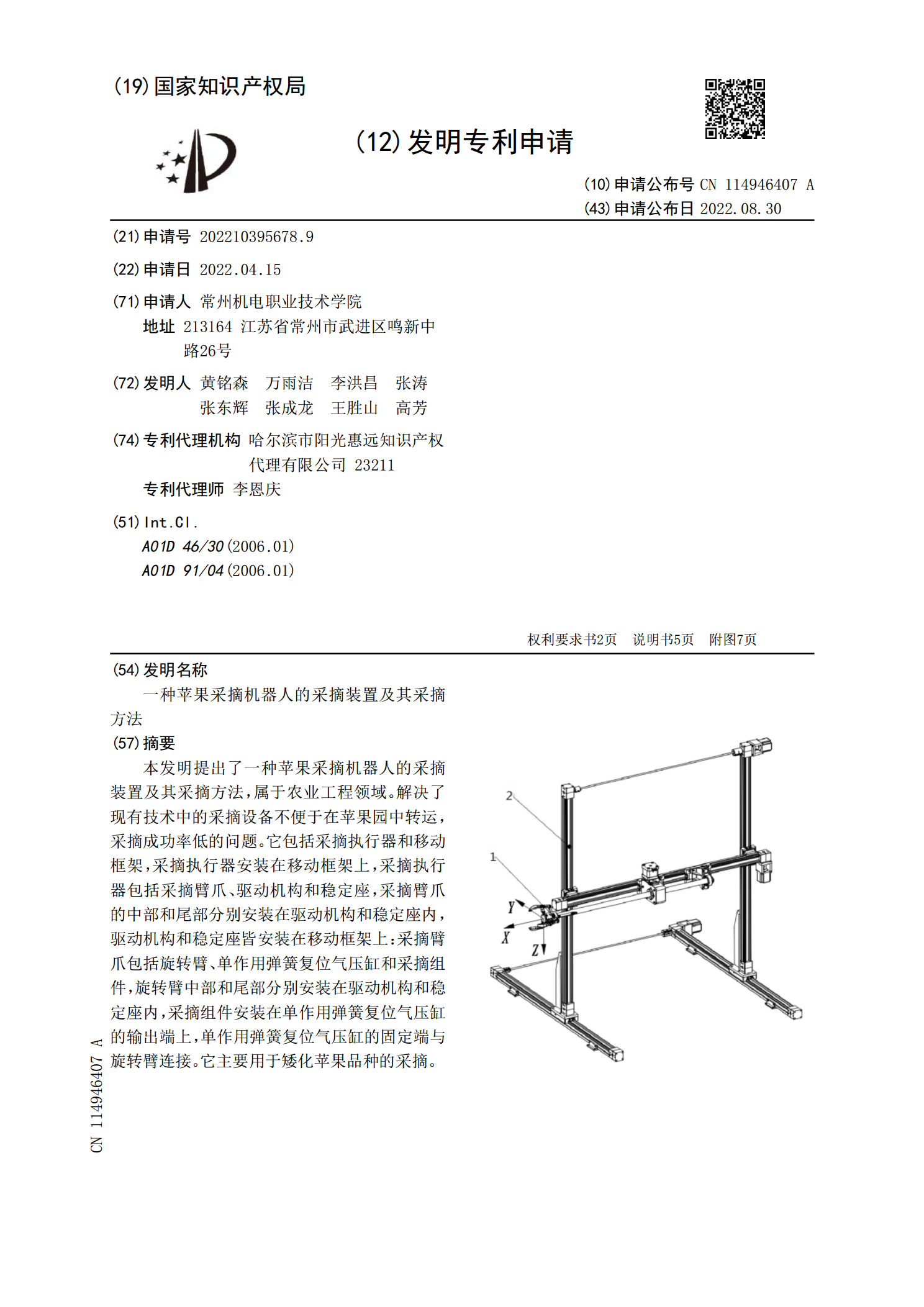
本发明提出了一种苹果采摘机器人的采摘装置及其采摘方法,属于农业工程领域。解决了现有技术中的采摘设备不便于在苹果园中转运,采摘成功率低的问题。它包括采摘执行器和移动框架,采摘执行器安装在移动框架上,采摘执行器包括采摘臂爪、驱动机构和稳定座,采摘臂爪的中部和尾部分别安装在驱动机构和稳定座内,驱动机构和稳定座皆安装在移动框架上:采摘臂爪包括旋转臂、单作用弹簧复位气压缸和采摘组件,旋转臂中部和尾部分别安装在驱动机构和稳定座内,采摘组件安装在单作用弹簧复位气压缸的输出端上,单作用弹簧复位气压缸的固定端与旋转臂连接。
一种苹果采摘装置及其采摘方法.pdf
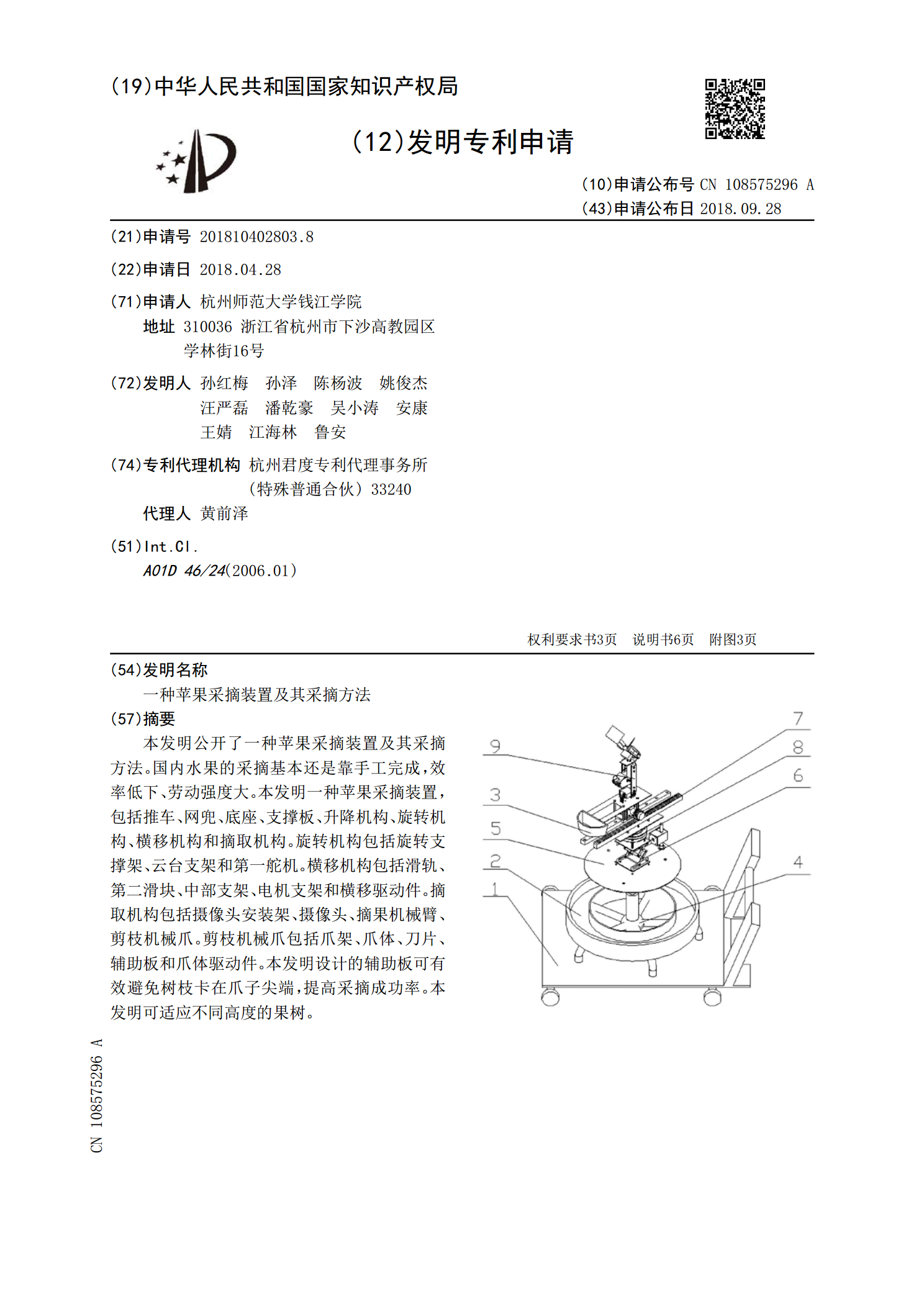
本发明公开了一种苹果采摘装置及其采摘方法。国内水果的采摘基本还是靠手工完成,效率低下、劳动强度大。本发明一种苹果采摘装置,包括推车、网兜、底座、支撑板、升降机构、旋转机构、横移机构和摘取机构。旋转机构包括旋转支撑架、云台支架和第一舵机。横移机构包括滑轨、第二滑块、中部支架、电机支架和横移驱动件。摘取机构包括摄像头安装架、摄像头、摘果机械臂、剪枝机械爪。剪枝机械爪包括爪架、爪体、刀片、辅助板和爪体驱动件。本发明设计的辅助板可有效避免树枝卡在爪子尖端,提高采摘成功率。本发明可适应不同高度的果树。
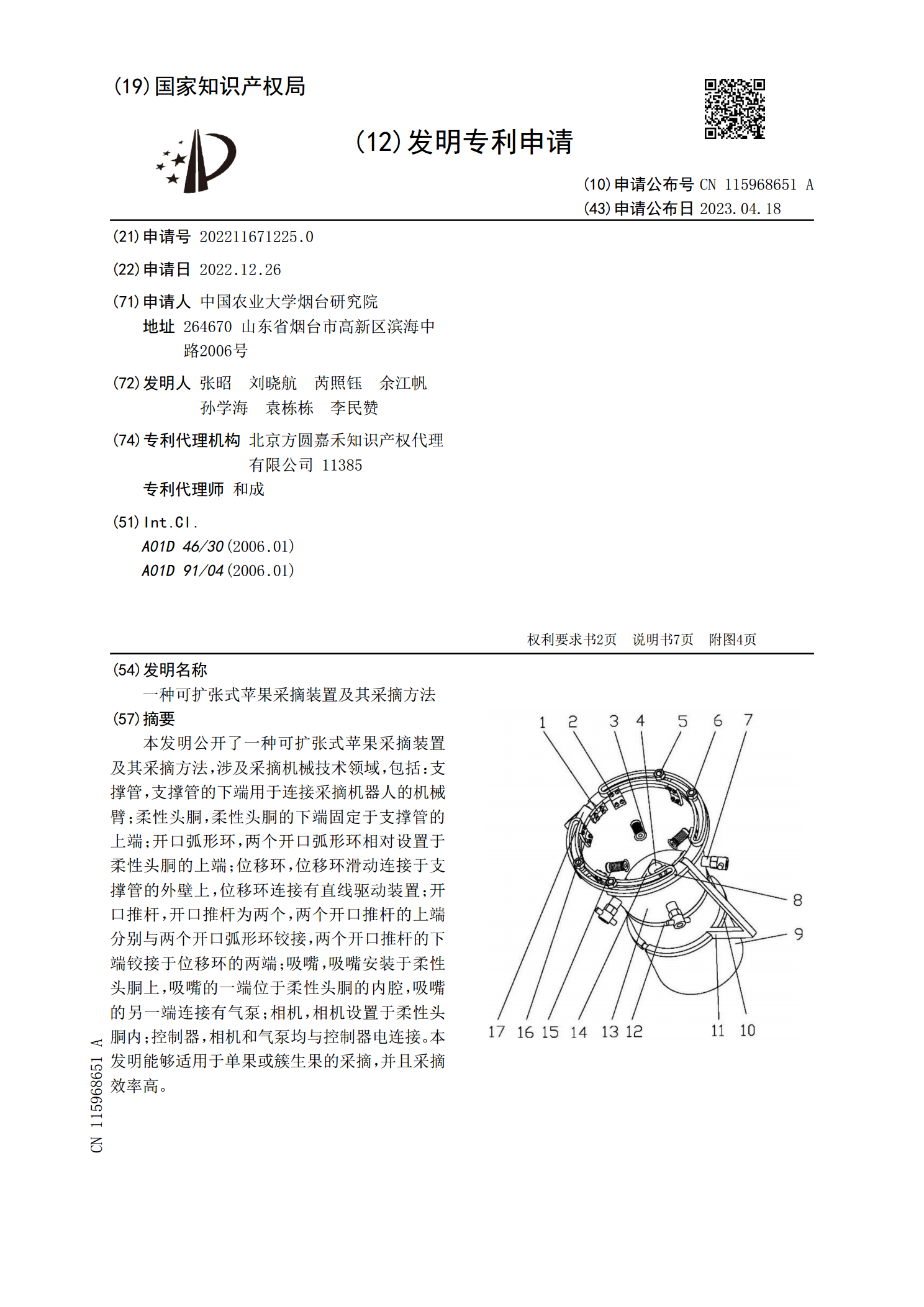
一种可扩张式苹果采摘装置及其采摘方法.pdf
本发明公开了一种可扩张式苹果采摘装置及其采摘方法,涉及采摘机械技术领域,包括:支撑管,支撑管的下端用于连接采摘机器人的机械臂;柔性头胴,柔性头胴的下端固定于支撑管的上端;开口弧形环,两个开口弧形环相对设置于柔性头胴的上端;位移环,位移环滑动连接于支撑管的外壁上,位移环连接有直线驱动装置;开口推杆,开口推杆为两个,两个开口推杆的上端分别与两个开口弧形环铰接,两个开口推杆的下端铰接于位移环的两端;吸嘴,吸嘴安装于柔性头胴上,吸嘴的一端位于柔性头胴的内腔,吸嘴的另一端连接有气泵;相机,相机设置于柔性头胴内;控制
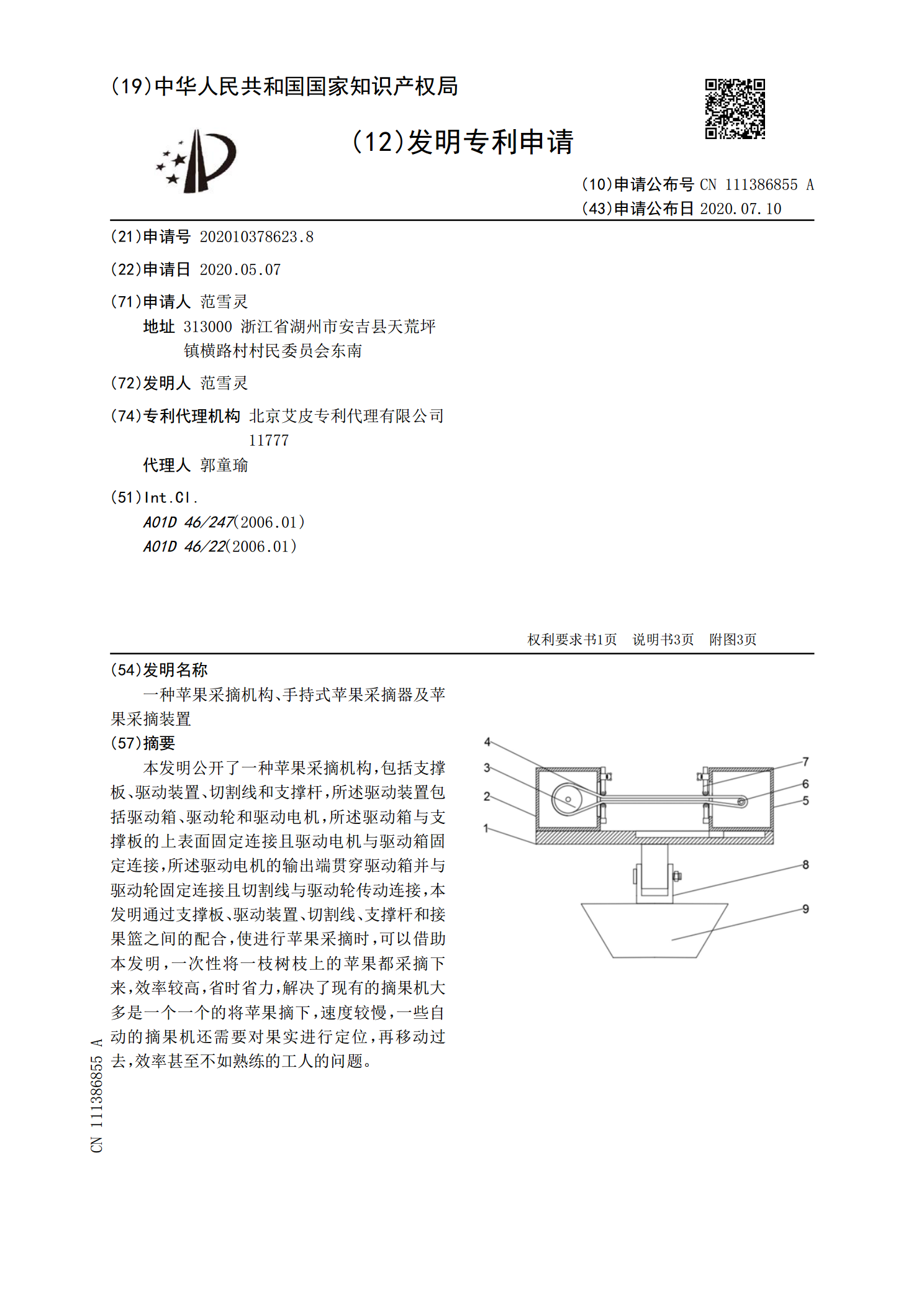
一种苹果采摘机构、手持式苹果采摘器及苹果采摘装置.pdf
本发明公开了一种苹果采摘机构,包括支撑板、驱动装置、切割线和支撑杆,所述驱动装置包括驱动箱、驱动轮和驱动电机,所述驱动箱与支撑板的上表面固定连接且驱动电机与驱动箱固定连接,所述驱动电机的输出端贯穿驱动箱并与驱动轮固定连接且切割线与驱动轮传动连接,本发明通过支撑板、驱动装置、切割线、支撑杆和接果篮之间的配合,使进行苹果采摘时,可以借助本发明,一次性将一枝树枝上的苹果都采摘下来,效率较高,省时省力,解决了现有的摘果机大多是一个一个的将苹果摘下,速度较慢,一些自动的摘果机还需要对果实进行定位,再移动过去,效率甚
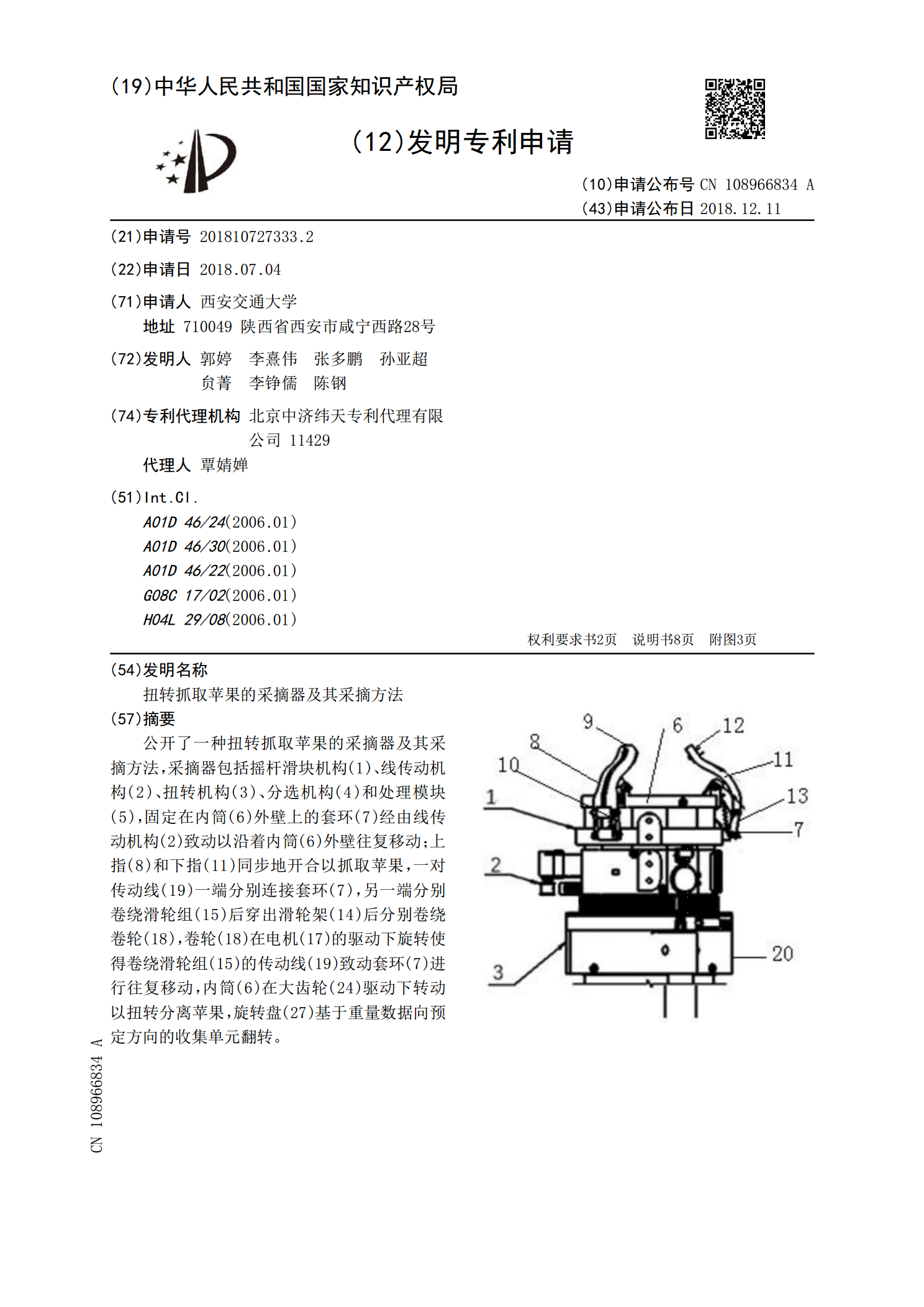
扭转抓取苹果的采摘器及其采摘方法.pdf
公开了一种扭转抓取苹果的采摘器及其采摘方法,采摘器包括摇杆滑块机构(1)、线传动机构(2)、扭转机构(3)、分选机构(4)和处理模块(5),固定在内筒(6)外壁上的套环(7)经由线传动机构(2)致动以沿着内筒(6)外壁往复移动;上指(8)和下指(11)同步地开合以抓取苹果,一对传动线(19)一端分别连接套环(7),另一端分别卷绕滑轮组(15)后穿出滑轮架(14)后分别卷绕卷轮(18),卷轮(18)在电机(17)的驱动下旋转使得卷绕滑轮组(15)的传动线(19)致动套环(7)进行往复移动,内筒(6)在大齿轮