
一种深海自主水下航行器用磁耦合转舵装置.pdf

书錦****by

1/8

2/8
3/8
4/8
5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种深海自主水下航行器用磁耦合转舵装置.pdf
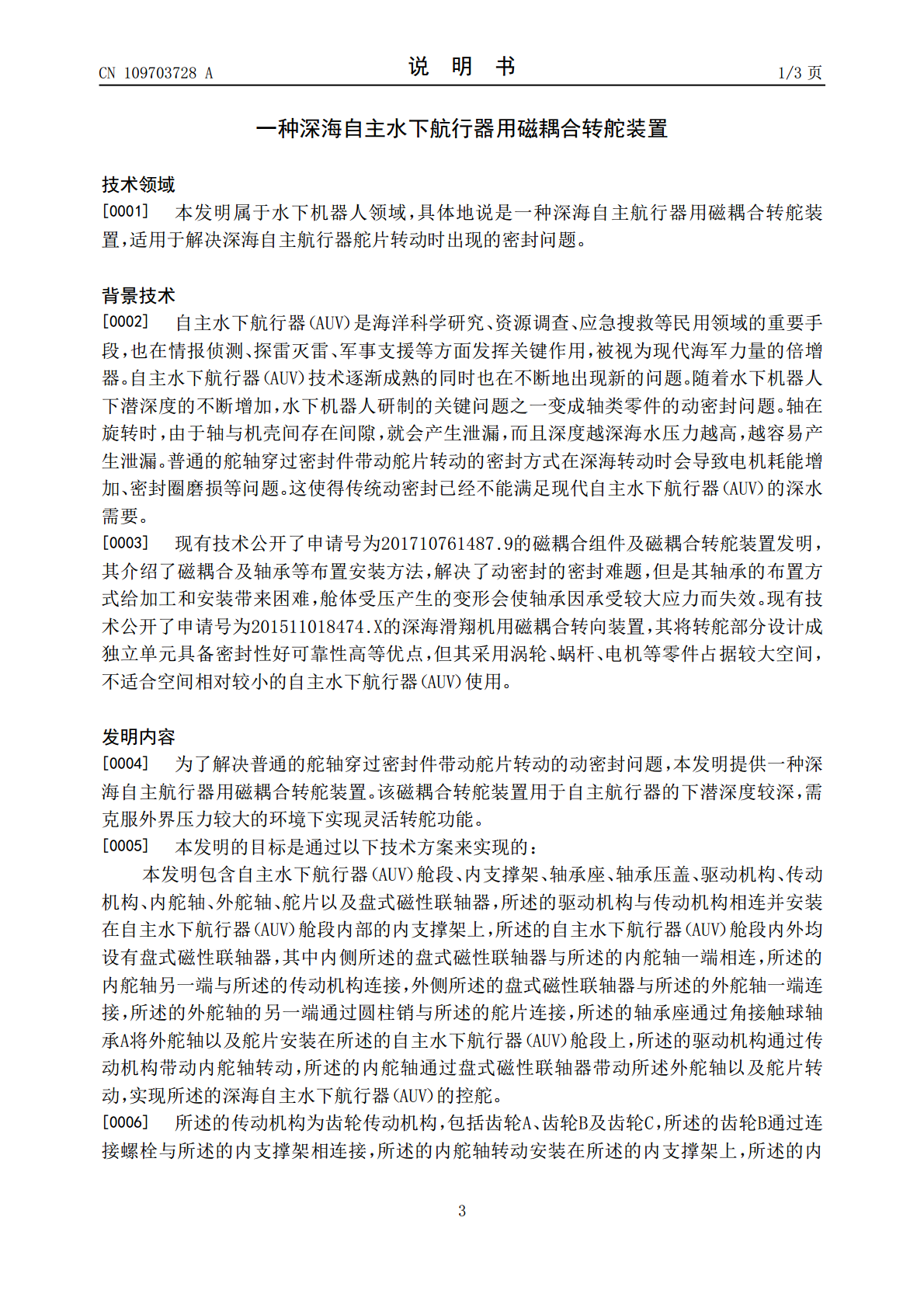
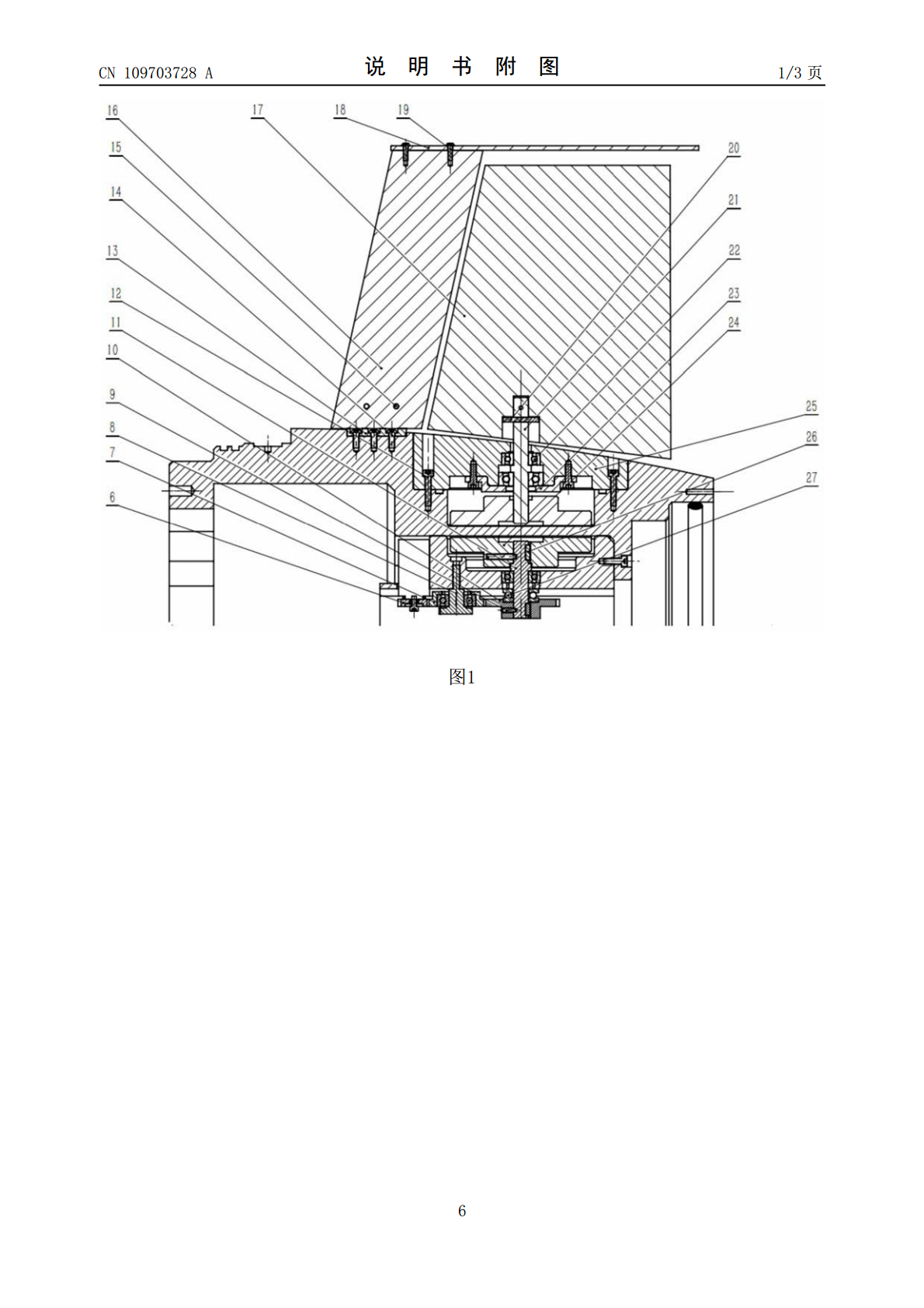
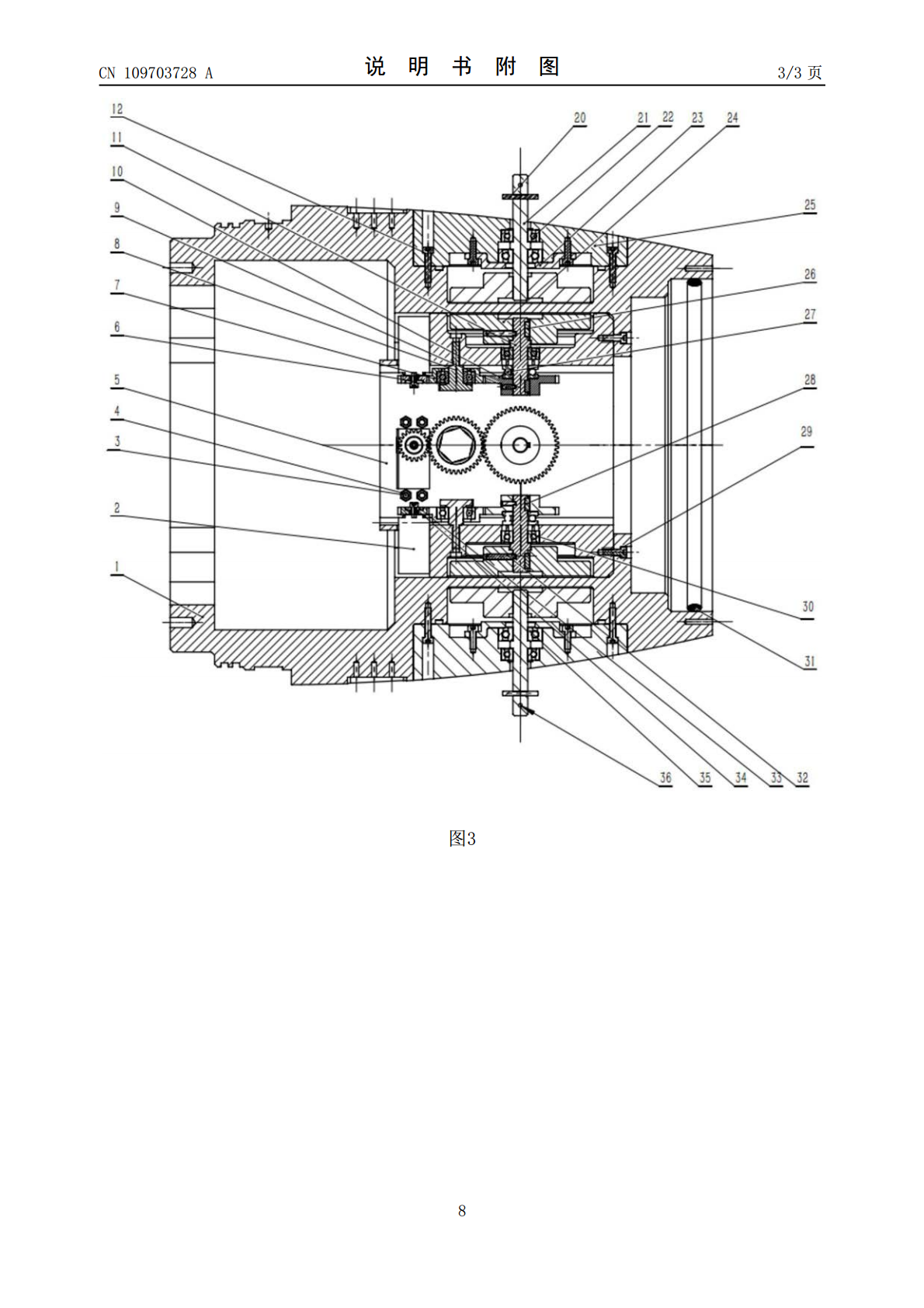
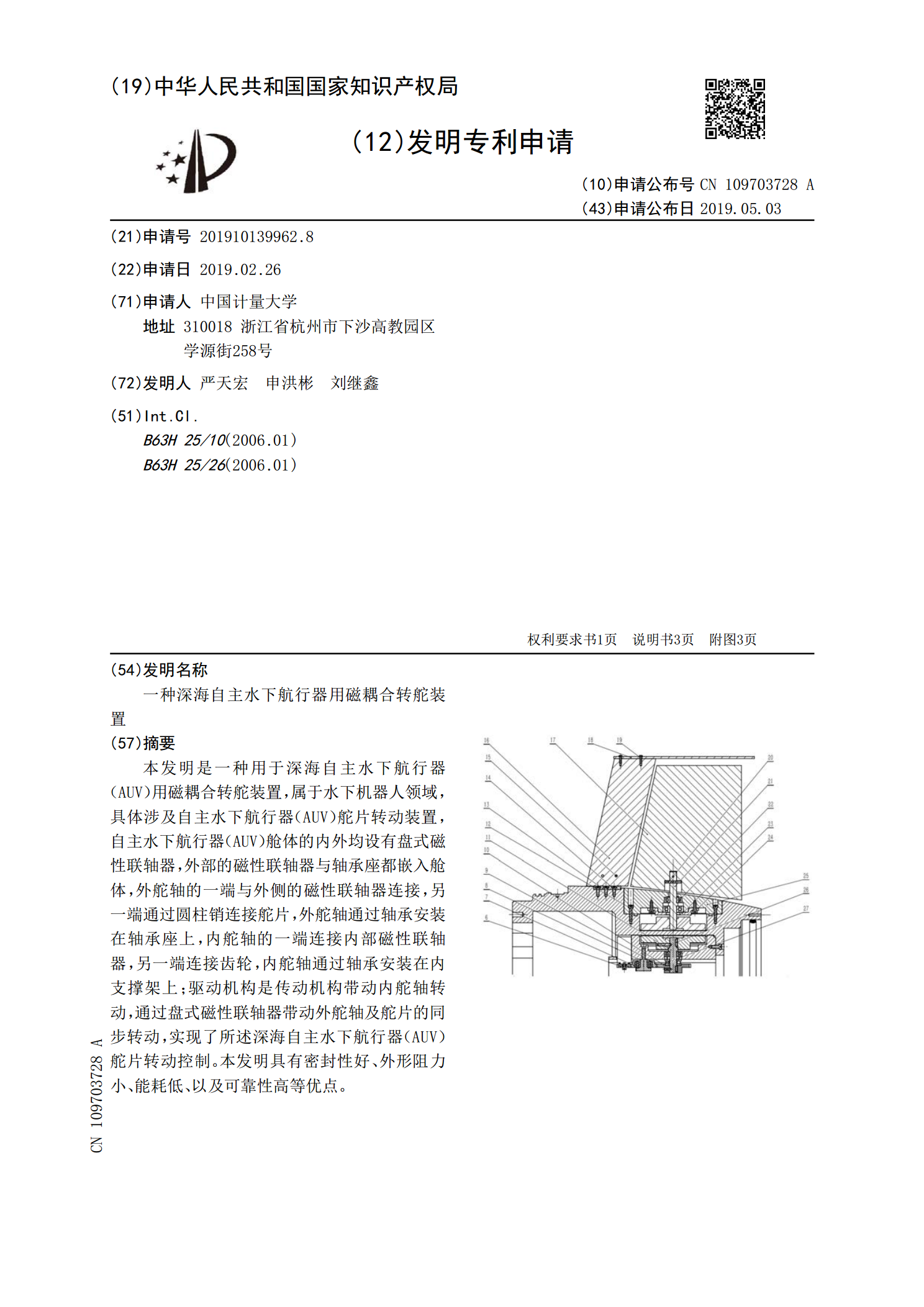
本发明是一种用于深海自主水下航行器(AUV)用磁耦合转舵装置,属于水下机器人领域,具体涉及自主水下航行器(AUV)舵片转动装置,自主水下航行器(AUV)舱体的内外均设有盘式磁性联轴器,外部的磁性联轴器与轴承座都嵌入舱体,外舵轴的一端与外侧的磁性联轴器连接,另一端通过圆柱销连接舵片,外舵轴通过轴承安装在轴承座上,内舵轴的一端连接内部磁性联轴器,另一端连接齿轮,内舵轴通过轴承安装在内支撑架上;驱动机构是传动机构带动内舵轴转动,通过盘式磁性联轴器带动外舵轴及舵片的同步转动,实现了所述深海自主水下航行器(AUV)

一种自主水下航行器用可伸缩天线装置.pdf
本发明是一种自主水下航行器(AUV)用可伸缩天线装置,属于水下机器人领域,具体涉及自主水下航行器(AUV)天线装置,自主水下航行器(AUV)可伸缩天线安装在自主水下航行器(AUV)独立非密封舱体内,天线主体设计独立的密封空间安置各种天线,传动机构为齿轮齿条机构,齿轮固定在传动轴上,传动轴的另一端通过一对啮合的锥齿轮与电动机连接,电动机转动带动锥齿轮转动从而带动传动轴和齿轮转动,达到驱动天线进行伸缩运动的目的。本发明具有阻力低、能耗低、可靠性高等优点。
一种自主水下航行器用舱体装配与对接平台.pdf
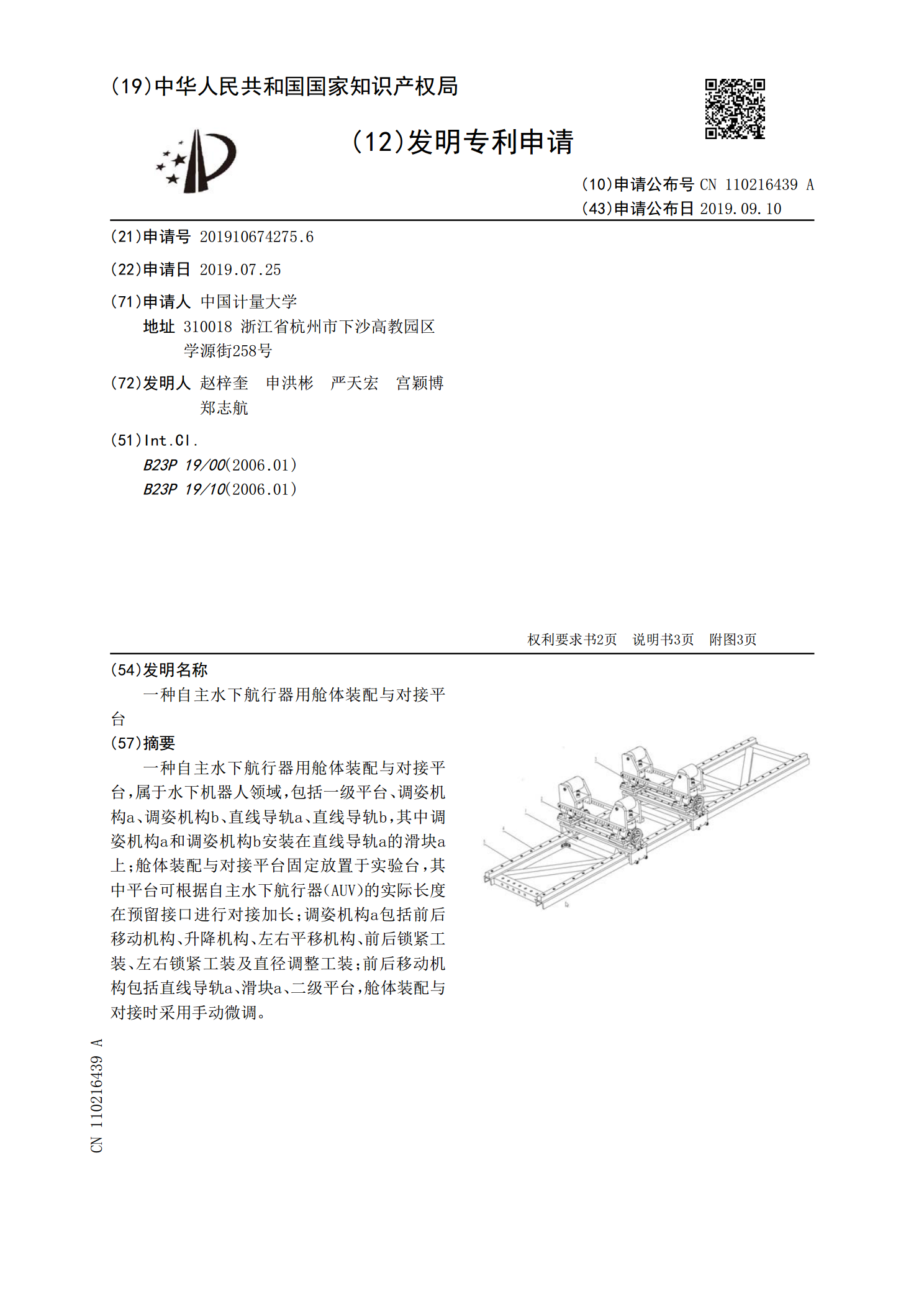
一种自主水下航行器用舱体装配与对接平台,属于水下机器人领域,包括一级平台、调姿机构a、调姿机构b、直线导轨a、直线导轨b,其中调姿机构a和调姿机构b安装在直线导轨a的滑块a上;舱体装配与对接平台固定放置于实验台,其中平台可根据自主水下航行器(AUV)的实际长度在预留接口进行对接加长;调姿机构a包括前后移动机构、升降机构、左右平移机构、前后锁紧工装、左右锁紧工装及直径调整工装;前后移动机构包括直线导轨a、滑块a、二级平台,舱体装配与对接时采用手动微调。
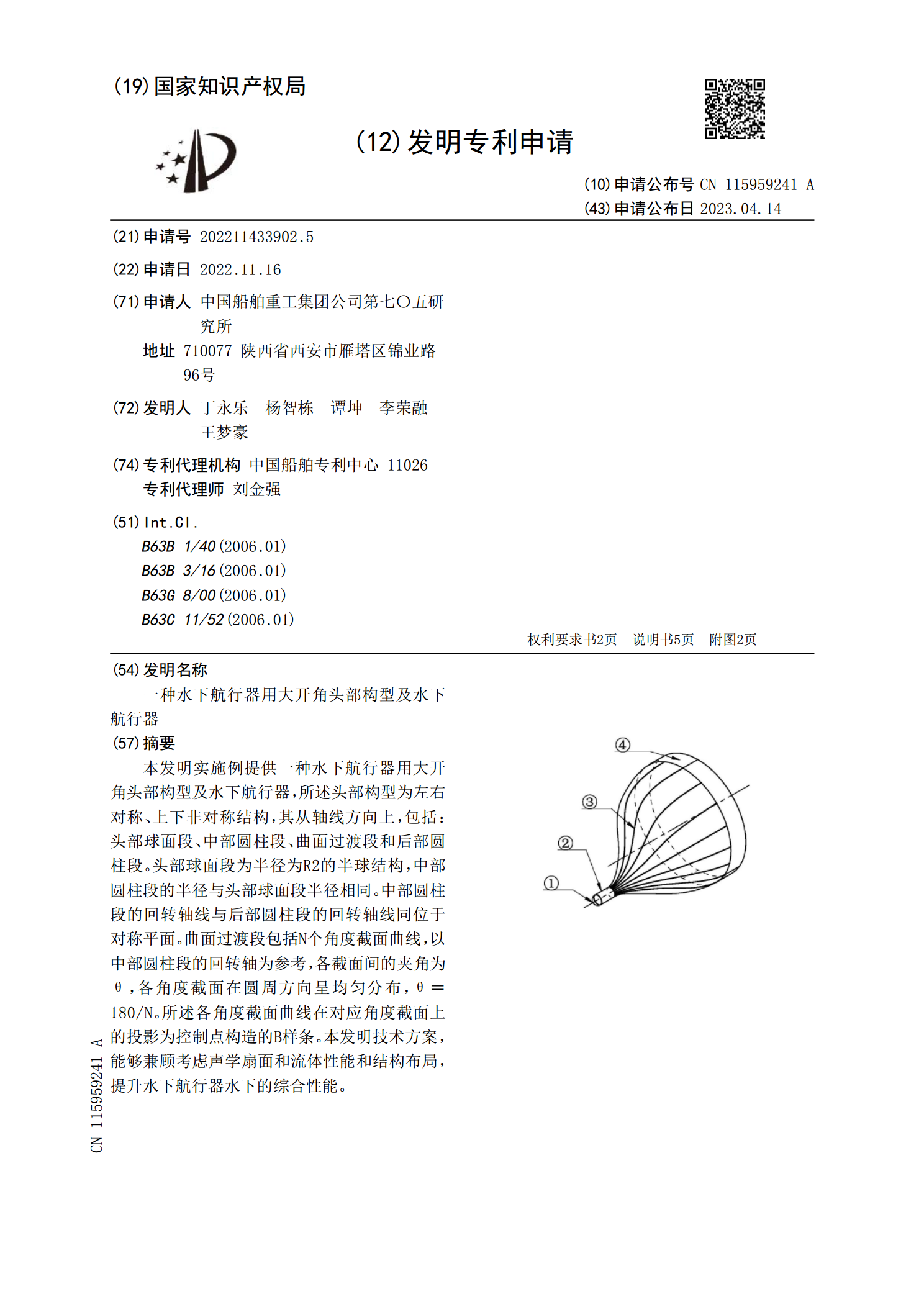
一种水下航行器用大开角头部构型及水下航行器.pdf
本发明实施例提供一种水下航行器用大开角头部构型及水下航行器,所述头部构型为左右对称、上下非对称结构,其从轴线方向上,包括:头部球面段、中部圆柱段、曲面过渡段和后部圆柱段。头部球面段为半径为R2的半球结构,中部圆柱段的半径与头部球面段半径相同。中部圆柱段的回转轴线与后部圆柱段的回转轴线同位于对称平面。曲面过渡段包括N个角度截面曲线,以中部圆柱段的回转轴为参考,各截面间的夹角为θ,各角度截面在圆周方向呈均匀分布,θ=180/N。所述各角度截面曲线在对应角度截面上的投影为控制点构造的B样条。本发明技术方案,能够
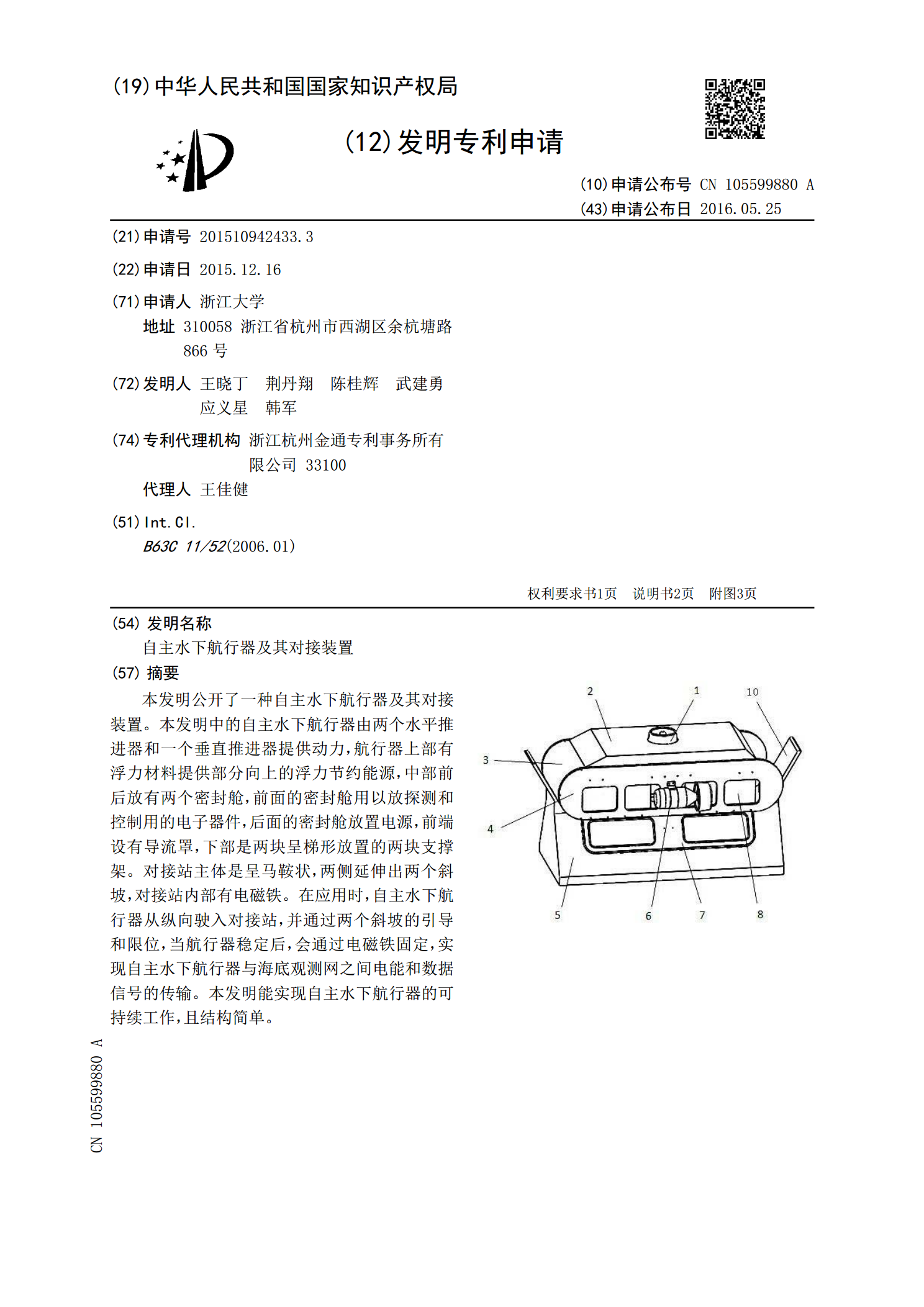
自主水下航行器及其对接装置.pdf
本发明公开了一种自主水下航行器及其对接装置。本发明中的自主水下航行器由两个水平推进器和一个垂直推进器提供动力,航行器上部有浮力材料提供部分向上的浮力节约能源,中部前后放有两个密封舱,前面的密封舱用以放探测和控制用的电子器件,后面的密封舱放置电源,前端设有导流罩,下部是两块呈梯形放置的两块支撑架。对接站主体是呈马鞍状,两侧延伸出两个斜坡,对接站内部有电磁铁。在应用时,自主水下航行器从纵向驶入对接站,并通过两个斜坡的引导和限位,当航行器稳定后,会通过电磁铁固定,实现自主水下航行器与海底观测网之间电能和数据信号