
盲拆拆垛方法及系统.pdf

建英****66


1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
盲拆拆垛方法及系统.pdf
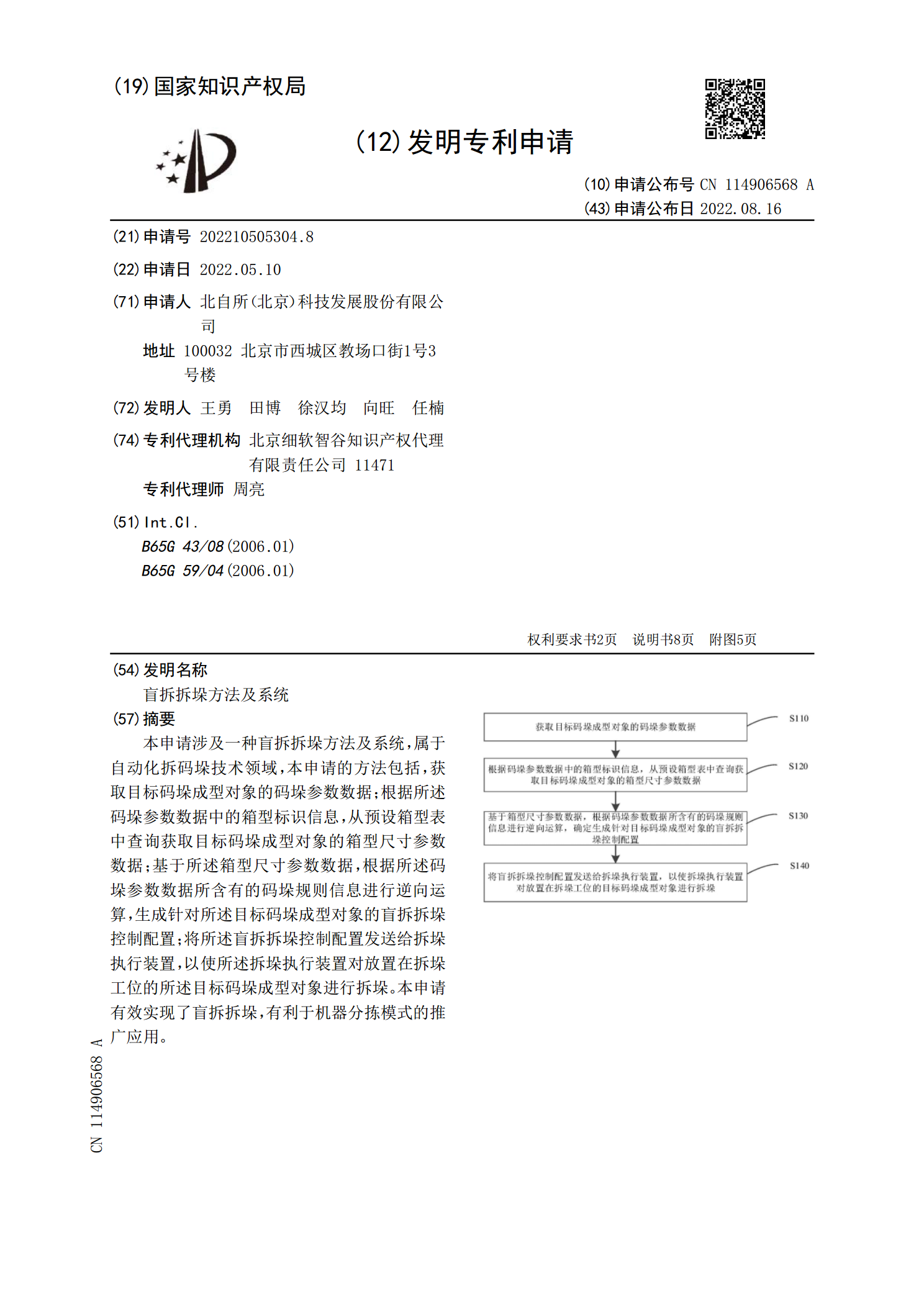
本申请涉及一种盲拆拆垛方法及系统,属于自动化拆码垛技术领域,本申请的方法包括,获取目标码垛成型对象的码垛参数数据;根据所述码垛参数数据中的箱型标识信息,从预设箱型表中查询获取目标码垛成型对象的箱型尺寸参数数据;基于所述箱型尺寸参数数据,根据所述码垛参数数据所含有的码垛规则信息进行逆向运算,生成针对所述目标码垛成型对象的盲拆拆垛控制配置;将所述盲拆拆垛控制配置发送给拆垛执行装置,以使所述拆垛执行装置对放置在拆垛工位的所述目标码垛成型对象进行拆垛。本申请有效实现了盲拆拆垛,有利于机器分拣模式的推广应用。
轮胎高速拆垛机及其拆垛方法.pdf
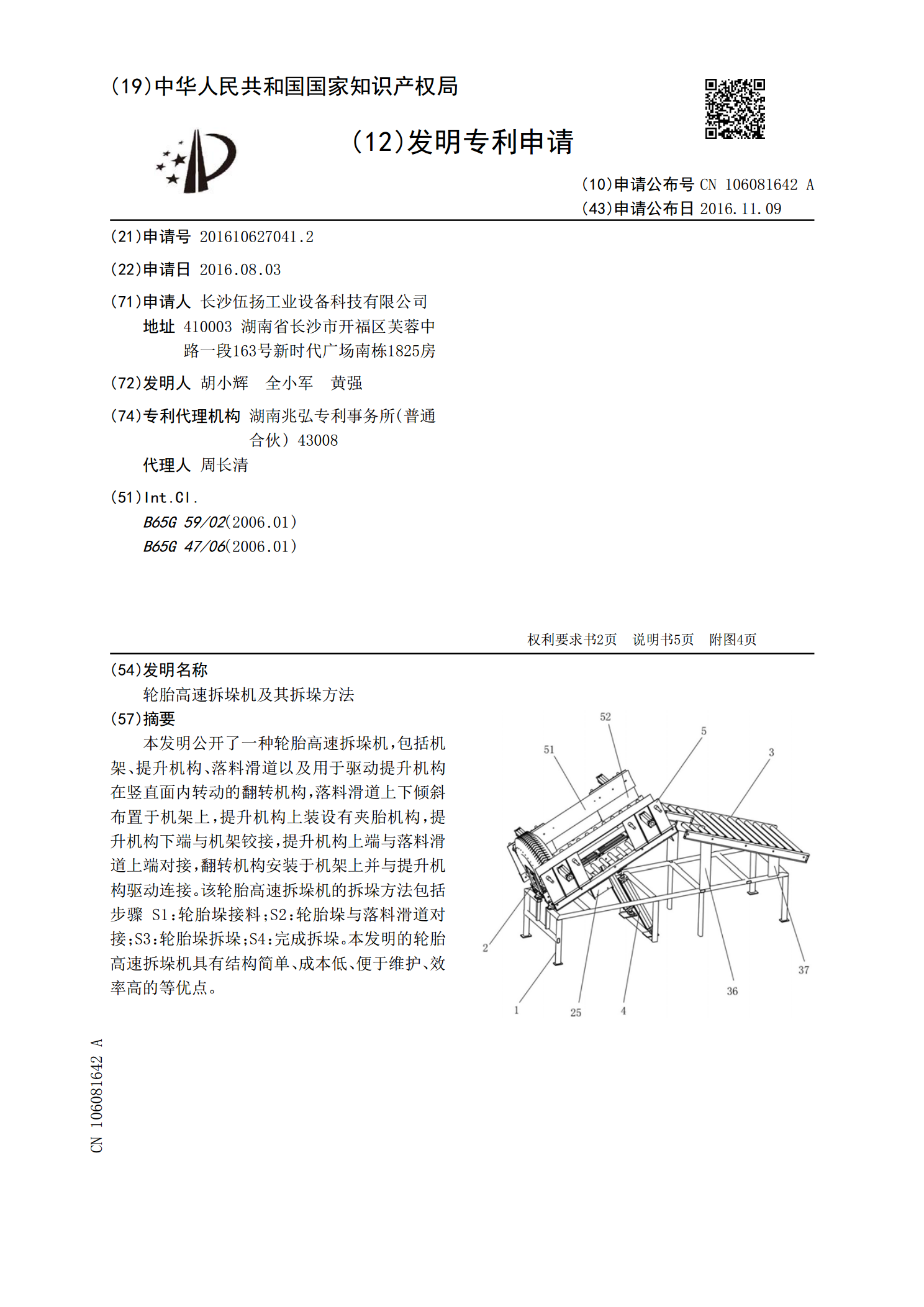
本发明公开了一种轮胎高速拆垛机,包括机架、提升机构、落料滑道以及用于驱动提升机构在竖直面内转动的翻转机构,落料滑道上下倾斜布置于机架上,提升机构上装设有夹胎机构,提升机构下端与机架铰接,提升机构上端与落料滑道上端对接,翻转机构安装于机架上并与提升机构驱动连接。该轮胎高速拆垛机的拆垛方法包括步骤S1:轮胎垛接料;S2:轮胎垛与落料滑道对接;S3:轮胎垛拆垛;S4:完成拆垛。本发明的轮胎高速拆垛机具有结构简单、成本低、便于维护、效率高的等优点。
全自动拆垛系统.pdf
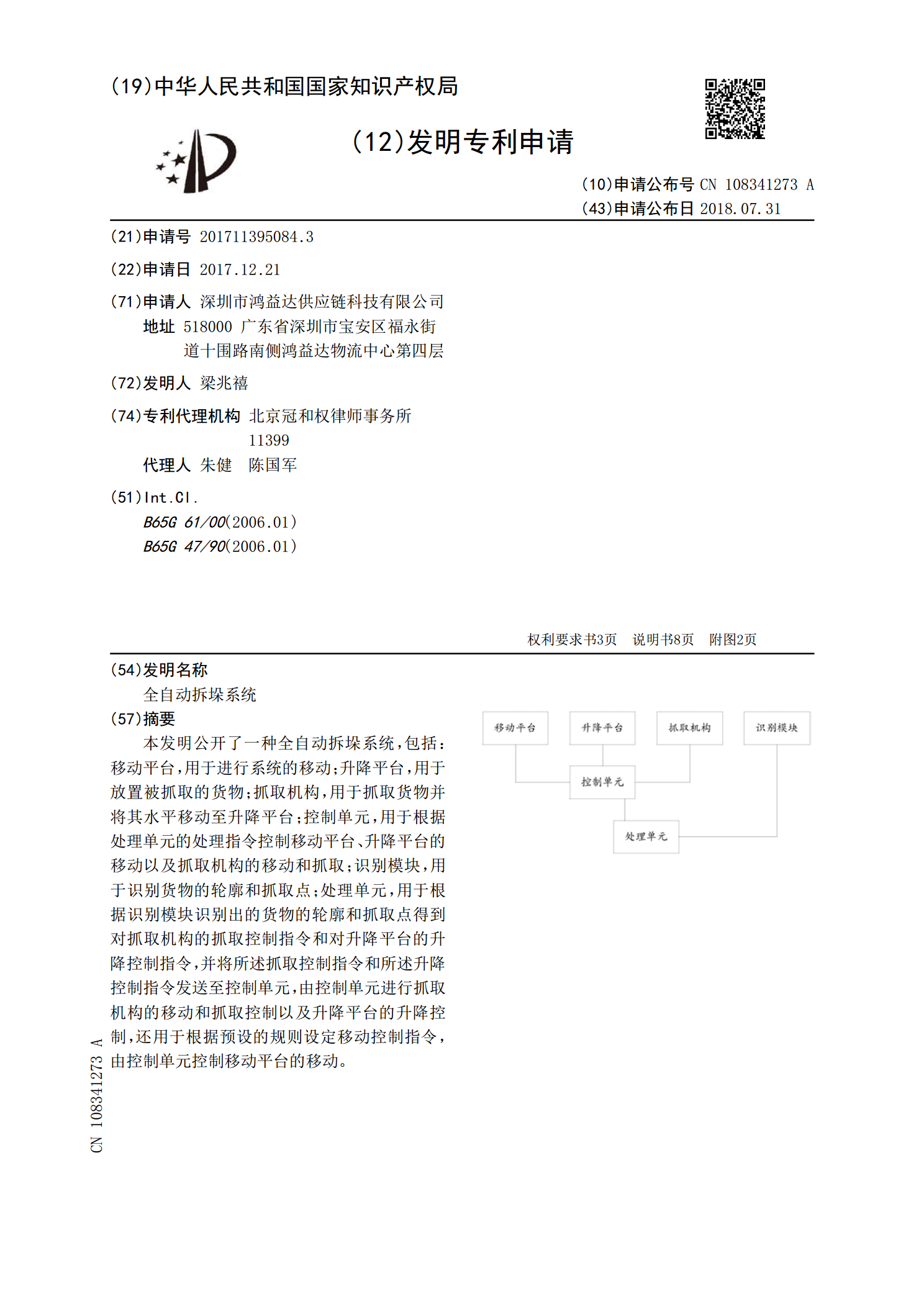
本发明公开了一种全自动拆垛系统,包括:移动平台,用于进行系统的移动;升降平台,用于放置被抓取的货物;抓取机构,用于抓取货物并将其水平移动至升降平台;控制单元,用于根据处理单元的处理指令控制移动平台、升降平台的移动以及抓取机构的移动和抓取;识别模块,用于识别货物的轮廓和抓取点;处理单元,用于根据识别模块识别出的货物的轮廓和抓取点得到对抓取机构的抓取控制指令和对升降平台的升降控制指令,并将所述抓取控制指令和所述升降控制指令发送至控制单元,由控制单元进行抓取机构的移动和抓取控制以及升降平台的升降控制,还用于根据
一种全自动拆垛拆包系统.pdf
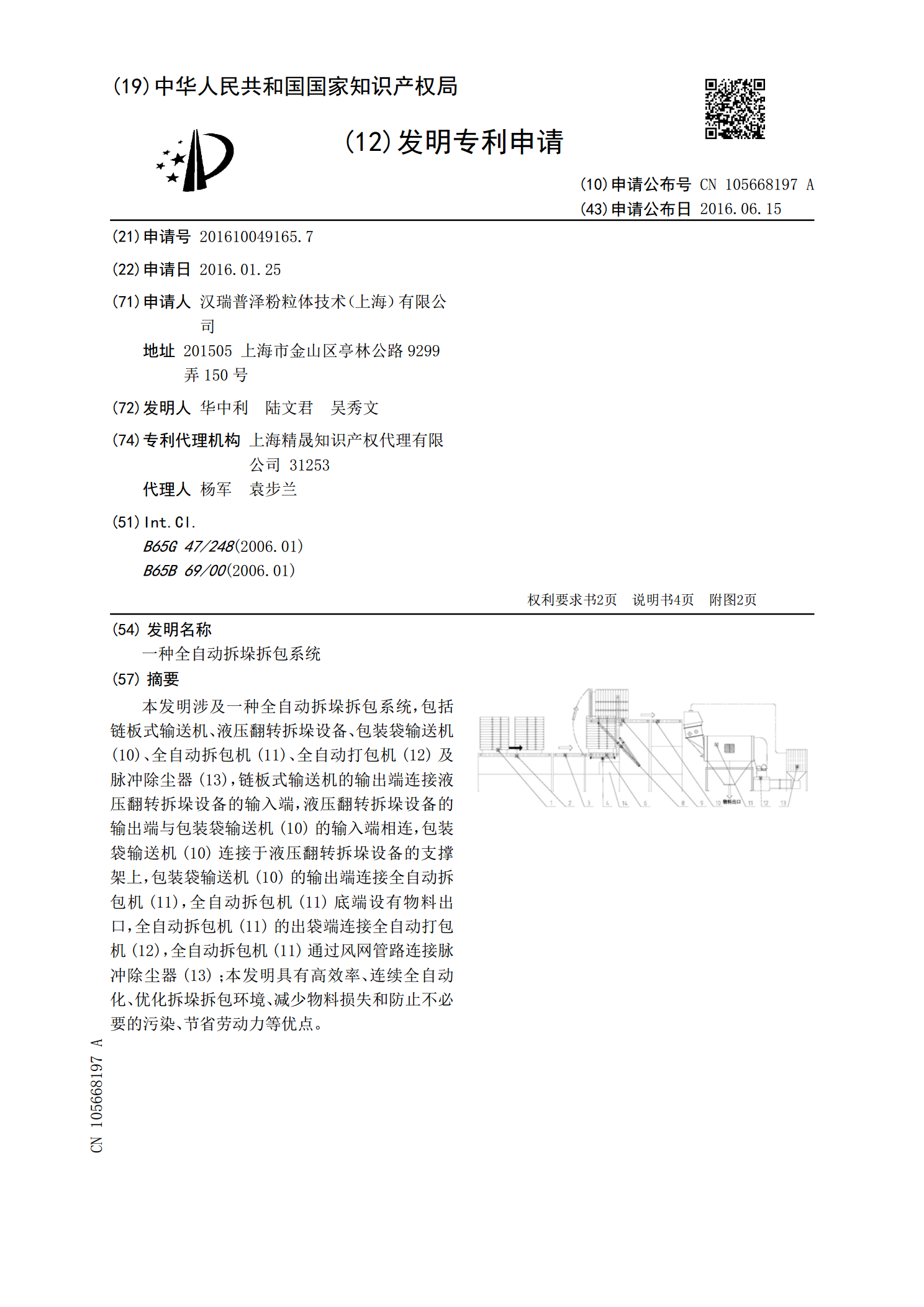
本发明涉及一种全自动拆垛拆包系统,包括链板式输送机、液压翻转拆垛设备、包装袋输送机(10)、全自动拆包机(11)、全自动打包机(12)及脉冲除尘器(13),链板式输送机的输出端连接液压翻转拆垛设备的输入端,液压翻转拆垛设备的输出端与包装袋输送机(10)的输入端相连,包装袋输送机(10)连接于液压翻转拆垛设备的支撑架上,包装袋输送机(10)的输出端连接全自动拆包机(11),全自动拆包机(11)底端设有物料出口,全自动拆包机(11)的出袋端连接全自动打包机(12),全自动拆包机(11)通过风网管路连接脉冲除尘
异型烟拆垛机及拆垛流水线.pdf
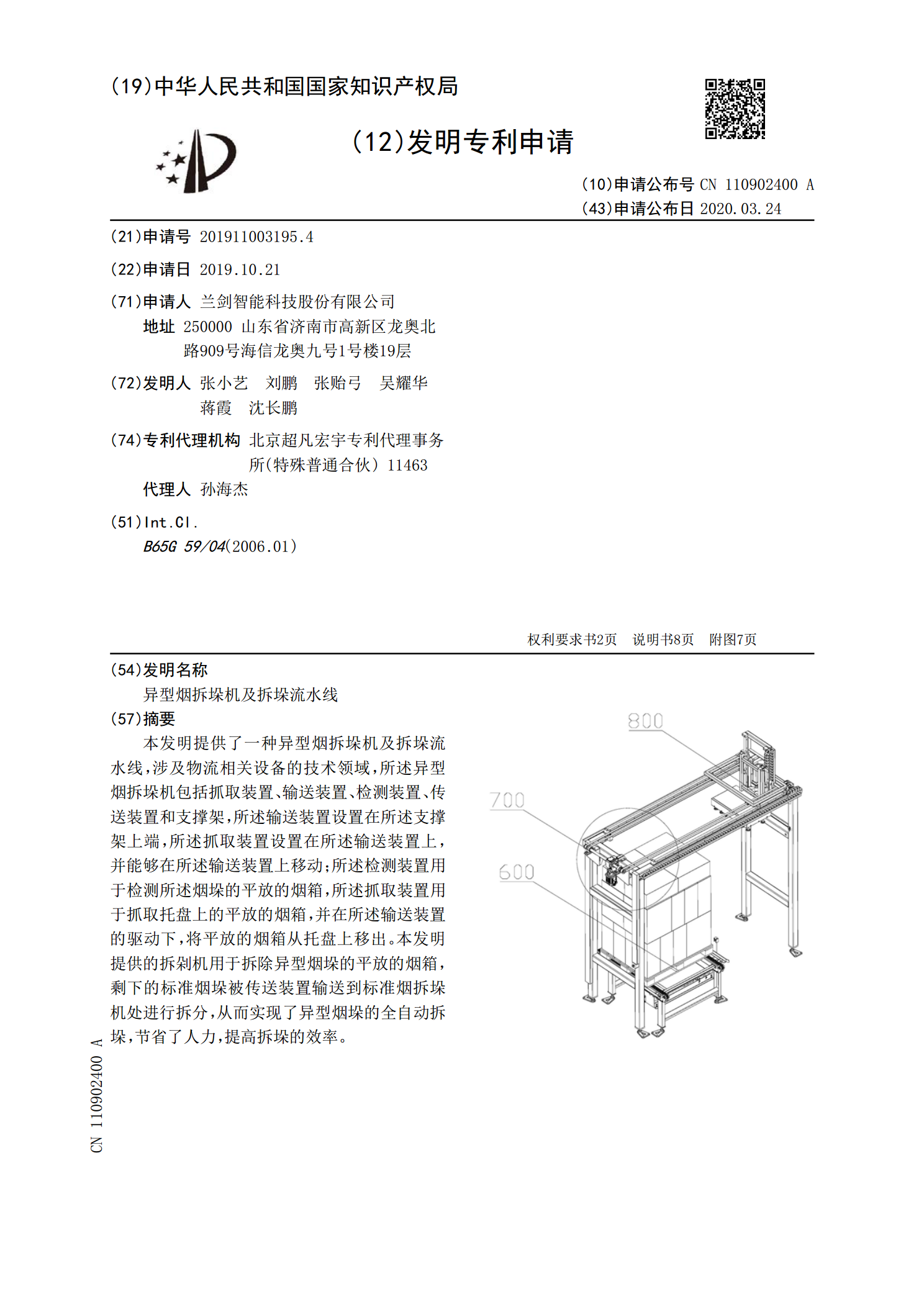
本发明提供了一种异型烟拆垛机及拆垛流水线,涉及物流相关设备的技术领域,所述异型烟拆垛机包括抓取装置、输送装置、检测装置、传送装置和支撑架,所述输送装置设置在所述支撑架上端,所述抓取装置设置在所述输送装置上,并能够在所述输送装置上移动;所述检测装置用于检测所述烟垛的平放的烟箱,所述抓取装置用于抓取托盘上的平放的烟箱,并在所述输送装置的驱动下,将平放的烟箱从托盘上移出。本发明提供的拆剁机用于拆除异型烟垛的平放的烟箱,剩下的标准烟垛被传送装置输送到标准烟拆垛机处进行拆分,从而实现了异型烟垛的全自动拆垛,节省了人