
一种使用柔性夹爪的PCBA分拣机.pdf

贤惠****66


1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种使用柔性夹爪的PCBA分拣机.pdf
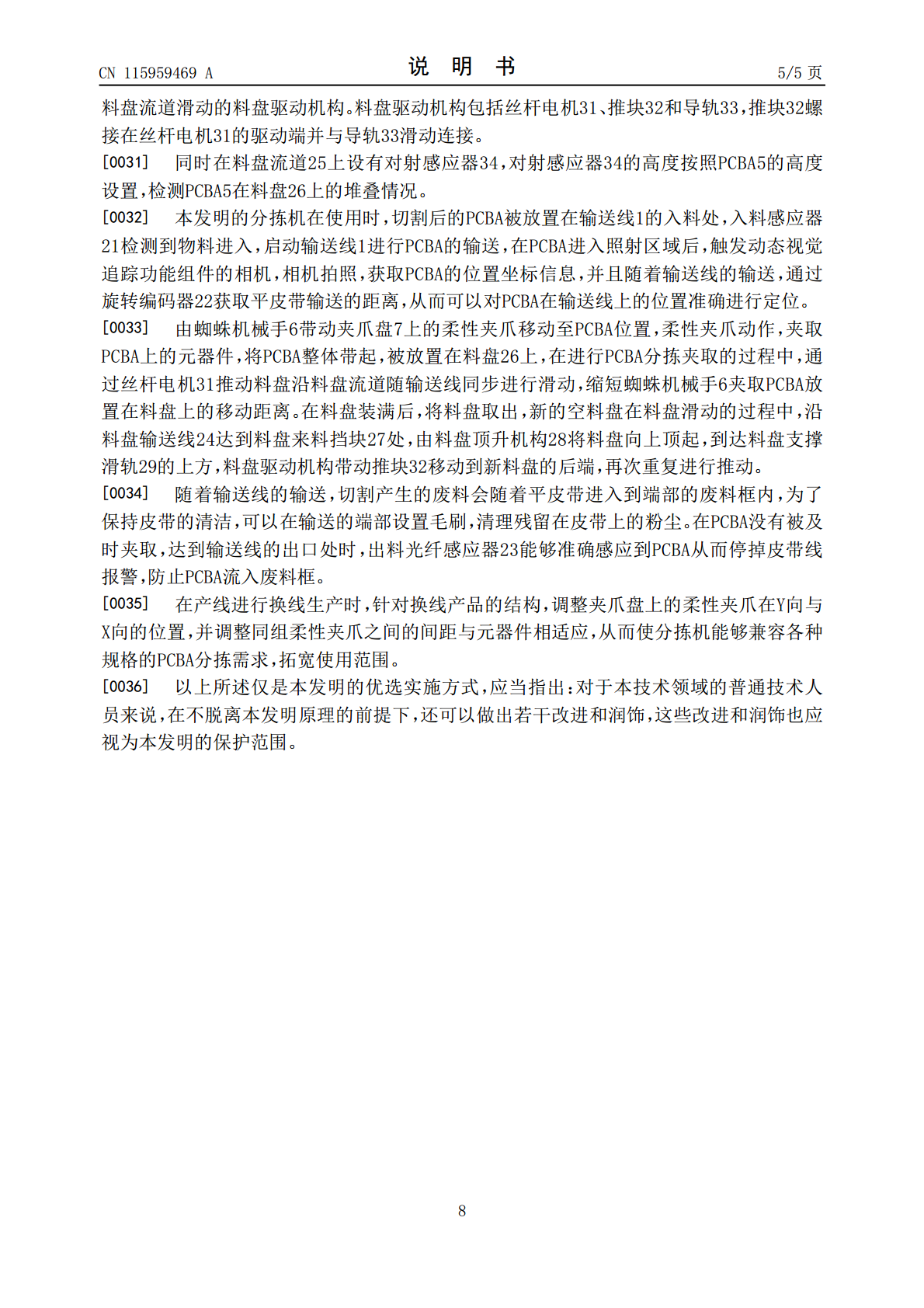
本发明公开了一种使用柔性夹爪的PCBA分拣机,包括用于进行切割后的PCBA输送的输送线,设置在输送线上方用于对PCBA位置进行检测定位的动态视觉追踪功能组件,用于进行输送线上PCBA柔性夹持分拣的柔性夹持机构,以及用于带动料盘接收分拣后的PCBA的料盘供料机构。本发明通过动态视觉追踪功能组件识别PCBA在输送线上的位置,再由柔性夹持机构夹取PCBA上的元器件进行PCBA夹取分拣,配合蜘蛛机械手能够实现高速夹取和摆放需求,提高分拣效率,柔性夹爪的间距位置均可调,能够满足不同类型PCBA夹取需求,使产线能够换

一种柔性夹爪.pdf
本发明公开了一种柔性夹爪,抓取时零件只发生垂直提升运动,避免零件与原有支撑物之间发生表面刮蹭,也避免零件与本发明的夹爪之间发生表面刮蹭;立柱同侧的一对支撑导轨上的滑块及滑动支撑块分别通过不同的气缸进行驱动,从而使得每个滑块的滑动距离及每个滑动支撑块的滑动距离都可以单独进行调节;左右两侧的滑动支撑块所在支撑导轨上的位置及相对支撑导轨的垂直距离可单独调节,使夹爪可以夹取共轴线或者不共轴线、两端直径相同或者不同的轴类零件;门架立柱的另一侧与另一门架立柱通过连接板连接,设置有左、右对称的两对夹爪,该连接板可与安装

一种电动柔性夹爪.pdf
本发明提供一种电动柔性夹爪,包括:至少两个夹爪机构,包括包胶夹爪、夹爪片弹簧和夹爪基座,所述夹爪片弹簧一端固定于所述夹爪基座,另一端固定安装所述包胶夹爪;每一个所述夹爪机构均设置一个双保持直通电磁铁;所述双保持直通电磁铁固定于所述夹爪基座;所述双保持直通电磁铁包括拉杆,所述夹爪片弹簧包括通孔,所述拉杆穿过所述通孔;所述拉杆外侧端部设置阻挡机构,所述阻挡机构用于防止所述拉杆由所述通孔完全抽出。本发明的技术方案解决了现有技术中的自动化夹具断电或断气情况下容易发生误操作且刚性夹住容易造成目标物损伤的问题。
一种压电式柔性夹爪.pdf
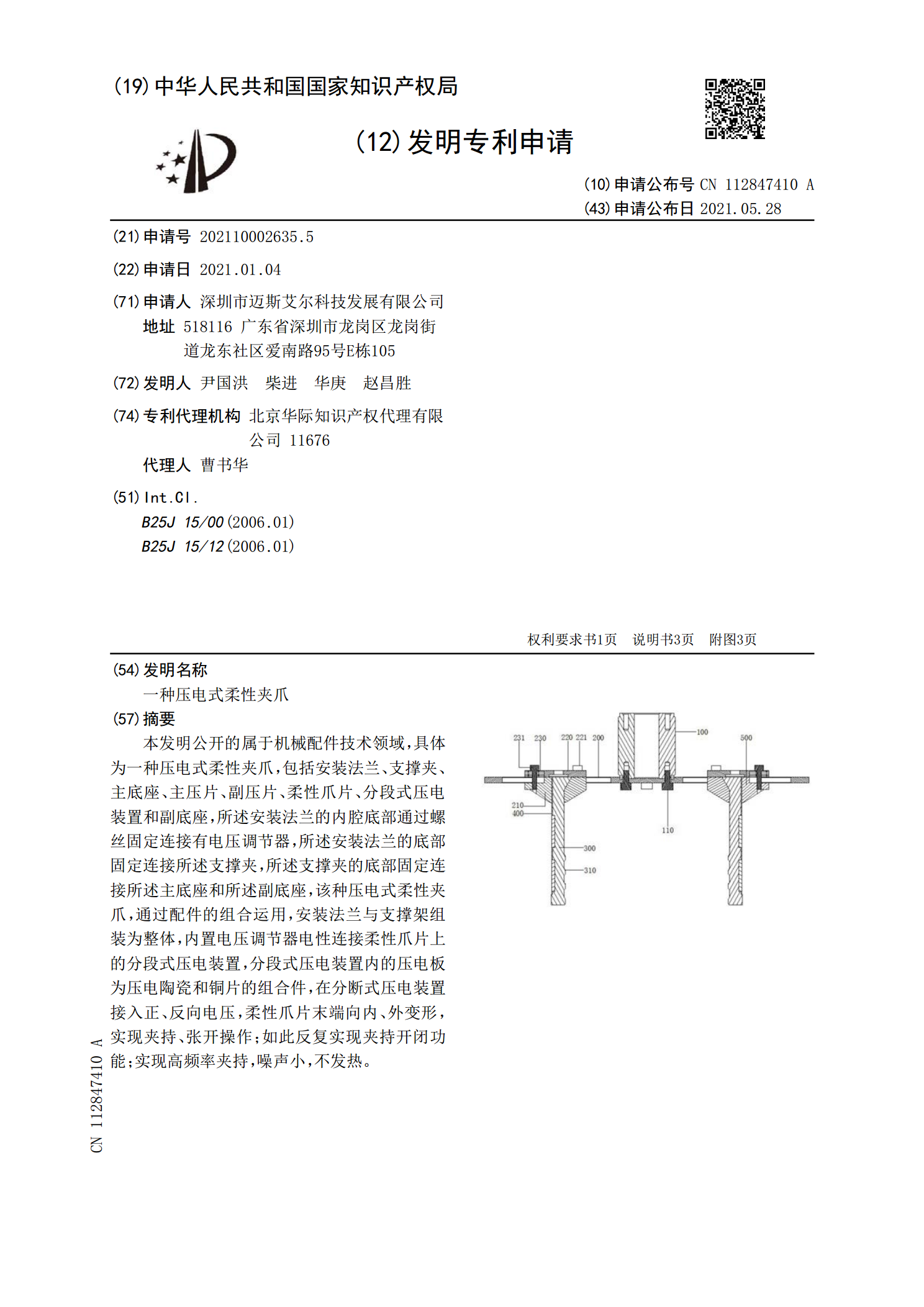
本发明公开的属于机械配件技术领域,具体为一种压电式柔性夹爪,包括安装法兰、支撑夹、主底座、主压片、副压片、柔性爪片、分段式压电装置和副底座,所述安装法兰的内腔底部通过螺丝固定连接有电压调节器,所述安装法兰的底部固定连接所述支撑夹,所述支撑夹的底部固定连接所述主底座和所述副底座,该种压电式柔性夹爪,通过配件的组合运用,安装法兰与支撑架组装为整体,内置电压调节器电性连接柔性爪片上的分段式压电装置,分段式压电装置内的压电板为压电陶瓷和铜片的组合件,在分断式压电装置接入正、反向电压,柔性爪片末端向内、外变形,实现
一种仿兽爪电控永磁夹料机构及柔性拉形机.pdf
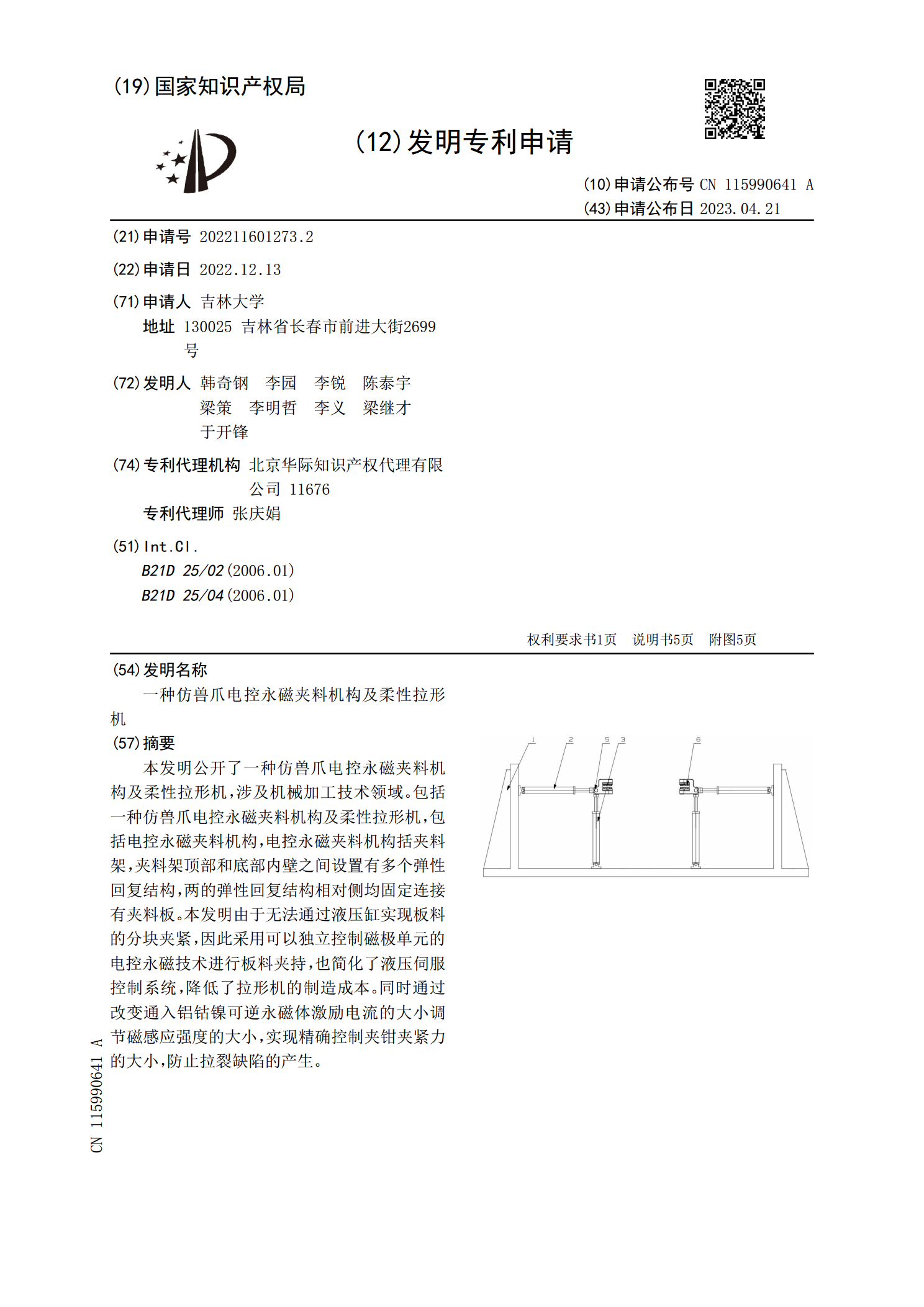
本发明公开了一种仿兽爪电控永磁夹料机构及柔性拉形机,涉及机械加工技术领域。包括一种仿兽爪电控永磁夹料机构及柔性拉形机,包括电控永磁夹料机构,电控永磁夹料机构括夹料架,夹料架顶部和底部内壁之间设置有多个弹性回复结构,两的弹性回复结构相对侧均固定连接有夹料板。本发明由于无法通过液压缸实现板料的分块夹紧,因此采用可以独立控制磁极单元的电控永磁技术进行板料夹持,也简化了液压伺服控制系统,降低了拉形机的制造成本。同时通过改变通入铝钴镍可逆永磁体激励电流的大小调节磁感应强度的大小,实现精确控制夹钳夹紧力的大小,防止拉