
一种茶园芽茶采摘机器人及采摘方法.pdf

书生****文章


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种茶园芽茶采摘机器人及采摘方法.pdf
本发明属于园林采茶设备技术领域,具体涉及一种茶园芽茶采摘机器人及采摘方法,包括机架、驱动机构及采茶机构,驱动机构设于机架之上,所述采茶机构包括滚筒、螺旋采集杆及固定采摘臂,固定采摘臂与机架固定连接,固定采摘臂套设于滚筒内且与滚筒贴合;螺旋采集杆设于固定采摘臂之内,螺旋采集杆并与驱动机构连接,用于传送芽茶;固定采摘臂为四分之三圆环形,滚筒具有筛孔,驱动机构驱动滚筒转动,滚筒与固定采摘臂相对运动,由上至下将芽茶经筛孔筛入固定采摘臂之内,以实现采摘芽茶;通过滚筒的旋转由上至下将嫩芽局部区域通过筛孔筛选至滚筒内,
一种黄芽茶采摘后保存方法.pdf
本发明涉及茶叶技术领域,具体涉及一种黄芽茶采摘后保存方法,将黄芽茶采摘后,分层摊晾在20?25目的尼龙网上,每层摊晾厚度在1cm内,每层尼龙网间隔为3?3.5cm,将黄糖、柚皮苷、杨梅素与水按2~5:0.01~0.015:0.02~0.04:130~135混合均匀,加入蒸汽发生器中,由蒸汽发生器产出蒸汽,保证摊晾空气中蒸汽体积浓度为10?12%,黄茶摊晾期间,摊晾温度为6?8℃,经本发明方法保存的黄芽保存时间可延长至12?15天,在保存期间营养物质损失较少,新鲜茶叶的色泽和鲜嫩度保持较好。
一种苹果采摘机器人的采摘装置及其采摘方法.pdf
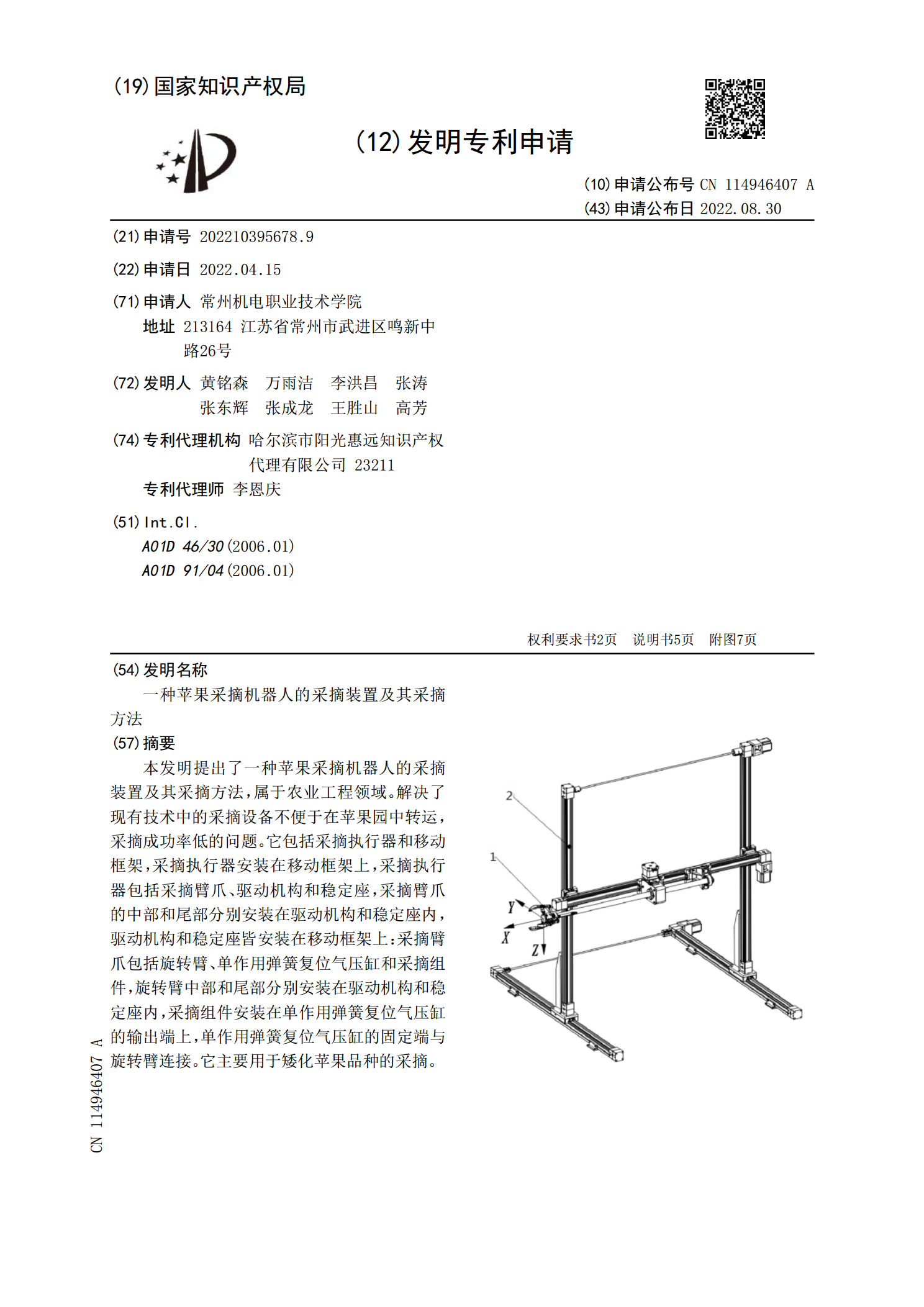
本发明提出了一种苹果采摘机器人的采摘装置及其采摘方法,属于农业工程领域。解决了现有技术中的采摘设备不便于在苹果园中转运,采摘成功率低的问题。它包括采摘执行器和移动框架,采摘执行器安装在移动框架上,采摘执行器包括采摘臂爪、驱动机构和稳定座,采摘臂爪的中部和尾部分别安装在驱动机构和稳定座内,驱动机构和稳定座皆安装在移动框架上:采摘臂爪包括旋转臂、单作用弹簧复位气压缸和采摘组件,旋转臂中部和尾部分别安装在驱动机构和稳定座内,采摘组件安装在单作用弹簧复位气压缸的输出端上,单作用弹簧复位气压缸的固定端与旋转臂连接。

一种立体采摘茶园无花枝采摘树冠层的调控方法.pdf
本发明涉及一种立体采摘茶园无花枝采摘树冠层的调控方法,一种立体采摘茶园无花枝采摘树冠层的培养方法,其特征在于步骤为:对春梢实行全面留鱼叶采摘,并在春茶结束后进行修剪;对二轮梢进行控制性定位修剪,修剪后的二轮梢保留部分作为萌发下轮新梢、构成采摘生产枝层的基础枝梢;放任三轮梢;促发四轮梢为主的秋梢萌发:秋梢萌发前施用氮素肥料促进其生长,形成翌年骨干生产枝层;在可萌发生长区域,促进其生长形成无花枝组成的采摘树冠层。本发明采用“采一控二放三促四(五)”的技术,突出在二轮梢定位控制和四轮梢为主的秋梢培养,从而形成无
一种水果采摘机器人及其采摘方法.pdf
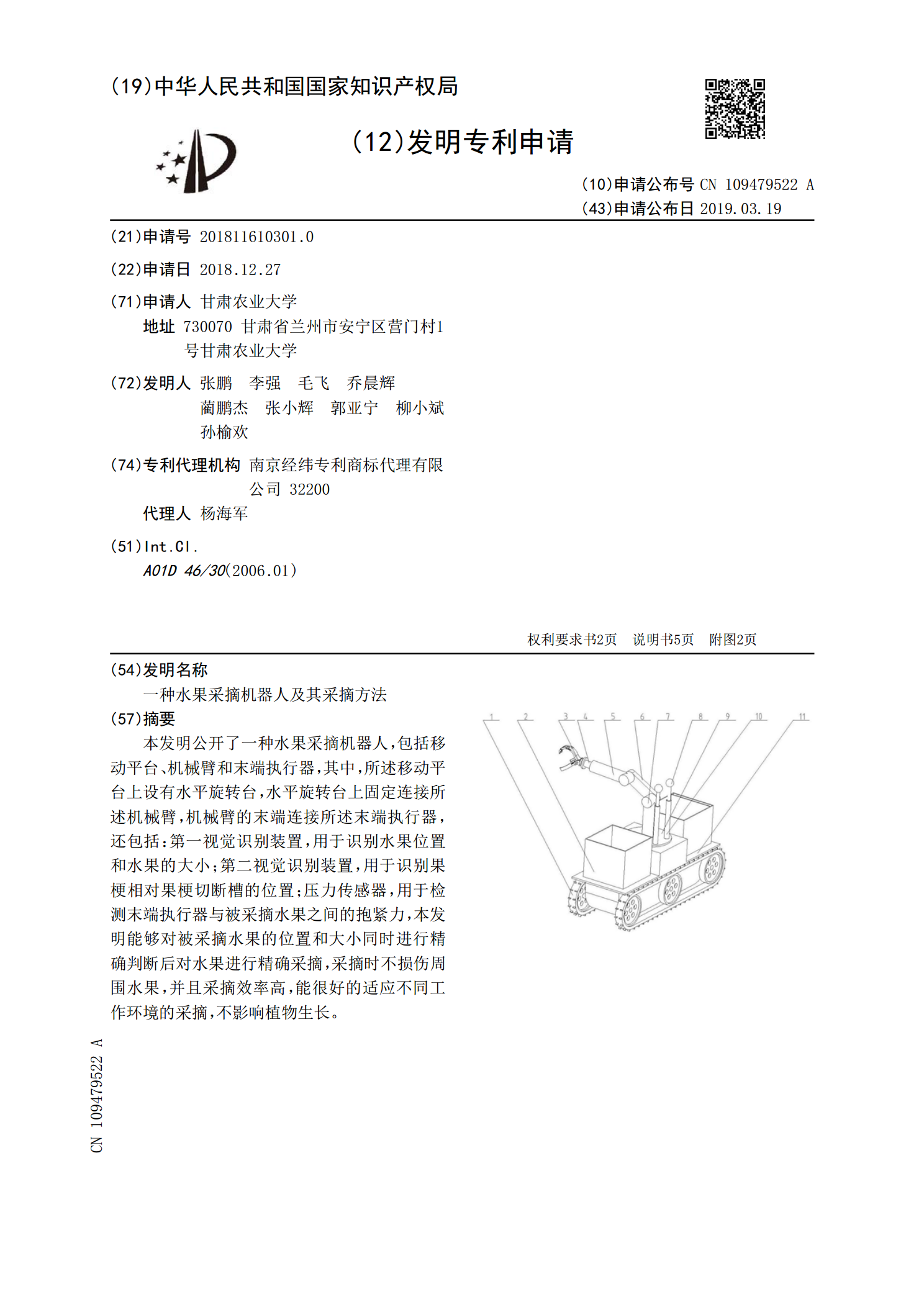
本发明公开了一种水果采摘机器人,包括移动平台、机械臂和末端执行器,其中,所述移动平台上设有水平旋转台,水平旋转台上固定连接所述机械臂,机械臂的末端连接所述末端执行器,还包括:第一视觉识别装置,用于识别水果位置和水果的大小;第二视觉识别装置,用于识别果梗相对果梗切断槽的位置;压力传感器,用于检测末端执行器与被采摘水果之间的抱紧力,本发明能够对被采摘水果的位置和大小同时进行精确判断后对水果进行精确采摘,采摘时不损伤周围水果,并且采摘效率高,能很好的适应不同工作环境的采摘,不影响植物生长。